一種基于智能調(diào)速控制的充電式無刷電動打草機控制方法
本發(fā)明涉及電機控制,特別是指一種基于智能調(diào)速控制的充電式無刷電動打草機控制方法。
背景技術(shù):
1、當前充電式無刷電動打草機的控制技術(shù)在實際應用中存在多方面不足,難以滿足復雜作業(yè)場景的需求。首先,現(xiàn)有調(diào)速方法過度依賴單一傳感器(如轉(zhuǎn)速或電流監(jiān)測),缺乏對振動、扭矩、溫度等多維度參數(shù)的融合分析。在面對植被密度突變、雜草纏繞刀片或地面硬物遮擋時,系統(tǒng)無法精準識別機械負載的動態(tài)變化,導致調(diào)速響應滯后。例如,當?shù)镀蝗豢ㄈ胗参飳е屡ぞ伢E增時,傳統(tǒng)方法因未結(jié)合三軸振動數(shù)據(jù)的聯(lián)合分析,可能誤判為植被硬度變化而繼續(xù)維持高轉(zhuǎn)速運行,導致電機過載甚至燒毀。另一方面,電池能量管理的粗放性限制了設(shè)備效率,現(xiàn)有技術(shù)缺乏對能量轉(zhuǎn)化過程的動態(tài)建模,尤其在電池溫升、內(nèi)阻變化等工況下,未建立能量分配效率的實時評估機制,導致高溫或低電量狀態(tài)下大量電能被無效耗散,電池循環(huán)壽命顯著縮短,且續(xù)航能力隨著使用環(huán)境變化波動嚴重。
2、在控制算法層面,主流的單閉環(huán)pid調(diào)速方案存在原理性缺陷。當負載頻繁波動或作業(yè)強度快速變化時(如從松軟草坪切換至灌木叢),積分項的累積效應會導致輸出飽和,引發(fā)轉(zhuǎn)速劇烈震蕩或超調(diào),影響切割均勻性。實踐中,當植被密度變化超過30%時,轉(zhuǎn)速恢復至目標值的時間常超過2秒,不僅降低了作業(yè)效率,還易因轉(zhuǎn)速不一致導致植被殘留或刀片空轉(zhuǎn)磨損。此外,傳統(tǒng)pwm占空比調(diào)節(jié)依賴固定規(guī)則庫,未將電池剩余容量(soc)與當前作業(yè)模式動態(tài)關(guān)聯(lián)。例如,在低電量階段,現(xiàn)有技術(shù)多采用階梯式強制降速策略,當soc低于20%時直接將轉(zhuǎn)速限制為基準值的50%,忽視了剩余作業(yè)時間、植被硬度差異對能耗速率的影響,可能造成關(guān)鍵任務(wù)未完成前電量耗盡,或在高硬度植被場景下因功率不足導致作業(yè)中斷,迫使用戶頻繁充電。
3、長期使用場景下的自適應能力缺失進一步暴露了系統(tǒng)短板。現(xiàn)有控制參數(shù)多為出廠固化配置,缺乏對刀片磨損、軸承老化、季節(jié)溫差等動態(tài)因素的適應性調(diào)整。隨著設(shè)備使用時長增加,刀片鋒利度下降會導致相同作業(yè)強度下扭矩需求攀升,而系統(tǒng)未能通過振動頻譜分析動態(tài)修正負載特征參數(shù),持續(xù)沿用原始控制邏輯將加速電機損耗。同時,不同植被類型(如硬質(zhì)灌木與細軟雜草)的切割阻力差異高達數(shù)倍,傳統(tǒng)方法未建立作業(yè)模式的自學習機制,依賴手動切換預設(shè)擋位,操作繁瑣且易因誤選擋位導致效率低下或設(shè)備超負荷運行。
4、異常工況的處理機制也亟待優(yōu)化。現(xiàn)有技術(shù)對刀片卡滯、電機過熱等問題的檢測主要依賴單參數(shù)閾值觸發(fā),例如僅通過電流峰值判定卡滯,但忽略了扭矩與振動的關(guān)聯(lián)特征,檢測延遲常超過200毫秒。在此期間,刀片可能已因持續(xù)堵轉(zhuǎn)導致局部高溫,甚至引發(fā)塑料部件變形。更嚴重的是,當振動幅值超過安全范圍時,多數(shù)系統(tǒng)僅觸發(fā)警示音而未能聯(lián)動降速保護,操作人員在緊急情況下可能因反應不及時導致設(shè)備損壞或安全隱患。此外,電池健康狀態(tài)的監(jiān)測手段單一化,僅通過電壓跌落判斷老化程度,未能結(jié)合溫升速率、內(nèi)阻變化等多維度參數(shù)預測電池剩余壽命,導致用戶無法提前預判電池失效風險。
