貓砂盆的排泄物清理控制方法及裝置與流程
本發(fā)明涉及設(shè)備控制,尤其涉及一種貓砂盆的排泄物清理控制方法及裝置。
背景技術(shù):
1、隨著社會的發(fā)展和人們生活水平的不斷提高,人們在不斷提高物質(zhì)生活水平的同時,也開始注重和追求精神生活的富足,寵物作為人類獲取幸福感和精神滿足的來源之一,在滿足人們交往需要的同時,可以為人們帶來許多歡樂,因此,越來越多的人飼養(yǎng)寵物。然而,由于居住環(huán)境、氣味等因素的影響,寵物的排泄問題始終困擾著寵物飼養(yǎng)者。
2、目前,現(xiàn)有的寵物排泄物處理方式主要由飼養(yǎng)員手動鏟出,操作較為不便,以寵物貓的貓砂盆為例,飼養(yǎng)員需要時長對貓砂盆進行排泄物清理,以保證貓砂盆的健康清潔,但是清理效率低下。因此,提出一種能夠提高對貓砂盆中排泄物的清理效率的技術(shù)方案顯得尤為重要。
技術(shù)實現(xiàn)思路
1、本發(fā)明提供了一種貓砂盆的排泄物清理控制方法及裝置,能夠有利于提高對貓砂盆中排泄物的清理效率。
2、為了解決上述技術(shù)問題,本發(fā)明第一方面公開了一種貓砂盆的排泄物清理控制方法,所述方法應(yīng)用于貓砂盆中,所述貓砂盆包括驅(qū)動電機、篩鏟以及集糞倉,所述方法包括:
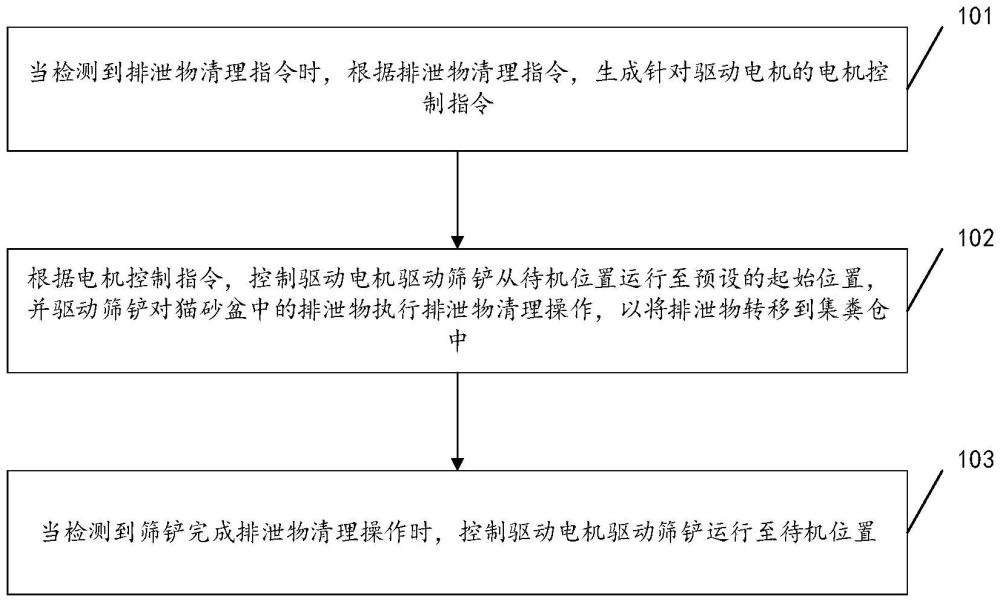
3、當(dāng)檢測到排泄物清理指令時,根據(jù)所述排泄物清理指令,生成針對所述驅(qū)動電機的電機控制指令;
4、根據(jù)所述電機控制指令,控制所述驅(qū)動電機驅(qū)動所述篩鏟從待機位置運行至預(yù)設(shè)的起始位置,并驅(qū)動所述篩鏟對所述貓砂盆中的排泄物執(zhí)行排泄物清理操作,以將所述排泄物轉(zhuǎn)移到所述集糞倉中;
5、當(dāng)檢測到所述篩鏟完成所述排泄物清理操作時,控制所述驅(qū)動電機驅(qū)動所述篩鏟運行至所述待機位置。
6、作為一種可選的實施方式,在本發(fā)明第一方面中,所述貓砂盆的前端包括用于寵物進出所述貓砂盆的第一開口,所述貓砂盆的后端包括用于將所述排泄物從所述貓砂盆轉(zhuǎn)移到所述集糞倉的第二開口,所述驅(qū)動電機包括升降運動電機和前后運動電機,所述電機控制指令包括針對所述升降運動電機的第一升降控制指令和第二升降控制指令,以及針對所述前后運動電機的第一前后控制指令;
7、所述根據(jù)所述電機控制指令,控制所述驅(qū)動電機驅(qū)動所述篩鏟從待機位置運行至預(yù)設(shè)的起始位置,包括:
8、根據(jù)所述第一升降控制指令,控制所述升降運動電機驅(qū)動所述篩鏟從待機位置向第一位置運行,并基于預(yù)設(shè)的判斷方式判斷所述篩鏟是否到達所述第一位置;
9、當(dāng)所述篩鏟到達所述第一位置時,根據(jù)所述第一前后控制指令,控制所述前后運動電機驅(qū)動所述篩鏟從所述第一位置向第二位置運行,并基于所述判斷方式判斷所述篩鏟是否到達所述第二位置;
10、當(dāng)所述篩鏟到達所述第二位置時,根據(jù)所述第二升降控制指令,控制所述升降運動電機驅(qū)動所述篩鏟從所述第二位置向第三位置運行,并基于所述判斷方式判斷所述篩鏟是否到達所述第三位置;
