一種基于雙邊單目實(shí)時(shí)檢測(cè)的釀酒葡萄株間除草裝置及其使用方法
本發(fā)明涉及葡萄株間除草裝置,具體涉及一種基于雙邊單目實(shí)時(shí)檢測(cè)的釀酒葡萄株間除草裝置及其使用方法。
背景技術(shù):
1、銀川賀蘭山東麓的釀酒葡萄園種植模式不規(guī)范,地形復(fù)雜,刀具離地面過(guò)高會(huì)減少除草率,過(guò)低會(huì)影響底盤(pán)行駛和造成刀具的損壞,現(xiàn)有釀酒葡萄株間除草裝置的仿地形效果均難以達(dá)到預(yù)期效果。
2、一般情況下,葡萄藤的定位方法有地標(biāo)法、行距和株距測(cè)量法、gis、gps、視覺(jué)定位技術(shù)、激光掃描技術(shù)、uav技術(shù)。但是地標(biāo)法所需時(shí)間長(zhǎng)、勞動(dòng)力成本高,行距和株距測(cè)量法誤差太大,早以不能滿足需求;gis和gps依然需要提前標(biāo)定工作;視覺(jué)定位技術(shù)和激光掃描技術(shù)容易受環(huán)境影響,且激光掃描技術(shù)更適合在室內(nèi)使用;uav技術(shù)成本太高。綜上,視覺(jué)定位技術(shù)是運(yùn)用比較廣泛和效果較好的葡萄藤定位方法。
3、但是,目前視覺(jué)定位技術(shù)用來(lái)進(jìn)行葡萄藤定位也存在一定問(wèn)題:一是攝像頭受光照影響會(huì)產(chǎn)生過(guò)曝光或欠曝光的情況,會(huì)給圖像造成高光細(xì)節(jié)丟失、顏色失真、對(duì)比度降低、動(dòng)態(tài)范圍縮小或暗部細(xì)節(jié)丟失、噪點(diǎn)增加等不良影響,從而造成無(wú)法識(shí)別或定位葡萄藤。例如,在牽引裝置上裝加了除草設(shè)備,只使用單邊單一刀具進(jìn)行除草。二是視覺(jué)定位技術(shù)現(xiàn)普遍使用深度學(xué)習(xí)的方式進(jìn)行識(shí)別葡萄藤。因?qū)幭馁R蘭山東麓的葡萄藤與土壤顏色幾乎沒(méi)有差別、葡萄地環(huán)境復(fù)雜等因素,會(huì)造成深度學(xué)習(xí)的模型參數(shù)量增大,需要適配更強(qiáng)的算力系統(tǒng)和更多的計(jì)算時(shí)間,實(shí)時(shí)性比較欠缺,且復(fù)雜的田間環(huán)境也讓識(shí)別正確率不能滿足除草底盤(pán)的檢測(cè)要求,從而造成除草機(jī)具對(duì)葡萄藤不避讓、避讓不及時(shí)或錯(cuò)誤避讓。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明提供了一種基于雙邊單目實(shí)時(shí)檢測(cè)的釀酒葡萄株間除草裝置,所述裝置包括:上遮光板,底盤(pán),仿地形推,棋盤(pán)格標(biāo)定靶,攝像頭,背景板,刀具機(jī)構(gòu)和萬(wàn)向行程開(kāi)關(guān);
2、所述上遮光板與底盤(pán)相連;
