晶圓的吸平整定結(jié)構(gòu)及吸平整定方法、晶圓檢測裝置與流程
本技術(shù)涉及晶圓檢測,具體涉及一種晶圓的吸平整定結(jié)構(gòu)及吸平整定方法、晶圓檢測裝置。
背景技術(shù):
1、晶圓檢測裝置是一種用于半導(dǎo)體器件測試和表征的重要設(shè)備,并能夠測試晶圓上的集成電路器件的性能。在晶圓檢測裝置對晶圓進(jìn)行測試前,需要對晶圓進(jìn)行預(yù)對準(zhǔn),以將晶圓的型號及位置進(jìn)行精確地識別和校準(zhǔn),以確保晶圓檢測裝置能夠?qū)A進(jìn)行精準(zhǔn)的匹配和測試。
2、但是,在晶圓制造的過程中,部分晶圓會發(fā)生翹曲變形等現(xiàn)象。在晶圓檢測的過程中,翹曲變形的晶圓片不利于晶圓進(jìn)行預(yù)對準(zhǔn)的定位、掃碼、及后續(xù)的檢測等步驟。相關(guān)技術(shù)中,常規(guī)的晶圓檢測裝置無法對翹曲變形的晶圓進(jìn)行有效地定位和檢測。
技術(shù)實現(xiàn)思路
1、本技術(shù)的目的在于提供一種晶圓的吸平整定結(jié)構(gòu)及吸平整定方法、晶圓檢測裝置,以解決相關(guān)技術(shù)中,常規(guī)的晶圓檢測裝置無法對翹曲變形的晶圓進(jìn)行有效地定位和檢測的技術(shù)問題。
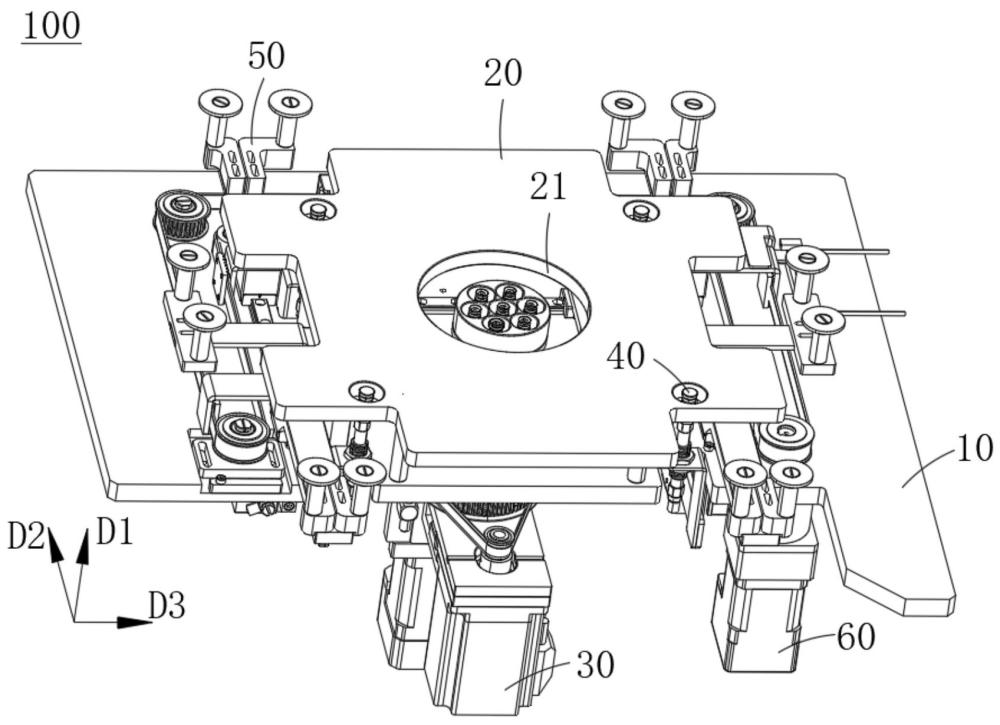
2、第一方面,本技術(shù)提供了一種晶圓的吸平整定結(jié)構(gòu),包括:
3、底板;
4、承載板,所述承載板設(shè)于所述底板上且和所述底板間隔設(shè)置,所述承載板用于承載晶圓;
5、升降旋轉(zhuǎn)模組,所述升降旋轉(zhuǎn)模組設(shè)于所述底板上,所述升降旋轉(zhuǎn)模組包括旋轉(zhuǎn)機(jī)構(gòu)和升降機(jī)構(gòu),所述旋轉(zhuǎn)機(jī)構(gòu)用于承載所述晶圓并帶動所述晶圓相對所述底板轉(zhuǎn)動,所述升降機(jī)構(gòu)用于承載所述旋轉(zhuǎn)機(jī)構(gòu),并帶動所述旋轉(zhuǎn)機(jī)構(gòu)沿第一方向往復(fù)移動,所述第一方向垂直于所述底板;
6、吸平模組,所述吸平模組設(shè)于所述底板上,所述吸平模組至少部分穿設(shè)所述承載板和所述底板,所述吸平模組用于承載并吸平所述晶圓,所述吸平模組能夠沿所述第一方向往復(fù)移動,以將所述晶圓吸平設(shè)于所述承載板上;以及
7、整定模組,所述整定模組設(shè)于所述底板上,所述整定模組包括第一整定機(jī)構(gòu)、第二整定機(jī)構(gòu)、第三整定機(jī)構(gòu)和第四整定機(jī)構(gòu),所述第一整定機(jī)構(gòu)、所述第二整定機(jī)構(gòu)、所述第三整定機(jī)構(gòu)和所述第四整定機(jī)構(gòu)環(huán)繞所述承載板設(shè)置且分別設(shè)于所述承載板的四周,所述第一整定機(jī)構(gòu)、所述第二整定機(jī)構(gòu)、所述第三整定機(jī)構(gòu)和所述第四整定機(jī)構(gòu)皆可用于沿靠近所述承載板中心的所在側(cè)移動,以將所述承載板上的所述晶圓進(jìn)行整定。
