一種智能無人機巡檢系統(tǒng)的制作方法
本說明書的多個實施例涉及自動化,具體涉及一種智能無人機巡檢系統(tǒng)。
背景技術(shù):
1、智能無人機巡檢系統(tǒng)是一種集成了現(xiàn)代無人機技術(shù)、傳感器技術(shù)以及數(shù)據(jù)處理與分析工具的先進綜合管理系統(tǒng),專門設(shè)計用于對特定區(qū)域或設(shè)施進行高效且精確的監(jiān)測與檢查。這種系統(tǒng)利用了最新的飛行控制技術(shù),使得無人機能夠在預(yù)設(shè)的路徑上自主飛行,并根據(jù)任務(wù)需求靈活調(diào)整飛行模式。通過搭載高清攝像頭、紅外熱成像儀和激光雷達等先進的傳感器設(shè)備,智能無人機能夠捕捉到目標區(qū)域的信息。在執(zhí)行任務(wù)過程中,無人機通過無線通信技術(shù)實時傳輸收集到的數(shù)據(jù)回到地面控制中心。因其高效便捷的特性,無人機巡檢被廣泛應(yīng)用在各個領(lǐng)域,包括城市的巡檢中。用于發(fā)現(xiàn)車輛違停、垃圾違規(guī)堆放等,幫助及時快速處理出現(xiàn)的問題。
技術(shù)實現(xiàn)思路
1、本說明書多個實施例描述了一種智能無人機巡檢系統(tǒng)。
2、第一方面,本說明書實施例提供了一種智能無人機巡檢系統(tǒng),所述系統(tǒng)執(zhí)行以下步驟:
3、讀取待巡檢的目標區(qū)域范圍及歷史巡檢記錄;
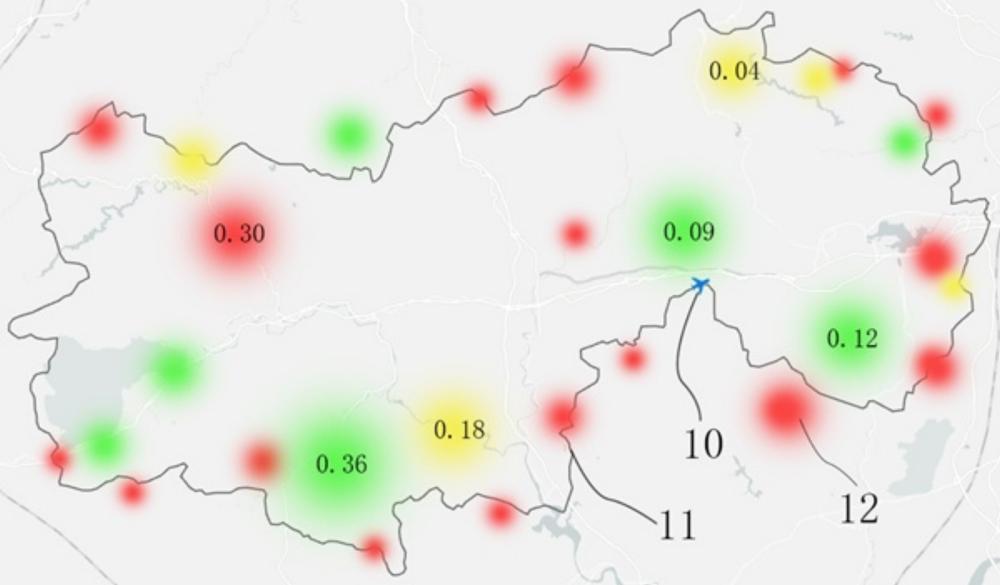
4、根據(jù)歷史巡檢記錄生成所述目標區(qū)域范圍的事件熱力圖,所述事件熱力圖記錄目標區(qū)域范圍內(nèi)每個位置發(fā)生事件的概率分布;
5、根據(jù)所述事件熱力圖將所述目標區(qū)域范圍劃分為若干個子區(qū)域,所述子區(qū)域為發(fā)生事件的概率的差值小于預(yù)設(shè)閾值的區(qū)域;
6、為每個子區(qū)域生成巡檢路線集及巡檢頻率,所述巡檢路線集包括若干個巡檢路線;
7、根據(jù)所述巡檢路線集生成機場位置,控制所述無人機按照所述巡檢頻率,依次循環(huán)執(zhí)行所述巡檢路線集中的巡檢路線。
8、第二方面,本說明書實施例提供了又一智能無人機巡檢系統(tǒng),包括:
9、讀取模塊,讀取待巡檢的目標區(qū)域范圍及歷史巡檢記錄;
10、讀取模塊,根據(jù)歷史巡檢記錄生成所述目標區(qū)域范圍的事件熱力圖,所述事件熱力圖記錄目標區(qū)域范圍內(nèi)每個位置發(fā)生事件的概率分布;
11、劃分模塊,根據(jù)所述事件熱力圖將所述目標區(qū)域范圍劃分為若干個子區(qū)域,所述子區(qū)域為發(fā)生事件的概率的差值小于預(yù)設(shè)閾值的區(qū)域;
12、生成模塊,為每個子區(qū)域生成巡檢路線集及巡檢頻率,所述巡檢路線集包括若干個巡檢路線;
13、執(zhí)行模塊,根據(jù)所述巡檢路線集生成機場位置,控制所述無人機按照所述巡檢頻率,依次循環(huán)執(zhí)行所述巡檢路線集中的巡檢路線。
14、第三方面,本說明書實施例提供了電子設(shè)備,包括處理器以及存儲器;
15、所述處理器與所述存儲器相連;
16、所述存儲器,用于存儲可執(zhí)行程序代碼;
17、所述處理器通過讀取所述存儲器中存儲的可執(zhí)行程序代碼來運行與所述可執(zhí)行程序代碼對應(yīng)的程序,以用于執(zhí)行上述任一方面所述的方法。