3、仿地形推桿安裝在底盤(pán)內(nèi)壁上與刀具機(jī)構(gòu)相連,所述刀具機(jī)構(gòu)底部安裝所述萬(wàn)向行程開(kāi)關(guān);
4、所述背景板上布設(shè)有攝像頭和棋盤(pán)格標(biāo)定靶。
5、可選的,所述仿地形推桿安裝在底盤(pán)內(nèi)側(cè),與刀具機(jī)構(gòu)連接,仿地形推桿上下移動(dòng)帶動(dòng)整個(gè)刀具機(jī)構(gòu)上下移動(dòng)。
6、可選的,所述背景板使用紅色不透明亞克力板。
7、本發(fā)明還公開(kāi)一種基于雙邊單目實(shí)時(shí)檢測(cè)的釀酒葡萄株間除草裝置的控制方法,所述方法包括:
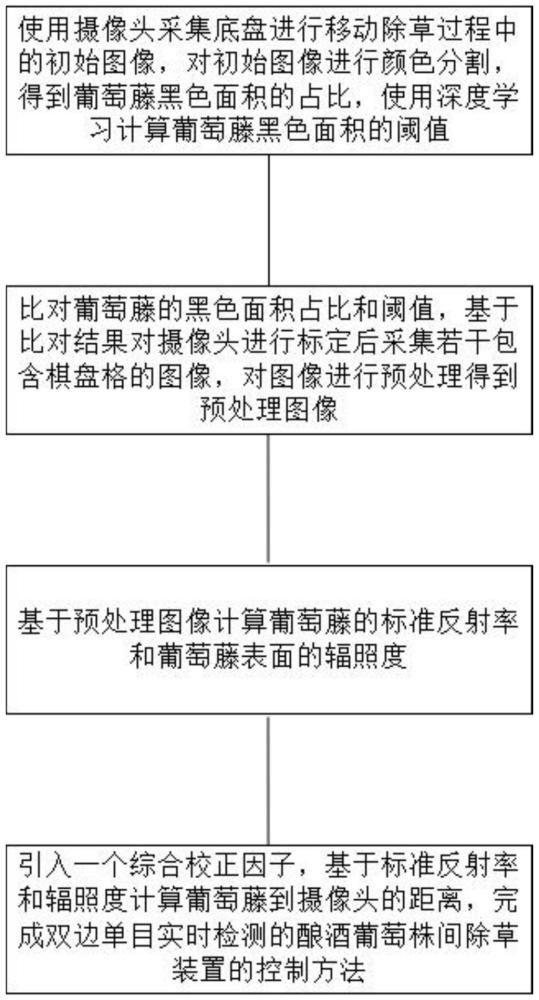
8、使用攝像頭采集底盤(pán)進(jìn)行移動(dòng)除草過(guò)程中的初始圖像,對(duì)初始圖像進(jìn)行顏色分割,得到葡萄藤黑色面積的占比,使用深度學(xué)習(xí)計(jì)算葡萄藤黑色面積的閾值;
9、比對(duì)葡萄藤的黑色面積占比和閾值,基于比對(duì)結(jié)果對(duì)攝像頭進(jìn)行標(biāo)定后采集若干包含棋盤(pán)格的圖像,對(duì)圖像進(jìn)行預(yù)處理得到預(yù)處理圖像;
10、基于預(yù)處理圖像計(jì)算葡萄藤的標(biāo)準(zhǔn)反射率和葡萄藤表面的輻照度;
11、引入一個(gè)綜合校正因子,基于標(biāo)準(zhǔn)反射率和輻照度計(jì)算葡萄藤到攝像頭的距離,完成雙邊單目實(shí)時(shí)檢測(cè)的釀酒葡萄株間除草裝置的控制方法。
12、可選的,對(duì)所述初始圖像進(jìn)行顏色分割的過(guò)程具體包括:
13、將所述初始圖像中的紅色與綠色轉(zhuǎn)換為黑色,其它顏色轉(zhuǎn)換為白色,將顏色轉(zhuǎn)換后的初始圖像進(jìn)行裁剪,使得圖像邊框與背景邊框重合。
14、可選的,所述深度學(xué)習(xí)為包含三個(gè)隱藏層的前饋神經(jīng)網(wǎng)絡(luò),第一層有128個(gè)神經(jīng)元,第二層有64個(gè)神經(jīng)元,第三層有32個(gè)神經(jīng)元,每層隱藏層后添加batch?normalization,輸出層使用sigmoid激活函數(shù)進(jìn)行標(biāo)準(zhǔn)化。
15、可選的,引入一個(gè)綜合校正因子,基于所述標(biāo)準(zhǔn)反射率和輻照度計(jì)算葡萄藤到攝像頭的距離的方法具體包括:
16、
17、其中,dref為標(biāo)定靶平面到攝像頭的距離,rref為標(biāo)定靶平面的標(biāo)準(zhǔn)反射率,r為葡萄藤的標(biāo)準(zhǔn)反射率,ρ(θ)為校正因子,θref為標(biāo)定靶平面相對(duì)于攝像機(jī)視線的入射角度,iref為標(biāo)定靶平面像素強(qiáng)度值,i為葡萄藤在圖像中對(duì)應(yīng)像素強(qiáng)度值,κ為綜合校正因子。