8、本技術(shù)提供的吸平整定結(jié)構(gòu)中,承載板設(shè)于底板上且和底板間隔設(shè)置,升降旋轉(zhuǎn)模組設(shè)于底板上,升降旋轉(zhuǎn)模組包括旋轉(zhuǎn)機(jī)構(gòu)和升降機(jī)構(gòu),旋轉(zhuǎn)機(jī)構(gòu)用于承載晶圓并帶動晶圓相對底板轉(zhuǎn)動,升降機(jī)構(gòu)用于承載旋轉(zhuǎn)機(jī)構(gòu),并帶動旋轉(zhuǎn)機(jī)構(gòu)沿第一方向往復(fù)移動。吸平模組設(shè)于底板上,吸平模組至少部分穿設(shè)承載板和底板,吸平模組用于承載并吸平晶圓,吸平模組能夠沿第一方向往復(fù)移動,以將晶圓吸平設(shè)于承載板上。整定模組設(shè)于底板上,整定模組包括第一整定機(jī)構(gòu)、第二整定機(jī)構(gòu)、第三整定機(jī)構(gòu)和第四整定機(jī)構(gòu),第一整定機(jī)構(gòu)、第二整定機(jī)構(gòu)、第三整定機(jī)構(gòu)和第四整定機(jī)構(gòu)環(huán)繞承載板設(shè)置且分別設(shè)于承載板的四周,第一整定機(jī)構(gòu)、第二整定機(jī)構(gòu)、第三整定機(jī)構(gòu)和第四整定機(jī)構(gòu)皆可用于沿靠近承載板中心的所在側(cè)移動,以將承載板上的晶圓進(jìn)行整定。吸平模組能夠帶動晶圓沿第一方向的反方向移動,以將晶圓吸平的放置于承載板上,能夠保證晶圓的平整性,方便對于晶圓進(jìn)行預(yù)對準(zhǔn)的定位、掃碼等操作;整定模組能夠?qū)Τ休d板上的晶圓進(jìn)行整定,使較大尺寸的晶圓實現(xiàn)居中,能夠有效地校正晶圓的位置,并方便后續(xù)對晶圓的運輸及檢測等步驟。
9、其中,所述整定模組還包括整定驅(qū)動機(jī)構(gòu),所述整定驅(qū)動機(jī)構(gòu)連接所述第一整定機(jī)構(gòu),用于帶動所述第一整定機(jī)構(gòu)沿第二方向及其反方向移動;所述整定驅(qū)動機(jī)構(gòu)連接所述第二整定機(jī)構(gòu),用于帶動所述第二整定機(jī)構(gòu)沿第三方向及其反方向移動;所述整定驅(qū)動機(jī)構(gòu)連接所述第三整定機(jī)構(gòu),用于帶動所述第三整定機(jī)構(gòu)沿所述第一方向及其反方向移動;所述整定驅(qū)動機(jī)構(gòu)連接所述第四整定機(jī)構(gòu),用于帶動所述第四整定機(jī)構(gòu)沿所述第三方向及其反方向移動,其中,所述第二方向和所述第三方向垂直,且所述第二方向、所述第三方向皆和所述第一方向垂直。
10、其中,所述整定模組還包括第五整定機(jī)構(gòu)和第六整定機(jī)構(gòu),所述第一整定機(jī)構(gòu)和所述第五整定機(jī)構(gòu)沿所述第三方向間隔設(shè)置,所述第三整定機(jī)構(gòu)和所述第六整定機(jī)構(gòu)沿所述第三方向間隔設(shè)置;
