一種Ethercat的伺服驅動器的制作方法
本技術涉及工業自動化,尤其涉及一種ethercat的伺服驅動器。
背景技術:
1、在工業自動化領域,特別的多軸電機驅動器的應用場景中,ethercat總線因為其傳輸速率高(100mbps)、通信周期短,同步精度高,電氣拓撲簡潔,接線簡單等特點,得到大量的應用。
2、ethercat是由德國倍福公司提出的一種通信技術,它是基于標準的以太網技術,具備靈活的網絡拓撲結構。ethercat采用主從式結構,主站pc機采用標準的以太網卡,從站采用專用的fpga。因為需要在以往的伺服驅動器的硬件的基礎上增加了一個fpga,因此使得符合ethercat標準的伺服驅動器體積都是比較巨大。在一些機器人、醫療設備等體積受限的場合時,不能很好地滿足應用。
技術實現思路
1、本實用新型的目的是為了實現了一種小體積的多應用場合,滿足當前總線的需求的伺服驅動器,而提出的一種ethercat的伺服驅動器。
2、為了實現上述目的,本實用新型采用了如下技術方案:
3、一種ethercat的伺服驅動器,包括:
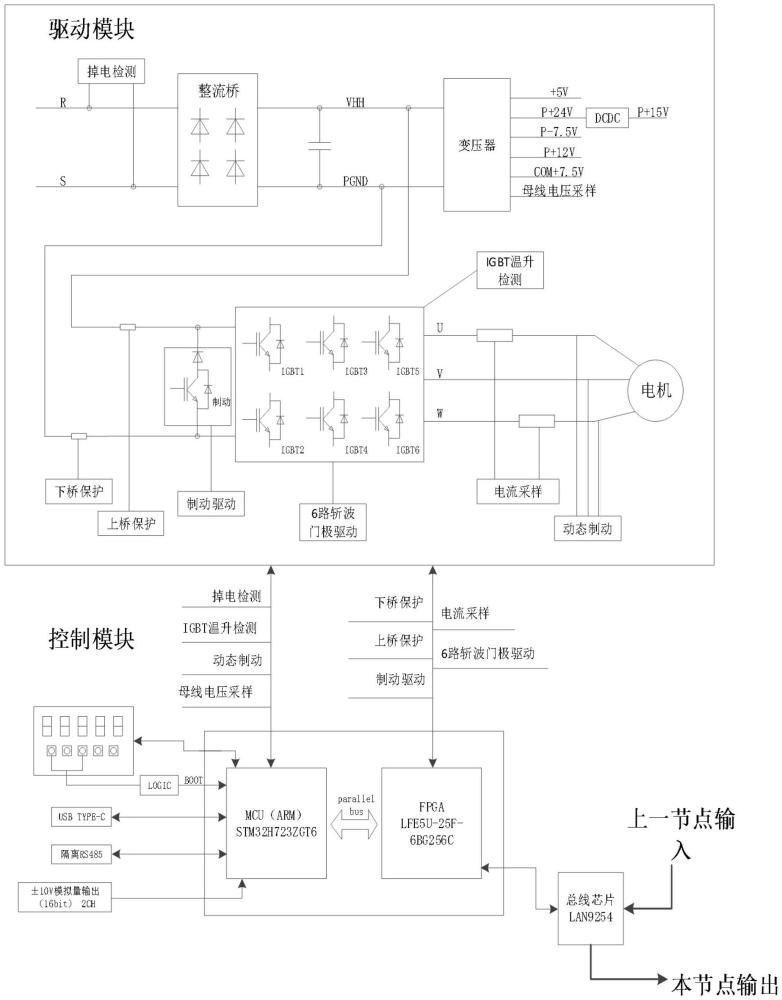
4、控制模塊、驅動模塊;所述控制模塊包括mcu、fpga、總線芯片、邏輯控制單元、通信接口;所述驅動模塊包括電流采樣模塊、動態制動模塊、igbt溫升檢測模塊、6路斬波門極驅動模塊、制動驅動模塊、下橋保護模塊、上橋保護模塊、掉電檢測模塊、母線電壓采樣模塊;
5、所述mcu與所述fpga相互連接;所述fpga連接所述總線芯片;所述mcu分別與邏輯控制單元、通信接口連接;所述mcu還與所述母線電壓采樣模塊、動態制動模塊、igbt溫升檢測模塊、掉電檢測模塊連接;所述fpga與電流采樣模塊、制動驅動模塊、下橋保護模塊、上橋保護模塊、6路斬波門極驅動模塊連接;所述驅動模塊還包括變壓器,所述變壓器為平面變壓器。
6、優選的,所述驅動模塊包括電機;所述電機與動態制動模塊連接,所述動態制動模塊與電流采樣模塊連接,所述電流采樣模塊與所述6路斬波門極驅動模塊、igbt溫升檢測模塊連接,所述6路斬波門極驅動模塊與制動驅動模塊連接,所述制動驅動模塊分別與所述下橋保護模塊、上橋保護模塊連接。
7、優選的,所述驅動模塊包括平面變壓器;所述平面變壓器與所述下橋保護模塊、上橋保護模塊連接,所述平面變壓器與母線電壓采樣模塊連接。
8、優選的,所述驅動模塊包括整流橋;所述整流橋與所述變壓器連接,所述整流橋與掉電檢測模塊連接。
9、優選的,所述整流橋包括二極管d1、二極管d2、二極管d3、二極管d4、電容c2;所述二極管d1及二極管d3形成第一串聯支路,所述二極管d2及二極管d4形成第一串聯支路,所述第一串聯支路、第二串聯支路與電容c2并聯。
10、優選的,所述伺服驅動器包括ac電源,所述ac電源的r端子和s端子分別與所述第一串聯支路、第二串聯支路連接。
11、優選的,所述ethercat的伺服驅動器還設置有靜電釋放電路。
12、優選的,所述靜電釋放電路包括io端子連接器、pcb走線、硬接線;所述io端子連接器連接所述pcb走線、硬接線,所述硬接線接地。
13、優選的,所述伺服驅動器的數量是多個的,所述總線芯片接收到上一個伺服驅動器節點傳輸的數據,發送至下一個伺服驅動器,形成多節點級聯。
14、與現有技術相比,