18、可選的,所述標(biāo)定靶平面像素強(qiáng)度值的計(jì)算公式為:
19、iref=g·eref·t
20、其中,g為攝像頭增益,t為曝光時(shí)間,eref為標(biāo)定靶平面在相機(jī)傳感器平面上所產(chǎn)生的輻照度。
21、與現(xiàn)有技術(shù)相比,本發(fā)明的有益效果為:
22、本發(fā)明通過(guò)采用雙邊單目攝像頭設(shè)計(jì),解決了單目視覺(jué)技術(shù)在強(qiáng)光條件下導(dǎo)致的高光細(xì)節(jié)丟失、顏色失真等問(wèn)題,確保了葡萄藤的高精度檢測(cè)和定位;結(jié)合了顏色分割、深度學(xué)習(xí)前饋神經(jīng)網(wǎng)絡(luò)、實(shí)時(shí)檢測(cè)與校正,在田間復(fù)雜環(huán)境下,實(shí)時(shí)性和識(shí)別精度得到顯著提升,降低了對(duì)高算力設(shè)備的需求,保證了除草作業(yè)的連續(xù)性和穩(wěn)定性;通過(guò)仿地形推桿與刀具機(jī)構(gòu)的聯(lián)動(dòng)設(shè)計(jì),裝置能夠根據(jù)地形起伏實(shí)現(xiàn)刀具的上下自適應(yīng)調(diào)節(jié),能適應(yīng)復(fù)雜地形,提高了除草精度和刀具壽命,確保裝置在多種田間環(huán)境下高效作業(yè)。通過(guò)引入綜合校正因子,對(duì)標(biāo)準(zhǔn)反射率和葡萄藤表面輻照度進(jìn)行動(dòng)態(tài)校正,計(jì)算葡萄藤到攝像頭的精確距離,克服了視覺(jué)定位中光照條件不穩(wěn)定帶來(lái)的距離測(cè)量誤差,提高了葡萄藤檢測(cè)與定位的精度;通過(guò)顏色分割和裁剪預(yù)處理,將葡萄藤與背景有效區(qū)分,簡(jiǎn)化了后續(xù)深度學(xué)習(xí)的輸入數(shù)據(jù),提高了圖像處理的效率和實(shí)時(shí)性。同時(shí),使用紅色不透明亞克力背景板增強(qiáng)圖像對(duì)比度,進(jìn)一步降低了視覺(jué)誤差。
技術(shù)特征:
1.一種基于雙邊單目實(shí)時(shí)檢測(cè)的釀酒葡萄株間除草裝置,其特征在于,所述裝置包括:上遮光板,底盤(pán),仿地形推,棋盤(pán)格標(biāo)定靶,攝像頭,背景板,刀具機(jī)構(gòu)和萬(wàn)向行程開(kāi)關(guān);
2.根據(jù)權(quán)利要求1所述的基于雙邊單目實(shí)時(shí)檢測(cè)的釀酒葡萄株間除草裝置,其特征在于,所述仿地形推桿安裝在底盤(pán)內(nèi)側(cè),與刀具機(jī)構(gòu)連接,仿地形推桿上下移動(dòng)帶動(dòng)整個(gè)刀具機(jī)構(gòu)上下移動(dòng)。
3.根據(jù)權(quán)利要求1所述的基于雙邊單目實(shí)時(shí)檢測(cè)的釀酒葡萄株間除草裝置,其特征在于,所述背景板使用紅色不透明亞克力板。