11、所述整定模組還包括導(dǎo)軌組件,所述導(dǎo)軌組件包括第一導(dǎo)軌、第二導(dǎo)軌和第三導(dǎo)軌,所述第一導(dǎo)軌和所述第三導(dǎo)軌沿所述第二方向延伸且間隔設(shè)置,所述第二導(dǎo)軌沿所述第三方向延伸;其中,所述第一整定機(jī)構(gòu)和所述第三整定機(jī)構(gòu)滑動連接所述第一導(dǎo)軌,所述第一整定機(jī)構(gòu)和所述第三整定機(jī)構(gòu)沿所述第一導(dǎo)軌朝向所述第二方向及其反方向移動,所述第五整定機(jī)構(gòu)和所述第六整定機(jī)構(gòu)滑動連接所述第三導(dǎo)軌,所述第五整定機(jī)構(gòu)和所述第六整定機(jī)構(gòu)沿所述第二導(dǎo)軌朝向所述第二方向及其反方向移動,所述第二整定機(jī)構(gòu)和所述第四整定機(jī)構(gòu)滑動連接所述第二導(dǎo)軌,所述第二整定機(jī)構(gòu)和所述第四整定機(jī)構(gòu)沿所述第二導(dǎo)軌朝向所述第三方向及其反方向移動。
12、其中,所述整定驅(qū)動機(jī)構(gòu)包括整定驅(qū)動電機(jī)和傳送帶組件,所述整定驅(qū)動電機(jī)連接所述傳送帶組件且用于帶動所述傳送帶組件移動;
13、所述傳送帶組件包括外傳送帶和內(nèi)傳送帶,所述外傳送帶和所述內(nèi)傳送帶相連,所述外傳送帶和所述內(nèi)傳送帶的傳送方向相反;
14、所述內(nèi)傳送帶包括依次相連的第一傳送部、第二傳送部和第三傳送部,所述外傳送帶包括依次相連的第四傳送部、第五傳送部和第六傳送部,所述第一傳送部和所述第四傳送部對應(yīng)設(shè)置且移動方向相反,所述第二傳送部和所述第五傳送部對應(yīng)設(shè)置且移動方向相反,所述第三傳送部和所述第六傳送部對應(yīng)設(shè)置且移動方向相反,所述第一傳送部、所述第三傳送部、所述第四傳送部、所述第六傳送部沿所述第二方向延伸,所述第二傳送部和所述第五傳送部沿所述第三方向延伸;
15、所述第一整定機(jī)構(gòu)連接所述第一傳送部,所述第三整定機(jī)構(gòu)連接所述第四傳送部,所述第一整定機(jī)構(gòu)和所述第三整定機(jī)構(gòu)的移動方向相反;所述第二整定機(jī)構(gòu)連接所述第二傳送部,所述第四整定機(jī)構(gòu)連接所述第五傳送部,所述第二整定機(jī)構(gòu)和所述第四整定機(jī)構(gòu)的移動方向相反;所述第五整定機(jī)構(gòu)連接所述第三傳送部,所述第六整定機(jī)構(gòu)連接所述第六傳送部,所述第五整定機(jī)構(gòu)和所述第六整定機(jī)構(gòu)的移動方向相反。
16、其中,所述整定模組包括縮回狀態(tài)和張開狀態(tài),當(dāng)所述整定模組處于縮回狀態(tài)時,所述整定驅(qū)動電機(jī)順時針轉(zhuǎn)動,所述內(nèi)傳送帶沿逆時針移動,所述外傳送帶沿順時針移動,所述第一傳送部帶動所述第一整定機(jī)構(gòu)沿所述第二方向移動,所述第二傳送部帶動所述第二整定機(jī)構(gòu)沿所述第三方向的反方向移動,所述第三傳送部帶動所述第六整定機(jī)構(gòu)沿所述第二方向的反方向移動,所述第四傳送部帶動所述第三整定機(jī)構(gòu)沿所述第二方向的反方向移動,所述第五傳送部帶動所述第四整定機(jī)構(gòu)沿所述第三方向移動;所述第六傳送部帶動所述第五整定機(jī)構(gòu)沿所述第二方向移動;
