一種電力自動(dòng)化設(shè)備遠(yuǎn)程監(jiān)控裝置的制作方法
本發(fā)明涉及電力自動(dòng)化領(lǐng)域,具體是一種電力自動(dòng)化設(shè)備遠(yuǎn)程監(jiān)控裝置。
背景技術(shù):
1、電力系統(tǒng)自動(dòng)化對(duì)電能生產(chǎn)、傳輸和管理實(shí)現(xiàn)自動(dòng)控制、自動(dòng)調(diào)度和自動(dòng)化管理。電力系統(tǒng)?是一個(gè)地域分布遼闊,由發(fā)電廠、變電站、輸配電網(wǎng)絡(luò)和用戶組成的統(tǒng)一調(diào)度和運(yùn)行的復(fù)雜大系統(tǒng)。
2、電力系統(tǒng)自動(dòng)化的領(lǐng)域包括生產(chǎn)過程的自動(dòng)檢測(cè)、調(diào)節(jié)和控制,系統(tǒng)和元件的自動(dòng)安全保護(hù),網(wǎng)絡(luò)信息的自動(dòng)傳輸,系統(tǒng)生產(chǎn)的自動(dòng)調(diào)度,以及企業(yè)的自動(dòng)化經(jīng)濟(jì)管理等。電力系統(tǒng)自動(dòng)化的主要目標(biāo)是保證供電的電能質(zhì)量(頻率和電壓),保證系統(tǒng)運(yùn)行的安全可靠,提高經(jīng)濟(jì)效益和管理效能。
3、在電力自動(dòng)化設(shè)備的監(jiān)控過程中,通常使用攝像頭對(duì)現(xiàn)場(chǎng)畫面進(jìn)行監(jiān)測(cè),而傳統(tǒng)的監(jiān)控裝置多采用固定式的攝像頭,這樣在實(shí)際使用過程中,攝像頭難免會(huì)存在死角,雖然現(xiàn)在的攝像頭均帶有轉(zhuǎn)動(dòng)功能,但范圍有限,從而會(huì)影響操作人員獲取異常信息的時(shí)效性。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明的目的在于提供一種電力自動(dòng)化設(shè)備遠(yuǎn)程監(jiān)控裝置,以解決上述問題。
2、為實(shí)現(xiàn)上述目的,本發(fā)明提供如下技術(shù)方案:
3、一種電力自動(dòng)化設(shè)備遠(yuǎn)程監(jiān)控裝置,包括:
4、控制中心;
5、監(jiān)控模塊,由多個(gè)監(jiān)控單元構(gòu)成,用于向控制中心傳輸現(xiàn)場(chǎng)的實(shí)時(shí)監(jiān)控畫面,每個(gè)所述監(jiān)控單元包括基座、安裝于基座上且可在基座平面上移動(dòng)的監(jiān)控?cái)z像頭以及用于驅(qū)動(dòng)監(jiān)控?cái)z像頭移動(dòng)的驅(qū)動(dòng)機(jī)構(gòu);
6、傳感器模塊,由多個(gè)用于檢測(cè)不同參數(shù)的傳感器構(gòu)成,用于檢測(cè)現(xiàn)場(chǎng)的環(huán)境參數(shù)以及電力設(shè)備的運(yùn)行參數(shù),多個(gè)所述傳感器對(duì)應(yīng)的位置信息記錄于所述控制中心;
7、當(dāng)至少一個(gè)所述傳感器檢測(cè)到的參數(shù)超過閾值時(shí),所述控制中心標(biāo)記該傳感器對(duì)應(yīng)的位置信息以獲取目標(biāo)區(qū)域,同時(shí)向所述驅(qū)動(dòng)機(jī)構(gòu)發(fā)出驅(qū)動(dòng)指令,以使至少一個(gè)所述監(jiān)控?cái)z像頭移動(dòng)至可以監(jiān)控到目標(biāo)區(qū)域的位置。
8、在上述技術(shù)方案的基礎(chǔ)上,本發(fā)明還提供以下可選技術(shù)方案:
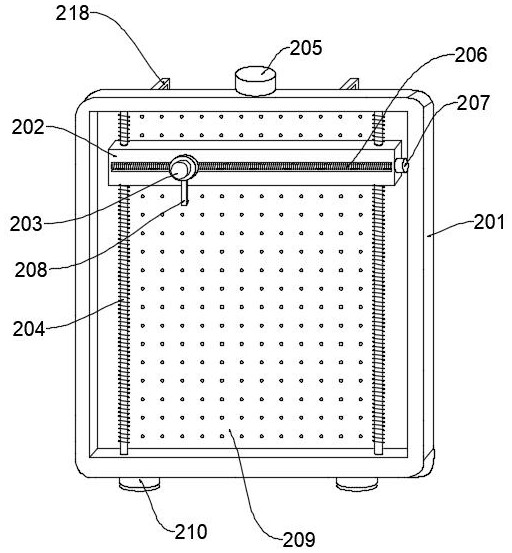