5、上述缺陷的綜合作用使得現(xiàn)有電動打草機在能效利用、工況適應性及長期可靠性方面存在顯著短板,亟需通過多源數(shù)據(jù)融合、動態(tài)效能優(yōu)化及智能決策算法實現(xiàn)系統(tǒng)性升級,從而提升復雜環(huán)境下的作業(yè)品質(zhì)與設(shè)備耐用性。
技術(shù)實現(xiàn)思路
1、為了解決現(xiàn)有技術(shù)中多維度參數(shù)融合能力不足導致的機械負載識別滯后、能量轉(zhuǎn)化效率動態(tài)評估缺失引發(fā)的續(xù)航穩(wěn)定性差、單閉環(huán)控制算法積分飽和引發(fā)的調(diào)速振蕩、低電量階段固定降速模式與作業(yè)需求失配、長期運行參數(shù)固化導致的自適應能力缺失及異常工況聯(lián)動處置機制不完善的技術(shù)問題,本發(fā)明提供了一種基于智能調(diào)速控制的充電式無刷電動打草機控制方法。
2、本發(fā)明提供的技術(shù)方案如下:
3、本發(fā)明提供的一種基于智能調(diào)速控制的充電式無刷電動打草機控制方法,包括:
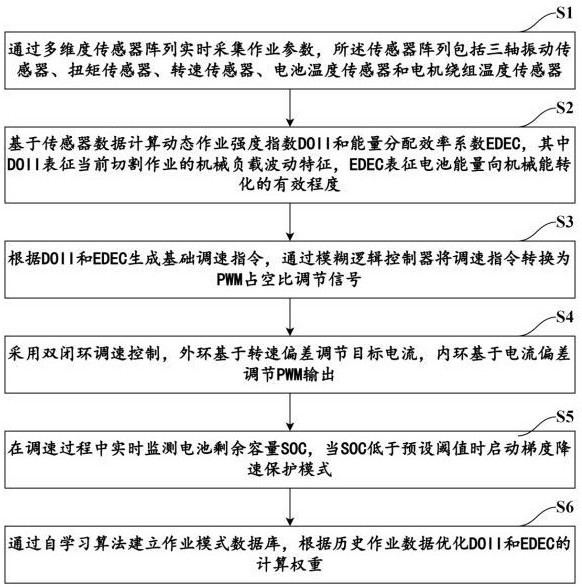
4、s1、通過多維度傳感器陣列實時采集作業(yè)參數(shù),所述傳感器陣列包括三軸振動傳感器、扭矩傳感器、轉(zhuǎn)速傳感器、電池溫度傳感器和電機繞組溫度傳感器;
5、s2、基于傳感器數(shù)據(jù)計算動態(tài)作業(yè)強度指數(shù)doii和能量分配效率系數(shù)edec,其中doii表征當前切割作業(yè)的機械負載波動特征,edec表征電池能量向機械能轉(zhuǎn)化的有效程度;
6、s3、根據(jù)doii和edec生成基礎(chǔ)調(diào)速指令,通過模糊邏輯控制器將調(diào)速指令轉(zhuǎn)換為pwm占空比調(diào)節(jié)信號;
7、s4、采用雙閉環(huán)調(diào)速控制,外環(huán)基于轉(zhuǎn)速偏差調(diào)節(jié)目標電流,內(nèi)環(huán)基于電流偏差調(diào)節(jié)pwm輸出;
8、s5、在調(diào)速過程中實時監(jiān)測電池剩余容量soc,當soc低于預設(shè)閾值時啟動梯度降速保護模式;
9、s6、通過自學習算法建立作業(yè)模式數(shù)據(jù)庫,根據(jù)歷史作業(yè)數(shù)據(jù)優(yōu)化doii和edec的計算權(quán)重;
10、其中所述梯度降速保護模式包括三級降速策略,每級降速幅度與當前轉(zhuǎn)速及剩余作業(yè)時間呈非線性關(guān)系。
11、本發(fā)明提供的技術(shù)方案帶來的有益效果至少包括:
12、(1)在本發(fā)明中,通過集成多維度傳感器實時采集作業(yè)參數(shù),并計算動態(tài)作業(yè)強度指數(shù)doii和能量分配效率系數(shù)edec,解決了傳統(tǒng)電動打草機在復雜作業(yè)環(huán)境下無法精準調(diào)控電機轉(zhuǎn)速的問題。這一技術(shù)手段使得打草機能夠根據(jù)實時負載和能量轉(zhuǎn)化效率智能調(diào)整輸出,有效避免了過載和能源浪費,顯著提高了作業(yè)效率和電池續(xù)航能力;