17、當(dāng)所述整定模組處于張開狀態(tài)時,所述整定驅(qū)動電機(jī)逆時針轉(zhuǎn)動,所述內(nèi)傳送帶沿順時針移動,所述外傳送帶沿逆時針移動,所述第一傳送部帶動所述第一整定機(jī)構(gòu)沿所述第二方向的反方向移動,所述第二傳送部帶動所述第二整定機(jī)構(gòu)沿所述第三方向移動,所述第三傳送部帶動所述第六整定機(jī)構(gòu)沿所述第二方向移動,所述第四傳送部帶動所述第三整定機(jī)構(gòu)沿所述第二方向移動,所述第五傳送部帶動所述第四整定機(jī)構(gòu)沿所述第三方向的反方向移動;所述第六傳送部帶動所述第五整定機(jī)構(gòu)沿所述第二方向的反方向移動。
18、其中,所述第一整定機(jī)構(gòu)包括第一連接件、第一壓板、第一調(diào)節(jié)塊、第二調(diào)節(jié)塊、第一導(dǎo)桿和第二導(dǎo)桿,所述第一連接件連接所述第一導(dǎo)軌,所述第一壓板分別連接所述第一連接件和所述第一傳送部,所述第一調(diào)節(jié)塊和所述第二調(diào)節(jié)塊設(shè)于所述第一連接件上,且所述第一調(diào)節(jié)塊和所述第二調(diào)節(jié)塊沿所述第三方向依次設(shè)置,所述第一導(dǎo)桿設(shè)于所述第一調(diào)節(jié)塊上,所述第二導(dǎo)桿設(shè)于所述第二調(diào)節(jié)塊上,所述第一導(dǎo)桿和所述第二導(dǎo)桿用于抵接并限位所述晶圓;
19、所述第一調(diào)節(jié)塊和所述第二調(diào)節(jié)塊設(shè)有第一腰型孔,所述第一調(diào)節(jié)塊和所述第二調(diào)節(jié)塊通過所述第一腰型孔和所述第一連接件固定連接。
20、其中,所述第一導(dǎo)桿包括主體部、弧形過渡部及延伸部,所述延伸部的徑向尺寸大于所述主體部,所述弧形過渡部的徑向尺寸從所述主體部至所述延伸部逐漸增大。
21、其中,所述吸平模組包括間隔設(shè)置的第一吸平機(jī)構(gòu)和第二吸平機(jī)構(gòu),所述第一吸平機(jī)構(gòu)和所述第二吸平機(jī)構(gòu)設(shè)于所述底板背離所述承載板的一側(cè);
22、所述第一吸平機(jī)構(gòu)包括第一升降氣缸、第一固定組件、第一吸平件和第二吸平件,所述第一升降氣缸用于帶動所述第一固定組件沿所述第一方向移動,所述第一吸平件和所述第二吸平件設(shè)于所述第一固定組件的兩端,且所述第一吸平件和所述第二吸平件穿設(shè)所述底板和所述承載板,所述第一吸平件和所述第二吸平件用于吸附所述晶圓;
23、所述第二吸平機(jī)構(gòu)包括第二升降氣缸、第二固定組件、第三吸平件和第四吸平件,所述第二升降氣缸用于帶動所述第二固定組件沿所述第一方向移動,所述第三吸平件和所述第四吸平件設(shè)于所述第二固定組件的兩端,且所述第三吸平件和所述第四吸平件穿設(shè)所述底板和所述承載板,所述第三吸平件和所述第四吸平件用于吸附所述晶圓。
24、其中,所述旋轉(zhuǎn)機(jī)構(gòu)包括旋轉(zhuǎn)組件和吸盤組件,所述旋轉(zhuǎn)組件設(shè)于所述底板背離所述承載板的一側(cè),所述旋轉(zhuǎn)組件用于帶動所述吸盤組件轉(zhuǎn)動,所述吸盤組件沿所述第一方向延伸且穿設(shè)所述底板和承載板,所述吸盤組件用于承載并吸附所述晶圓;
25、所述吸盤組件包括吸盤座、吸盤主體及多個吸盤,所述吸盤座和所述吸盤主體連接形成連通所述多個吸盤的吸氣通道,所述吸盤主體設(shè)有多個收容槽,所述多個收容槽用于放置所述吸盤,在所述第一方向上,所述吸盤的高度高于所述吸盤主體的高度,以將所述晶圓吸附緊貼所述吸盤主體。