15、本實用新型實施例中,該ethercat的伺服驅動器包括控制模塊、驅動模塊;所述控制模塊包括mcu、fpga、總線芯片、邏輯控制單元、通信接口;所述驅動模塊包括電流采樣模塊、動態制動模塊、igbt溫升檢測模塊、6路斬波門極驅動模塊、制動驅動模塊、下橋保護模塊、上橋保護模塊、掉電檢測模塊、母線電壓采樣模塊;所述mcu與所述fpga相互連接;所述fpga連接所述總線芯片;所述mcu分別與邏輯控制單元、通信接口連接;所述mcu還與所述母線電壓采樣模塊、動態制動模塊、igbt溫升檢測模塊、掉電檢測模塊連接;所述fpga與電流采樣模塊、制動驅動模塊、下橋保護模塊、上橋保護模塊、6路斬波門極驅動模塊連接;所述驅動模塊還包括變壓器,所述變壓器為平面變壓器;通過所述的平面變壓器,得益于平面變壓器的小體積,因此使得整個驅動器的體積都大大減小,從而實現了一種低成本、小體積的多應用場合,滿足當前ethercat總線的需求的伺服驅動器。
技術特征:
1.一種ethercat的伺服驅動器,其特征在于,包括:
2.根據權利要求1所述的ethercat的伺服驅動器,其特征在于,所述驅動模塊包括電機;所述電機與動態制動模塊連接,所述動態制動模塊與電流采樣模塊連接,所述電流采樣模塊與所述6路斬波門極驅動模塊、igbt溫升檢測模塊連接,所述6路斬波門極驅動模塊與制動驅動模塊連接,所述制動驅動模塊分別與所述下橋保護模塊、上橋保護模塊連接。
3.根據權利要求2所述的ethercat的伺服驅動器,其特征在于,所述驅動模塊包括平面變壓器;所述平面變壓器與所述下橋保護模塊、上橋保護模塊連接,所述平面變壓器與母線電壓采樣模塊連接。
4.根據權利要求3所述的ethercat的伺服驅動器,其特征在于,所述驅動模塊包括整流橋;所述整流橋與所述變壓器連接,所述整流橋與掉電檢測模塊連接。
5.根據權利要求4所述的ethercat的伺服驅動器,其特征在于,所述整流橋包括二極管d1、二極管d2、二極管d3、二極管d4、電容c2;所述二極管d1及二極管d3形成第一串聯支路,所述二極管d2及二極管d4形成第一串聯支路,所述第一串聯支路、第二串聯支路與電容c2并聯。
6.根據權利要求5所述的ethercat的伺服驅動器,其特征在于,所述伺服驅動器包括ac電源,所述ac電源的r端子和s端子分別與所述第一串聯支路、第二串聯支路連接。
7.根據權利要求3所述的ethercat的伺服驅動器,其特征在于,所述ethercat的伺服驅動器還設置有靜電釋放電路。
8.根據權利要求7所述的ethercat的伺服驅動器,其特征在于,所述靜電釋放電路包括io端子連接器、pcb走線、硬接線;所述io端子連接器連接所述pcb走線、硬接線,所述硬接線接地。
9.根據權利要求7所述的ethercat的伺服驅動器,其特征在于,所述伺服驅動器的數量是多個的,所述總線芯片接收到上一個伺服驅動器節點傳輸的數據,發送至下一個伺服驅動器,形成多節點級聯。
技術總結
本技術涉及一種Ethercat的伺服驅動器,包括控制模塊、驅動模塊;所述MCU與所述FPGA相互連接;所述FPGA連接所述總線芯片;所述MCU分別與邏輯控制單元、通信接口連接;所述MCU還與所述母線電壓采樣模塊、動態制動模塊、IGBT溫升檢測模塊、掉電檢測模塊連接;所述FPGA與電流采樣模塊、制動驅動模塊、下橋保護模塊、上橋保護模塊、6路斬波門極驅動模塊連接;所述驅動模塊還包括變壓器,所述變壓器為平面變壓器;實現了一種低成本、小體積的多應用場合,滿足當前Ethercat總線的需求的伺服驅動器。
技術研發人員:曾錦波,丁信忠
受保護的技術使用者:深圳眾為興技術股份有限公司
技術研發日:20240623
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!