9、在進(jìn)一步的方案中:所述驅(qū)動(dòng)機(jī)構(gòu)包括移動(dòng)座和安裝座,其中所述移動(dòng)座滑動(dòng)設(shè)置在基座的正面凹槽中且能夠沿著豎向來(lái)回移動(dòng),所述基座的正面凹槽內(nèi)設(shè)置有與移動(dòng)座螺紋連接的豎向絲桿,所述豎向絲桿轉(zhuǎn)動(dòng)連接在基座的正面凹槽中,所述豎向絲桿由安裝于基座上的豎向驅(qū)動(dòng)電機(jī)驅(qū)動(dòng);所述監(jiān)控?cái)z像頭安裝在所述安裝座上,所述安裝座滑動(dòng)設(shè)置在移動(dòng)座的凹槽內(nèi)且能夠沿著橫向來(lái)回移動(dòng),所述移動(dòng)座的凹槽內(nèi)設(shè)置有與安裝座螺紋連接的橫向絲桿,所述橫向絲桿轉(zhuǎn)動(dòng)連接在轉(zhuǎn)動(dòng)座的凹槽中,所述橫向絲桿由安裝于移動(dòng)座上的橫向驅(qū)動(dòng)電機(jī)驅(qū)動(dòng)。
10、在進(jìn)一步的方案中:所述豎向絲桿設(shè)置有兩個(gè)且相對(duì)于基座的豎向?qū)ΨQ分布,所述豎向驅(qū)動(dòng)電機(jī)的輸出端通過傳動(dòng)皮帶與兩個(gè)所述豎向絲桿傳動(dòng)連接,即由豎向驅(qū)動(dòng)電機(jī)通過傳動(dòng)皮帶帶動(dòng)豎向絲桿轉(zhuǎn)動(dòng)。
11、在進(jìn)一步的方案中:所述安裝座上還固定有指示桿,所述基座?的正面凹槽內(nèi)設(shè)置有與指示桿相對(duì)應(yīng)的標(biāo)識(shí)。
12、在進(jìn)一步的方案中:所述指示桿靠近基座的一端還固定有主動(dòng)磁塊,所述基座的背面設(shè)置有從動(dòng)磁塊,所述從動(dòng)磁塊滑動(dòng)設(shè)置在基座的背面凹槽中,所述主動(dòng)磁塊和所述從動(dòng)磁塊的相對(duì)面磁極相反,所述從動(dòng)磁塊呈方形且豎向和橫向位置上均固定有感應(yīng)器,所述基座的背面凹槽槽壁上固定有與感應(yīng)器相適配的感應(yīng)條,所述感應(yīng)條包括豎向感應(yīng)條和橫向感應(yīng)條,所述基座上還安裝有警報(bào)器,所述警報(bào)器與所述感應(yīng)器以及所述感應(yīng)條電性連接,當(dāng)所述感應(yīng)器移動(dòng)至與所述感應(yīng)條感應(yīng)的位置時(shí),所述警報(bào)器向所述控制中心發(fā)出報(bào)警信息。
13、在進(jìn)一步的方案中:所述基座與安裝面之間通過卡扣結(jié)構(gòu)連接,所述卡扣結(jié)構(gòu)包括固定于基座背面的子扣以及固定于安裝面的母扣。
14、在進(jìn)一步的方案中:所述母扣呈橫條狀且設(shè)置有多個(gè),多個(gè)所述母扣沿安裝面縱向分布。
15、在進(jìn)一步的方案中:所述母扣包括固定部和轉(zhuǎn)動(dòng)連接于固定部的轉(zhuǎn)動(dòng)部,所述固定部和轉(zhuǎn)動(dòng)部之間還連接有彈簧,所述轉(zhuǎn)動(dòng)部的中間位置一體成型有用于支撐子扣的支撐面;所述子扣的尾部一體成型有凸起,所述凸起的兩側(cè)為圓弧面,所述轉(zhuǎn)動(dòng)部的頂部設(shè)置有與凸起相對(duì)應(yīng)的導(dǎo)向面,所述導(dǎo)向面為圓弧面。
16、相較于現(xiàn)有技術(shù),本發(fā)明的有益效果如下:
17、本發(fā)明實(shí)施例中,通過設(shè)置由控制中心、監(jiān)控模塊和傳感器模塊構(gòu)成的監(jiān)控裝置,能夠在現(xiàn)場(chǎng)發(fā)生異常情況時(shí)保證工作人員能夠?qū)崟r(shí)獲取有效的監(jiān)控畫面,從而保障了工作安全性,避免由于盲區(qū)的存在影響操作人員獲取異常信息的時(shí)效性;通過設(shè)置由移動(dòng)座和安裝座構(gòu)成的驅(qū)動(dòng)機(jī)構(gòu),能夠?qū)崿F(xiàn)監(jiān)控?cái)z像頭的平面移動(dòng),極大的擴(kuò)大了監(jiān)控范圍;通過設(shè)置感應(yīng)器和感應(yīng)條,在出現(xiàn)監(jiān)控?cái)z像頭移動(dòng)到豎向或者橫向的最大行程仍無(wú)法監(jiān)控到目標(biāo)區(qū)域的情況時(shí),使得工作人員能夠?qū)υ撉闆r進(jìn)行了解,從而做出對(duì)應(yīng)處理;通過設(shè)置卡扣結(jié)構(gòu)實(shí)現(xiàn)基座與安裝面的連接,從而使得監(jiān)控單元可以進(jìn)行拆卸,方便維修管理,同時(shí)由子扣和母扣構(gòu)成的卡扣結(jié)構(gòu)操作起來(lái)方便快捷。
技術(shù)特征:
1.一種電力自動(dòng)化設(shè)備遠(yuǎn)程監(jiān)控裝置,其特征在于,包括:
2.根據(jù)權(quán)利要求1所述的電力自動(dòng)化設(shè)備遠(yuǎn)程監(jiān)控裝置,其特征在于,所述驅(qū)動(dòng)機(jī)構(gòu)包括移動(dòng)座(202)和安裝座(211),其中所述移動(dòng)座(202)滑動(dòng)設(shè)置在基座(201)的正面凹槽中且能夠沿著豎向來(lái)回移動(dòng),所述基座(201)的正面凹槽內(nèi)設(shè)置有與移動(dòng)座(202)螺紋連接的豎向絲桿(204),所述豎向絲桿(204)轉(zhuǎn)動(dòng)連接在基座(201)的正面凹槽中,所述豎向絲桿(204)由安裝于基座(201)上的豎向驅(qū)動(dòng)電機(jī)(205)驅(qū)動(dòng);所述監(jiān)控?cái)z像頭(203)安裝在所述安裝座(211)上,所述安裝座(211)滑動(dòng)設(shè)置在移動(dòng)座(202)的凹槽內(nèi)且能夠沿著橫向來(lái)回移動(dòng),所述移動(dòng)座(202)的凹槽內(nèi)設(shè)置有與安裝座(211)螺紋連接的橫向絲桿(206),所述橫向絲桿(206)轉(zhuǎn)動(dòng)連接在轉(zhuǎn)動(dòng)座(202)的凹槽中,所述橫向絲桿(206)由安裝于移動(dòng)座(202)上的橫向驅(qū)動(dòng)電機(jī)(207)驅(qū)動(dòng)。
3.根據(jù)權(quán)利要求2所述的電力自動(dòng)化設(shè)備遠(yuǎn)程監(jiān)控裝置,其特征在于,所述豎向絲桿(204)設(shè)置有兩個(gè)且相對(duì)于基座(201)的豎向?qū)ΨQ分布,所述豎向驅(qū)動(dòng)電機(jī)(205)的輸出端通過傳動(dòng)皮帶(212)與兩個(gè)所述豎向絲桿(204)傳動(dòng)連接。
4.根據(jù)權(quán)利要求3所述的電力自動(dòng)化設(shè)備遠(yuǎn)程監(jiān)控裝置,其特征在于,所述安裝座(211)上還固定有指示桿(208),所述基座(201)?的正面凹槽內(nèi)設(shè)置有與指示桿(208)相對(duì)應(yīng)的標(biāo)識(shí)(209)。