11、當(dāng)所述篩鏟到達所述第三位置時,確定所述篩鏟從所述待機位置運行至預(yù)設(shè)的起始位置;
12、其中,所述第一位置位于所述貓砂盆的后端的上部,所述第二位置位于所述貓砂盆的前端的上部,所述第三位置位于所述貓砂盆的前端的下部,預(yù)設(shè)的所述判斷方式包括限位開關(guān)判斷方式、編碼器距離計算判斷方式、激光測距判斷方式或者紅外對管判斷方式。
13、作為一種可選的實施方式,在本發(fā)明第一方面中,所述貓砂盆的后端還包括用于轉(zhuǎn)移所述排泄物的斜坡,所述電機控制指令還包括針對所述前后運動電機的第二前后控制指令和針對所述升降運動電機的第三升降控制指令;
14、所述驅(qū)動所述篩鏟對所述貓砂盆中的排泄物執(zhí)行排泄物清理操作,以將所述排泄物轉(zhuǎn)移到所述集糞倉中,包括:
15、根據(jù)所述第二前后控制指令,控制所述前后運動電機驅(qū)動所述篩鏟運行預(yù)設(shè)時長,將所述貓砂盆中的排泄物轉(zhuǎn)移至所述斜坡;
16、根據(jù)所述第三升降控制指令,控制所述升降運動電機驅(qū)動所述篩鏟從所述斜坡向所述第一位置運行,并基于預(yù)設(shè)的判斷方式判斷所述篩鏟是否到達所述第一位置;
17、當(dāng)所述篩鏟到達所述第一位置時,確定將所述排泄物轉(zhuǎn)移到所述集糞倉中。
18、作為一種可選的實施方式,在本發(fā)明第一方面中,所述當(dāng)檢測到所述篩鏟完成所述排泄物清理操作時,控制所述驅(qū)動電機驅(qū)動所述篩鏟運行至所述待機位置,包括:
19、當(dāng)檢測到所述篩鏟完成所述排泄物清理操作時,生成針對所述驅(qū)動電機的歸位控制指令,所述歸位控制指令包括針對所述前后運動電機的前后歸位指令以及針對所述升降運動電機的升降歸位指令;
20、根據(jù)所述前后歸位指令,控制所述前后運動電機驅(qū)動所述篩鏟從所述第一位置運動到第四位置,并基于所述判斷方式判斷所述篩鏟是否到達所述第四位置;
21、當(dāng)所述篩鏟到達所述第四位置時,根據(jù)所述升降歸位指令,控制所述升降運動電機驅(qū)動所述篩鏟從所述第四位置運動到第五位置,并基于所述判斷方式判斷所述篩鏟是否到達所述第五位置;
22、當(dāng)所述篩鏟到達所述第五位置時,確定所述篩鏟運行至所述待機位置;
23、所述第四位置位于所述第一位置的后部,所述第五位置位于所述第四位置的下部。
24、作為一種可選的實施方式,在本發(fā)明第一方面中,所述方法還包括:
25、確定所述貓砂盆的第一重量信息;
26、檢測目標(biāo)寵物是否進入所述貓砂盆,當(dāng)檢測到所述目標(biāo)寵物進入所述貓砂盆中時,確定所述目標(biāo)寵物在所述貓砂盆中的停留時長;
27、當(dāng)檢測到所述目標(biāo)寵物離開所述貓砂盆后,確定所述貓砂盆的第二重量信息,并根據(jù)所述第一重量信息和所述第二重量信息,確定所述貓砂盆的重量變化信息;
28、根據(jù)所述停留時長和所述重量變化信息,生成排泄物清理指令。
29、作為一種可選的實施方式,在本發(fā)明第一方面中,所述檢測目標(biāo)寵物是否進入所述貓砂盆,包括:
30、檢測所述貓砂盆的移動物體檢測范圍內(nèi)是否存在移動物體,當(dāng)所述移動物體檢測范圍內(nèi)存在所述移動物體時,對所述移動物體進行軌跡跟蹤,得到軌跡跟蹤結(jié)果;
