物品搬運裝置、臺車及臺車與牽引裝置的連結方法與流程
本說明書公開了涉及物品搬運裝置、臺車及臺車與牽引裝置的連結方法的技術。
背景技術:
1、專利文獻1所記載的搬運車具備第一移載裝置和行駛裝置。搬運車借助行駛裝置向目標站移動,借助第一移載裝置向目標站送出物品或收容箱。另外,搬運車也能夠通過第一移載裝置從目標站接收物品或收容箱。
2、專利文獻2所記載的抬起機構能夠具備在機器人與工具之間提供電連接、光學連接或者機械連接的一個或者多個耦合器。另外,抬起機構使機器人與工具通信而向工具供給電力,進行與工具的連結等。
3、現(xiàn)有技術文獻
4、專利文獻
5、專利文獻1:國際公開第2021/144866號
6、專利文獻2:日本特開2018-513817號公報
技術實現(xiàn)思路
1、發(fā)明所要解決的課題
2、但是,在專利文獻1中,關于第一移載裝置及行駛裝置之間的具體的連結形態(tài)沒有記載。另外,在專利文獻2中,未明示機器人與工具之間的定位、連結及電連接的聯(lián)動。
3、鑒于這樣的情況,本說明書公開了能夠使臺車與牽引裝置之間的定位、連結及電連接聯(lián)動的物品搬運裝置、臺車及臺車與牽引裝置的連結方法。
4、用于解決課題的手段
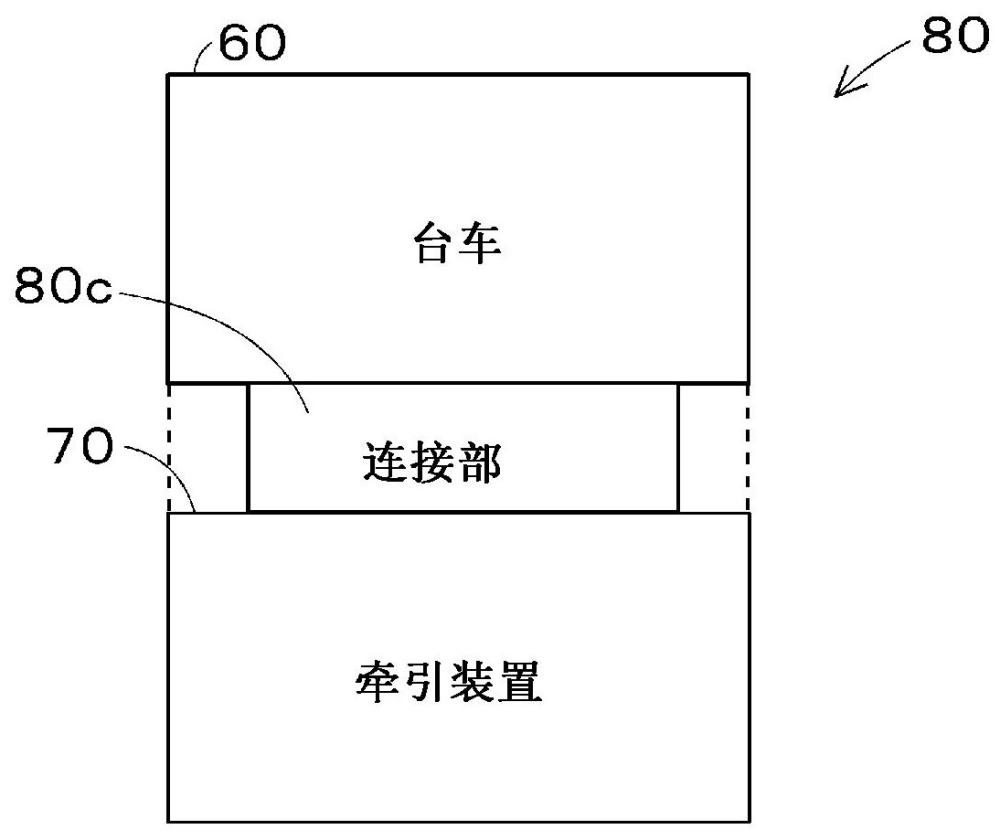
5、本說明書公開一種具備臺車、牽引裝置及連接部的物品搬運裝置。所述臺車搬運在對基板進行預定的對基板作業(yè)的對基板作業(yè)機中使用的物品。所述牽引裝置牽引所述臺車。所述連接部隨著所述臺車與所述牽引裝置之間的定位和連接而將所述臺車與所述牽引裝置之間電連接。
6、另外,本說明書公開一種具備交接機構、連結機構及連接部的臺車。所述交接機構進行在對基板進行預定的對基板作業(yè)的對基板作業(yè)機中使用的物品的交接。所述連接機構能夠與牽引裝置之間機械連接。所述連接部能夠與所述牽引裝置之間電連接,并隨著與所述牽引裝置之間的定位及連結而與所述牽引裝置電連接。