18、第四方面,本說明書實施例提供了計算機可讀存儲介質(zhì),其上存儲有計算機程序,所述計算機程序被處理器執(zhí)行時實現(xiàn)上述任一方面所述的方法。
19、第五方面,本說明書實施例提供了計算機程序產(chǎn)品,包括計算機程序,該計算機程序被處理器執(zhí)行時實現(xiàn)上述任一方面所述的方法。
20、本說明書一些實施例提供的技術(shù)方案帶來的有益效果至少包括:
21、在本說明書多個實施例中,提供的智能無人機巡檢系統(tǒng)借助事件熱力圖及巡檢頻率的控制,實現(xiàn)對不同事件概率區(qū)域的區(qū)別化巡檢,有助于巡檢及早發(fā)現(xiàn)事件,幫助提高事件處置效率;通過方格的劃分能夠快速的根據(jù)歷史巡檢記錄,獲得事件熱力圖,并通過等效值的方式,彌補歷史巡檢記錄的偶然性。
22、本說明書多個實施例的其他特點和優(yōu)點將會在下面的具體實施方式、附圖中進一步揭示。
技術(shù)特征:
1.一種智能無人機巡檢系統(tǒng),其特征在于,所述系統(tǒng)執(zhí)行以下步驟:
2.根據(jù)權(quán)利要求1所述的一種智能無人機巡檢系統(tǒng),其特征在于,
3.根據(jù)權(quán)利要求2所述的一種智能無人機巡檢系統(tǒng),其特征在于,
4.根據(jù)權(quán)利要求3所述的一種智能無人機巡檢系統(tǒng),其特征在于,
5.根據(jù)權(quán)利要求1至4任一項所述的一種智能無人機巡檢系統(tǒng),其特征在于,
6.根據(jù)權(quán)利要求5所述的一種智能無人機巡檢系統(tǒng),其特征在于,
7.一種智能無人機巡檢系統(tǒng),其特征在于,包括:
8.電子設(shè)備,其特征在于,包括處理器以及存儲器;
9.計算機可讀存儲介質(zhì),其上存儲有計算機程序,其特征在于,所述計算機程序被處理器執(zhí)行時實現(xiàn)如權(quán)利要求1-6任一項所述系統(tǒng)執(zhí)行的方法。
10.計算機程序產(chǎn)品,包括計算機程序,其特征在于,該計算機程序被處理器執(zhí)行時實現(xiàn)如權(quán)利要求1-6任一項所述系統(tǒng)執(zhí)行的方法。
技術(shù)總結(jié)
本說明書的多個實施例涉及自動化技術(shù)領(lǐng)域,具體涉及一種智能無人機巡檢系統(tǒng)。一種智能無人機巡檢系統(tǒng),所述系統(tǒng)執(zhí)行以下步驟:讀取待巡檢的目標區(qū)域范圍及歷史巡檢記錄;根據(jù)歷史巡檢記錄生成所述目標區(qū)域范圍的事件熱力圖,所述事件熱力圖記錄目標區(qū)域范圍內(nèi)每個位置發(fā)生事件的概率分布;根據(jù)所述事件熱力圖將所述目標區(qū)域范圍劃分為若干個子區(qū)域,所述子區(qū)域為發(fā)生事件的概率的差值小于預(yù)設(shè)閾值的區(qū)域;為每個子區(qū)域生成巡檢路線集及巡檢頻率,所述巡檢路線集包括若干個巡檢路線;根據(jù)所述巡檢路線集生成機場位置,控制所述無人機按照所述巡檢頻率,依次循環(huán)執(zhí)行所述巡檢路線集中的巡檢路線。
技術(shù)研發(fā)人員:姜克林
受保護的技術(shù)使用者:杭州時尚科技有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!