31、根據(jù)所述軌跡跟蹤結(jié)果,判斷所述移動物體是否進入所述貓砂盆,當(dāng)所述移動物體進入所述貓砂盆時,對所述移動物體進行生物識別,判斷所述移動物體是否為目標(biāo)寵物;
32、以及,所述根據(jù)所述停留時長和所述重量變化信息,生成排泄物清理指令,包括:
33、判斷所述停留時長是否超過預(yù)設(shè)的停留時長閾值;
34、當(dāng)所述停留時長超過所述停留時長閾值時,判斷所述重量變化信息是否滿足預(yù)設(shè)的排泄物清理條件;
35、當(dāng)所述重量變化信息滿足所述排泄物清理條件時,生成排泄物清理指令。
36、作為一種可選的實施方式,在本發(fā)明第一方面中,所述方法還包括:
37、當(dāng)檢測到所述篩鏟完成所述排泄物清理操作時,記錄所述排泄物清理操作對應(yīng)的清理信息,所述清理信息包括清理重量、清理體積以及清理時刻;
38、根據(jù)所述清理重量和所述清理體積,確定所述集糞倉中的剩余容量;
39、根據(jù)所述清理時刻和所述剩余容量,預(yù)估所述集糞倉的容量到達預(yù)設(shè)的容量上限的目標(biāo)時刻,并根據(jù)所述目標(biāo)時刻生成集糞倉清理提示信息。
40、本發(fā)明第二方面公開了一種貓砂盆的排泄物清理控制裝置,所述裝置應(yīng)用于貓砂盆中,所述貓砂盆包括驅(qū)動電機、篩鏟以及集糞倉,所述裝置包括:
41、第一生成模塊,用于當(dāng)檢測到排泄物清理指令時,根據(jù)所述排泄物清理指令,生成針對所述驅(qū)動電機的電機控制指令;
42、控制模塊,用于根據(jù)所述電機控制指令,控制所述驅(qū)動電機驅(qū)動所述篩鏟從待機位置運行至預(yù)設(shè)的起始位置,并驅(qū)動所述篩鏟對所述貓砂盆中的排泄物執(zhí)行排泄物清理操作,以將所述排泄物轉(zhuǎn)移到所述集糞倉中;
43、所述控制模塊,還用于當(dāng)檢測到所述篩鏟完成所述排泄物清理操作時,控制所述驅(qū)動電機驅(qū)動所述篩鏟運行至所述待機位置。
44、作為一種可選的實施方式,在本發(fā)明第二方面中,所述貓砂盆的前端包括用于寵物進出所述貓砂盆的第一開口,所述貓砂盆的后端包括用于將所述排泄物從所述貓砂盆轉(zhuǎn)移到所述集糞倉的第二開口,所述驅(qū)動電機包括升降運動電機和前后運動電機,所述電機控制指令包括針對所述升降運動電機的第一升降控制指令和第二升降控制指令,以及針對所述前后運動電機的第一前后控制指令;
45、所述控制模塊根據(jù)所述電機控制指令,控制所述驅(qū)動電機驅(qū)動所述篩鏟從待機位置運行至預(yù)設(shè)的起始位置的方式具體包括:
46、根據(jù)所述第一升降控制指令,控制所述升降運動電機驅(qū)動所述篩鏟從待機位置向第一位置運行,并基于預(yù)設(shè)的判斷方式判斷所述篩鏟是否到達所述第一位置;
47、當(dāng)所述篩鏟到達所述第一位置時,根據(jù)所述第一前后控制指令,控制所述前后運動電機驅(qū)動所述篩鏟從所述第一位置向第二位置運行,并基于所述判斷方式判斷所述篩鏟是否到達所述第二位置;