7、并且,本說明書公開了一種臺車與牽引裝置的連結方法,該臺車搬運在對基板進行預定的對基板作業(yè)的對基板作業(yè)機中使用的物品,該牽引裝置能夠牽引所述臺車而沿著行駛路徑自動地移動。所述小車與所述牽引裝置的連接方法包括第一定位步驟和連結連接步驟。在所述第一定位工序中,對所述臺車進行第一階段的定位。在所述連結連接工序中,在進行了所述第一定位工序之后,使移動機構工作而進行機械定位及連結,隨著所述臺車與所述牽引裝置之間的定位及連結而將所述臺車與所述牽引裝置之間電連接。
8、此外,在本說明書中,公開了在申請書中最初附加的技術方案(以下,稱為最初技術方案)所記載的技術方案6中將“技術方案2所記載的物品搬運裝置”變更為“技術方案2至5中任一項所記載的物品搬運裝置”的技術思想。另外,在本說明書中,公開了在最初技術方案所記載的技術方案8中將“技術方案2所記載的物品搬運裝置”變更為“技術方案2至7中任一項所記載的物品搬運裝置”的技術思想。
9、發(fā)明效果
10、根據(jù)上述的物品搬運裝置,能夠隨著臺車與牽引裝置之間的定位及連結而將臺車與牽引裝置之間電連接。關于物品搬運裝置的上述內容,對于臺車及臺車與牽引裝置的連結方法也是同樣的。
技術特征:
1.一種物品搬運裝置,具備:
2.根據(jù)權利要求1所述的物品搬運裝置,其中,
3.根據(jù)權利要求2所述的物品搬運裝置,其中,
4.根據(jù)權利要求3所述的物品搬運裝置,其中,
5.根據(jù)權利要求3所述的物品搬運裝置,其中,
6.根據(jù)權利要求2所述的物品搬運裝置,其中,
7.根據(jù)權利要求6所述的物品搬運裝置,其中,
8.根據(jù)權利要求2所述的物品搬運裝置,其中,
9.一種臺車,具備:
10.根據(jù)權利要求9所述的臺車,其中,
11.一種臺車與牽引裝置的連結方法,所述臺車搬運在對基板進行預定的對基板作業(yè)的對基板作業(yè)機中使用的物品,所述牽引裝置能夠牽引所述臺車而沿著行駛路徑自動地移動,
技術總結
物品搬運裝置具備臺車、牽引裝置和連接部。臺車搬運在對基板進行預定的對基板作業(yè)的對基板作業(yè)機中使用的物品。牽引裝置牽引臺車。連接部隨著臺車與牽引裝置之間的定位和連結而將臺車與牽引裝置之間電連接。
技術研發(fā)人員:藤田佳宏
受保護的技術使用者:株式會社富士
技術研發(fā)日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!