26、第二方面,本技術(shù)提供了一種吸平整定方法,應(yīng)用于所述吸平整定結(jié)構(gòu),所述吸平整定方法包括:
27、控制所述升降旋轉(zhuǎn)模組從第一位置沿第一方向移動至第二位置,用于吸附承載所述晶圓;
28、控制所述升降旋轉(zhuǎn)模組沿所述第一方向的反方向移動至第三位置;
29、控制所述吸平模組沿所述第一方向移動至第一吸平位置,用于吸附所述升降旋轉(zhuǎn)模組上的所述晶圓;
30、控制所述升降旋轉(zhuǎn)模組在所述吸平模組吸附所述晶圓后沿所述第一方向的反方向移動至所述第一位置;
31、控制所述吸平模組從所述第一吸平位置沿所述第一方向的反方向移動至第二吸平位置,用于使所述晶圓吸平于所述承載板上;
32、控制掃碼裝置在所述晶圓吸平于所述承載板之后對所述晶圓進(jìn)行掃碼;
33、控制所述整定模組的整定機(jī)構(gòu)沿靠近所述升降旋轉(zhuǎn)模組的所在側(cè)移動至第一整定位置;
34、控制所述吸平模組在所述整定機(jī)構(gòu)移動至所述第一整定位置后釋放所述晶圓;
35、控制所述整定模組的整定機(jī)構(gòu)移動至所述第二整定位置,用于整定所述晶圓。
36、第三方面,本技術(shù)提供了一種晶圓檢測裝置,包括運輸結(jié)構(gòu)及所述的吸平整定結(jié)構(gòu),所述運輸結(jié)構(gòu)用于將所述晶圓運輸至所述吸平整定結(jié)構(gòu)或?qū)⑺鑫秸ńY(jié)構(gòu)上的所述晶圓移出。
37、本技術(shù)提供的晶圓檢測裝置中,承載板設(shè)于底板上且和底板間隔設(shè)置,升降旋轉(zhuǎn)模組設(shè)于底板上,升降旋轉(zhuǎn)模組包括旋轉(zhuǎn)機(jī)構(gòu)和升降機(jī)構(gòu),旋轉(zhuǎn)機(jī)構(gòu)用于承載晶圓并帶動晶圓相對底板轉(zhuǎn)動,升降機(jī)構(gòu)用于承載旋轉(zhuǎn)機(jī)構(gòu),并帶動旋轉(zhuǎn)機(jī)構(gòu)沿第一方向往復(fù)移動。吸平模組設(shè)于底板上,吸平模組至少部分穿設(shè)承載板和底板,吸平模組用于承載并吸平晶圓,吸平模組能夠沿第一方向往復(fù)移動,以將晶圓吸平設(shè)于承載板上。整定模組設(shè)于底板上,整定模組包括第一整定機(jī)構(gòu)、第二整定機(jī)構(gòu)、第三整定機(jī)構(gòu)和第四整定機(jī)構(gòu),第一整定機(jī)構(gòu)、第二整定機(jī)構(gòu)、第三整定機(jī)構(gòu)和第四整定機(jī)構(gòu)環(huán)繞承載板設(shè)置且分別設(shè)于承載板的四周,第一整定機(jī)構(gòu)、第二整定機(jī)構(gòu)、第三整定機(jī)構(gòu)和第四整定機(jī)構(gòu)皆可用于沿靠近承載板中心的所在側(cè)移動,以將承載板上的晶圓進(jìn)行整定。吸平模組能夠帶動晶圓沿第一方向的反方向移動,以將晶圓吸平的放置于承載板上,能夠保證晶圓的平整性,方便對于晶圓進(jìn)行預(yù)對準(zhǔn)的定位、掃碼等操作;整定模組能夠?qū)Τ休d板上的晶圓進(jìn)行整定,使較大尺寸的晶圓實現(xiàn)居中,能夠有效地校正晶圓的位置,并方便后續(xù)對晶圓的運輸及檢測等步驟。
- 還沒有人留言評論。精彩留言會獲得點贊!