48、當(dāng)所述篩鏟到達所述第二位置時,根據(jù)所述第二升降控制指令,控制所述升降運動電機驅(qū)動所述篩鏟從所述第二位置向第三位置運行,并基于所述判斷方式判斷所述篩鏟是否到達所述第三位置;
49、當(dāng)所述篩鏟到達所述第三位置時,確定所述篩鏟從所述待機位置運行至預(yù)設(shè)的起始位置;
50、其中,所述第一位置位于所述貓砂盆的后端的上部,所述第二位置位于所述貓砂盆的前端的上部,所述第三位置位于所述貓砂盆的前端的下部,預(yù)設(shè)的所述判斷方式包括限位開關(guān)判斷方式、編碼器距離計算判斷方式、激光測距判斷方式或者紅外對管判斷方式。
51、作為一種可選的實施方式,在本發(fā)明第二方面中,所述貓砂盆的后端還包括用于轉(zhuǎn)移所述排泄物的斜坡,所述電機控制指令還包括針對所述前后運動電機的第二前后控制指令和針對所述升降運動電機的第三升降控制指令;
52、所述控制模塊驅(qū)動所述篩鏟對所述貓砂盆中的排泄物執(zhí)行排泄物清理操作,以將所述排泄物轉(zhuǎn)移到所述集糞倉中的方式具體包括:
53、根據(jù)所述第二前后控制指令,控制所述前后運動電機驅(qū)動所述篩鏟運行預(yù)設(shè)時長,將所述貓砂盆中的排泄物轉(zhuǎn)移至所述斜坡;
54、根據(jù)所述第三升降控制指令,控制所述升降運動電機驅(qū)動所述篩鏟從所述斜坡向所述第一位置運行,并基于預(yù)設(shè)的判斷方式判斷所述篩鏟是否到達所述第一位置;
55、當(dāng)所述篩鏟到達所述第一位置時,確定將所述排泄物轉(zhuǎn)移到所述集糞倉中。
56、作為一種可選的實施方式,在本發(fā)明第二方面中,所述控制模塊當(dāng)檢測到所述篩鏟完成所述排泄物清理操作時,控制所述驅(qū)動電機驅(qū)動所述篩鏟運行至所述待機位置的方式具體包括:
57、當(dāng)檢測到所述篩鏟完成所述排泄物清理操作時,生成針對所述驅(qū)動電機的歸位控制指令,所述歸位控制指令包括針對所述前后運動電機的前后歸位指令以及針對所述升降運動電機的升降歸位指令;
58、根據(jù)所述前后歸位指令,控制所述前后運動電機驅(qū)動所述篩鏟從所述第一位置運動到第四位置,并基于所述判斷方式判斷所述篩鏟是否到達所述第四位置;
59、當(dāng)所述篩鏟到達所述第四位置時,根據(jù)所述升降歸位指令,控制所述升降運動電機驅(qū)動所述篩鏟從所述第四位置運動到第五位置,并基于所述判斷方式判斷所述篩鏟是否到達所述第五位置;
60、當(dāng)所述篩鏟到達所述第五位置時,確定所述篩鏟運行至所述待機位置;
61、所述第四位置位于所述第一位置的后部,所述第五位置位于所述第四位置的下部。
62、作為一種可選的實施方式,在本發(fā)明第二方面中,所述裝置還包括:
63、第一確定模塊,用于確定所述貓砂盆的第一重量信息;
64、檢測模塊,用于檢測目標(biāo)寵物是否進入所述貓砂盆,當(dāng)檢測到所述目標(biāo)寵物進入所述貓砂盆中時,確定所述目標(biāo)寵物在所述貓砂盆中的停留時長;
65、所述第一確定模塊,還用于當(dāng)檢測到所述目標(biāo)寵物離開所述貓砂盆后,確定所述貓砂盆的第二重量信息,并根據(jù)所述第一重量信息和所述第二重量信息,確定所述貓砂盆的重量變化信息;
66、第二生成模塊,用于根據(jù)所述停留時長和所述重量變化信息,生成排泄物清理指令。