13、(2)在本發(fā)明中,采用雙閉環(huán)調(diào)速控制系統(tǒng),結(jié)合改進型pid算法,本發(fā)明實現(xiàn)了對電機轉(zhuǎn)速和電流的精確控制。外環(huán)基于轉(zhuǎn)速偏差調(diào)節(jié)目標電流,內(nèi)環(huán)基于電流偏差調(diào)節(jié)pwm輸出,這種雙重保障有效提升了系統(tǒng)的動態(tài)響應速度和穩(wěn)定性。通過抑制積分飽和現(xiàn)象,進一步增強了系統(tǒng)的魯棒性,解決了傳統(tǒng)調(diào)速系統(tǒng)在復雜工況下易出現(xiàn)的振蕩和失控問題;
14、(3)在本發(fā)明中,引入了自學習算法和梯度降速保護模式,通過深度q網(wǎng)絡(luò)dqn架構(gòu)不斷優(yōu)化控制策略,并根據(jù)電池剩余容量soc智能調(diào)整轉(zhuǎn)速,有效延長了電池使用壽命和作業(yè)時間。同時,梯度降速保護模式在電池電量不足時自動啟動,通過三級降速策略平滑降低轉(zhuǎn)速,避免了因突然斷電導致的作業(yè)中斷和設(shè)備損壞,顯著提升了電動打草機的可靠性和用戶滿意度。
技術(shù)特征:
1.一種基于智能調(diào)速控制的充電式無刷電動打草機控制方法,其特征在于,包括:
2.根據(jù)權(quán)利要求1所述的一種基于智能調(diào)速控制的充電式無刷電動打草機控制方法,其特征在于,步驟s4所述雙閉環(huán)調(diào)速控制中包括:
3.根據(jù)權(quán)利要求1所述的一種基于智能調(diào)速控制的充電式無刷電動打草機控制方法,其特征在于,包括:
4.根據(jù)權(quán)利要求1所述的一種基于智能調(diào)速控制的充電式無刷電動打草機控制方法,其特征在于,步驟s2中包括:
5.根據(jù)權(quán)利要求1所述的一種基于智能調(diào)速控制的充電式無刷電動打草機控制方法,其特征在于,步驟s3所述模糊邏輯控制器包括:
6.根據(jù)權(quán)利要求1所述的一種基于智能調(diào)速控制的充電式無刷電動打草機控制方法,其特征在于,步驟s5所述梯度降速保護模式包括:
7.根據(jù)權(quán)利要求1所述的一種基于智能調(diào)速控制的充電式無刷電動打草機控制方法,其特征在于,步驟s6所述自學習算法包括:
8.根據(jù)權(quán)利要求3所述的一種基于智能調(diào)速控制的充電式無刷電動打草機控制方法,其特征在于,包括:
9.根據(jù)權(quán)利要求4所述的一種基于智能調(diào)速控制的充電式無刷電動打草機控制方法,其特征在于,所述熱耗散系數(shù)k包括:
10.根據(jù)權(quán)利要求1所述的一種基于智能調(diào)速控制的充電式無刷電動打草機控制方法,其特征在于,還包括異常工況處理策略:
技術(shù)總結(jié)
本發(fā)明提供一種基于智能調(diào)速控制的充電式無刷電動打草機控制方法,涉及電機控制技術(shù)領(lǐng)域。該方法通過多維度傳感器實時采集作業(yè)參數(shù),如振動、扭矩、轉(zhuǎn)速及溫度等,進而計算動態(tài)作業(yè)強度指數(shù)DOII和能量分配效率系數(shù)EDEC。基于這兩項指標,利用模糊邏輯控制器生成基礎(chǔ)調(diào)速指令,并通過雙閉環(huán)調(diào)速系統(tǒng)實現(xiàn)精準控制,確保電機運行高效且穩(wěn)定。在電池電量不足時,本發(fā)明采用梯度降速保護模式,有效延長作業(yè)時間并保護電池健康。此外,該方法還具備自學習能力,可根據(jù)歷史作業(yè)數(shù)據(jù)不斷優(yōu)化控制策略。本發(fā)明不僅提升了電動打草機的作業(yè)效率和能源利用率,還顯著增強了其智能化水平和用戶友好性,為園藝工具領(lǐng)域帶來了創(chuàng)新性的技術(shù)解決方案。
技術(shù)研發(fā)人員:陸勇星,徐明輝
受保護的技術(shù)使用者:金華職業(yè)技術(shù)大學
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!