4.一種基于雙邊單目實(shí)時(shí)檢測(cè)的釀酒葡萄株間除草裝置的控制方法,所述控制方法用于控制權(quán)利要求1-3任一項(xiàng)所述的釀酒葡萄株間除草裝置,其特征在于,所述方法包括:
5.根據(jù)權(quán)利要求4所述的基于雙邊單目實(shí)時(shí)檢測(cè)的釀酒葡萄株間除草裝置的控制方法,其特征在于,對(duì)所述初始圖像進(jìn)行顏色分割的過(guò)程具體包括:
6.根據(jù)權(quán)利要求5所述的基于雙邊單目實(shí)時(shí)檢測(cè)的釀酒葡萄株間除草裝置的控制方法,其特征在于,所述深度學(xué)習(xí)為包含三個(gè)隱藏層的前饋神經(jīng)網(wǎng)絡(luò),第一層有128個(gè)神經(jīng)元,第二層有64個(gè)神經(jīng)元,第三層有32個(gè)神經(jīng)元,每層隱藏層后添加batch?normalization,輸出層使用sigmoid激活函數(shù)進(jìn)行標(biāo)準(zhǔn)化。
7.根據(jù)權(quán)利要求4所述的基于雙邊單目實(shí)時(shí)檢測(cè)的釀酒葡萄株間除草裝置的控制方法,其特征在于,引入一個(gè)綜合校正因子,基于所述標(biāo)準(zhǔn)反射率和輻照度計(jì)算葡萄藤到攝像頭的距離的方法具體包括:
8.根據(jù)權(quán)利要求7所述的基于雙邊單目實(shí)時(shí)檢測(cè)的釀酒葡萄株間除草裝置的控制方法,其特征在于,所述標(biāo)定靶平面像素強(qiáng)度值的計(jì)算公式為:
技術(shù)總結(jié)
本發(fā)明公開(kāi)了一種基于雙邊單目實(shí)時(shí)檢測(cè)的釀酒葡萄株間除草裝置及其使用方法,方法包括:使用攝像頭采集底盤(pán)進(jìn)行移動(dòng)除草過(guò)程中的初始圖像,對(duì)初始圖像進(jìn)行顏色分割,得到葡萄藤黑色面積的占比,使用深度學(xué)習(xí)計(jì)算葡萄藤黑色面積的閾值;比對(duì)葡萄藤的黑色面積占比和閾值,基于比對(duì)結(jié)果對(duì)攝像頭進(jìn)行標(biāo)定后采集若干包含棋盤(pán)格的圖像,對(duì)圖像進(jìn)行預(yù)處理得到預(yù)處理圖像;基于預(yù)處理圖像計(jì)算葡萄藤的標(biāo)準(zhǔn)反射率和葡萄藤表面的輻照度;引入一個(gè)綜合校正因子,基于標(biāo)準(zhǔn)反射率和輻照度計(jì)算葡萄藤到攝像頭的距離,完成雙邊單目實(shí)時(shí)檢測(cè)的釀酒葡萄株間除草裝置的控制方法。本發(fā)明使用兩個(gè)攝像頭同時(shí)進(jìn)行檢測(cè),避免單側(cè)的陽(yáng)光照射影響。
技術(shù)研發(fā)人員:馬伏龍,張沖,高德華,楊術(shù)明,李進(jìn)海,李茂強(qiáng),陳云,高垚垚,王昱潭,曲愛(ài)麗
受保護(hù)的技術(shù)使用者:寧夏大學(xué)
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!