67、作為一種可選的實施方式,在本發(fā)明第二方面中,所述檢測模塊檢測目標(biāo)寵物是否進入所述貓砂盆的方式具體包括:
68、檢測所述貓砂盆的移動物體檢測范圍內(nèi)是否存在移動物體,當(dāng)所述移動物體檢測范圍內(nèi)存在所述移動物體時,對所述移動物體進行軌跡跟蹤,得到軌跡跟蹤結(jié)果;
69、根據(jù)所述軌跡跟蹤結(jié)果,判斷所述移動物體是否進入所述貓砂盆,當(dāng)所述移動物體進入所述貓砂盆時,對所述移動物體進行生物識別,判斷所述移動物體是否為目標(biāo)寵物;
70、以及,所述第二生成模塊根據(jù)所述停留時長和所述重量變化信息,生成排泄物清理指令的方式具體包括:
71、判斷所述停留時長是否超過預(yù)設(shè)的停留時長閾值;
72、當(dāng)所述停留時長超過所述停留時長閾值時,判斷所述重量變化信息是否滿足預(yù)設(shè)的排泄物清理條件;
73、當(dāng)所述重量變化信息滿足所述排泄物清理條件時,生成排泄物清理指令。
74、作為一種可選的實施方式,在本發(fā)明第二方面中,所述裝置還包括:
75、記錄模塊,用于當(dāng)檢測到所述篩鏟完成所述排泄物清理操作時,記錄所述排泄物清理操作對應(yīng)的清理信息,所述清理信息包括清理重量、清理體積以及清理時刻;
76、第二確定模塊,用于根據(jù)所述清理重量和所述清理體積,確定所述集糞倉中的剩余容量;
77、預(yù)估模塊,用于根據(jù)所述清理時刻和所述剩余容量,預(yù)估所述集糞倉的容量到達預(yù)設(shè)的容量上限的目標(biāo)時刻,并根據(jù)所述目標(biāo)時刻生成集糞倉清理提示信息。
78、本發(fā)明第三方面公開了另一種貓砂盆的排泄物清理控制裝置,所述裝置包括:
79、存儲有可執(zhí)行程序代碼的存儲器;
80、與所述存儲器耦合的處理器;
81、所述處理器調(diào)用所述存儲器中存儲的所述可執(zhí)行程序代碼,執(zhí)行本發(fā)明第一方面公開的貓砂盆的排泄物清理控制方法。
82、本發(fā)明第四方面公開了一種計算機存儲介質(zhì),所述計算機存儲介質(zhì)存儲有計算機指令,所述計算機指令被調(diào)用時,用于執(zhí)行本發(fā)明第一方面公開的貓砂盆的排泄物清理控制方法。
83、與現(xiàn)有技術(shù)相比,本發(fā)明實施例具有以下有益效果:
84、本發(fā)明實施例中,當(dāng)檢測到排泄物清理指令時,根據(jù)排泄物清理指令,生成針對驅(qū)動電機的電機控制指令,根據(jù)電機控制指令,控制驅(qū)動電機驅(qū)動篩鏟從待機位置運行至預(yù)設(shè)的起始位置,并驅(qū)動篩鏟對貓砂盆中的排泄物執(zhí)行排泄物清理操作,以將排泄物轉(zhuǎn)移到集糞倉中,當(dāng)檢測到篩鏟完成排泄物清理操作時,控制驅(qū)動電機驅(qū)動篩鏟運行至待機位置。可見,實施本發(fā)明能夠通過驅(qū)動電機驅(qū)動貓砂盆內(nèi)收納的篩鏟對排泄物進行清理,提高對貓砂盆中排泄物的清理效率,根據(jù)排泄物清理指令自動化的對排泄物進行清理,提高對貓砂盆中排泄物的清理及時性以及自動化程度,進而提高用戶對貓砂盆的使用體驗。
- 還沒有人留言評論。精彩留言會獲得點贊!