5.根據(jù)權(quán)利要求4所述的電力自動(dòng)化設(shè)備遠(yuǎn)程監(jiān)控裝置,其特征在于,所述指示桿(208)靠近基座(201)的一端還固定有主動(dòng)磁塊(213),所述基座(201)的背面設(shè)置有從動(dòng)磁塊(214),所述從動(dòng)磁塊(214)滑動(dòng)設(shè)置在基座(201)的背面凹槽中,所述主動(dòng)磁塊(213)和所述從動(dòng)磁塊(214)的相對(duì)面磁極相反,所述從動(dòng)磁塊(214)呈方形且豎向和橫向位置上均固定有感應(yīng)器(215),所述基座(201)的背面凹槽槽壁上固定有與感應(yīng)器(215)相適配的感應(yīng)條,所述感應(yīng)條包括豎向感應(yīng)條(216)和橫向感應(yīng)條(217),所述基座(201)上還安裝有警報(bào)器(210),所述警報(bào)器(210)與所述感應(yīng)器(215)以及所述感應(yīng)條電性連接,當(dāng)所述感應(yīng)器(215)移動(dòng)至與所述感應(yīng)條感應(yīng)的位置時(shí),所述警報(bào)器(210)向所述控制中心(10)發(fā)出報(bào)警信息。
6.根據(jù)權(quán)利要求2所述的電力自動(dòng)化設(shè)備遠(yuǎn)程監(jiān)控裝置,其特征在于,所述基座(201)與安裝面之間通過卡扣結(jié)構(gòu)連接,所述卡扣結(jié)構(gòu)包括固定于基座(201)背面的子扣(218)以及固定于安裝面的母扣(219)。
7.根據(jù)權(quán)利要求6所述的電力自動(dòng)化設(shè)備遠(yuǎn)程監(jiān)控裝置,其特征在于,所述母扣(219)呈橫條狀且設(shè)置有多個(gè),多個(gè)所述母扣(219)沿安裝面縱向分布。
8.根據(jù)權(quán)利要求6所述的電力自動(dòng)化設(shè)備遠(yuǎn)程監(jiān)控裝置,其特征在于,所述母扣(219)包括固定部(220)和轉(zhuǎn)動(dòng)連接于固定部(220)的轉(zhuǎn)動(dòng)部(221),所述固定部(220)和轉(zhuǎn)動(dòng)部(221)之間還連接有彈簧(223),所述轉(zhuǎn)動(dòng)部(221)的中間位置一體成型有用于支撐子扣(218)的支撐面(224);所述子扣(218)的尾部一體成型有凸起(222),所述凸起(222)的兩側(cè)為圓弧面,所述轉(zhuǎn)動(dòng)部(221)的頂部設(shè)置有與凸起(222)相對(duì)應(yīng)的導(dǎo)向面(225),所述導(dǎo)向面(225)為圓弧面。
技術(shù)總結(jié)
本發(fā)明公開了一種電力自動(dòng)化設(shè)備遠(yuǎn)程監(jiān)控裝置,該裝置包括控制中心;監(jiān)控模塊,由多個(gè)監(jiān)控單元構(gòu)成,用于向控制中心傳輸現(xiàn)場(chǎng)的實(shí)時(shí)監(jiān)控畫面,每個(gè)所述監(jiān)控單元包括基座、監(jiān)控?cái)z像頭以及驅(qū)動(dòng)機(jī)構(gòu);傳感器模塊,由多個(gè)用于檢測(cè)不同參數(shù)的傳感器構(gòu)成;當(dāng)至少一個(gè)所述傳感器檢測(cè)到的參數(shù)超過閾值時(shí),所述標(biāo)記該傳感器對(duì)應(yīng)的位置信息以獲取目標(biāo)區(qū)域,同時(shí)向所述驅(qū)動(dòng)機(jī)構(gòu)發(fā)出驅(qū)動(dòng)指令。本發(fā)明通過設(shè)置由控制中心、監(jiān)控模塊和傳感器模塊構(gòu)成的監(jiān)控裝置,能夠在現(xiàn)場(chǎng)發(fā)生異常情況時(shí)保證工作人員能夠?qū)崟r(shí)獲取有效的監(jiān)控畫面,從而保障了工作安全性,避免由于盲區(qū)的存在影響操作人員獲取異常信息的時(shí)效性。
技術(shù)研發(fā)人員:單曉晨,王磊,蔡淏,單元程
受保護(hù)的技術(shù)使用者:射陽(yáng)縣電氣實(shí)業(yè)有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!