一種應用于果園噴藥的機器人持續大面積噴藥系統
本發明涉及果園噴藥領域,具體涉及一種應用于果園噴藥的機器人持續大面積噴藥系統。
背景技術:
1、隨著智能化農業的發展,越來越多的農業種植過程中利用機器人代替人工勞動,這有助于提高勞動效率,降低農業戶的人工成本。特別是在農業噴藥領域,現有技術中有多種多樣的噴藥機器人。
2、現有技術中,大多數的噴藥機器人均是背負式,在機器人上安裝農藥存儲箱,在配藥開始前,將農藥存儲箱裝滿,再攜帶進入果園內進行打藥。但是這種設計可持續性差,農藥消耗完之后需要回到起點添加農藥,這就會增加能耗和降低噴藥效率;并且機器人攜帶農藥的負重量大也會增加能耗,降低噴藥機器人的單次噴藥面積。
技術實現思路
1、針對現有技術的上述不足,本發明提供了一種應用于果園噴藥的機器人持續大面積噴藥系統。
2、為達到上述發明目的,本發明所采用的技術方案為:
3、提供一種應用于果園噴藥的機器人持續大面積噴藥系統,其包括噴藥機器人、布設在果園田壟上的管道系統以及為管道系統提供農藥的農藥供應系統;
4、噴藥機器人包括機器人本體,機器人本體內設置有管道收納系統,管道收納系統內的管道通過機器人本體尾部設置的管道口伸出、且與管道系統連接,當機器人在果園內行走噴藥時,機器人牽拉管道、管道收納系統釋放管道從管道口伸出或回收,噴藥機器人上設置有升降噴藥系統,升降噴藥系統與管道收納系統內的管道連接;
5、農藥供應系統包括農藥儲罐,農藥儲罐通過輸送管道依次與增壓泵、輸送泵和分水器連接,分水器的分水接頭上分別與管道系統的分支管道連接,分支管道的端部設置有與噴藥機器人上管道連接的管道接頭,且分支管道上設置有閥門。
6、進一步地,管道收納系統包括設置在機器人本體內的第一管道卷繞機,第一管道卷繞機的轉軸上設置有驅動齒輪,管道卷繞機安裝在機架上,管道卷繞機的上方設置有排管機構;
7、排管機構包括活動塊,活動塊內設置有供管道穿過的管道孔,活動塊的兩側設置有第一連接塊和第二連接塊,第一連接塊內設置有螺紋孔與螺紋桿連接,螺紋桿旁平行設置有光桿,第二連接塊內設置有滑孔與光桿滑動連接,螺紋桿、光桿與第一管道卷繞機之間軸向平行;
8、螺紋桿上設置有從動齒輪,從動齒輪與驅動齒輪之間通過中間齒輪連接,且從動齒輪與中間齒輪、驅動齒輪與中間齒輪嚙合。
9、進一步地,活動塊與第一連接塊、活動塊與第二連接塊之間均通過活動伸縮桿連接,活動塊在第一連接塊、第二連接塊之間可進行活動,且活動塊與第一連接塊、活動塊與第二連接塊之間均設置有對活動塊的活動進行限位的限位彈簧。
10、進一步地,管道孔的上端設置有橡膠套,橡膠套的上端設置有支撐環,管道穿過橡膠套和支撐環,橡膠套外套設有擺動支撐彈簧,支撐座的上方設置有將管道從管道口引導進入橡膠套的引導機構。
11、進一步地,引導機構包括安裝在支撐環上方的引導架,引導架包括兩塊弧形的引導板,兩塊引導板之間轉動設置有若干引導支撐輪,若干引導支撐輪在引導板上成倒彎鉤分排列,使兩塊引導板之間形成倒彎鉤狀的管道引導通道,引導支撐輪的中部設置有下凹的、弧形的引導槽,引導架與管道口之前設置有牽引機構;
12、牽引機構包括兩個牽引輪,兩個牽引輪上也設置有下凹的、弧形的引導槽,管道穿過兩個牽引輪之間的間隙,兩個牽引輪豎向轉動設置在安裝架上,安裝架固定在機器人本體的側壁上,兩個牽引輪的轉軸上均設置有轉速傳感器,管道在機器人的牽拉移動過程中,驅動兩個牽引輪進行轉動;
13、管道通過牽引機構的牽引過度從管道口進入引導機構,通過引導機構的引導進入管道孔內,并纏繞在第一管道卷繞機上。
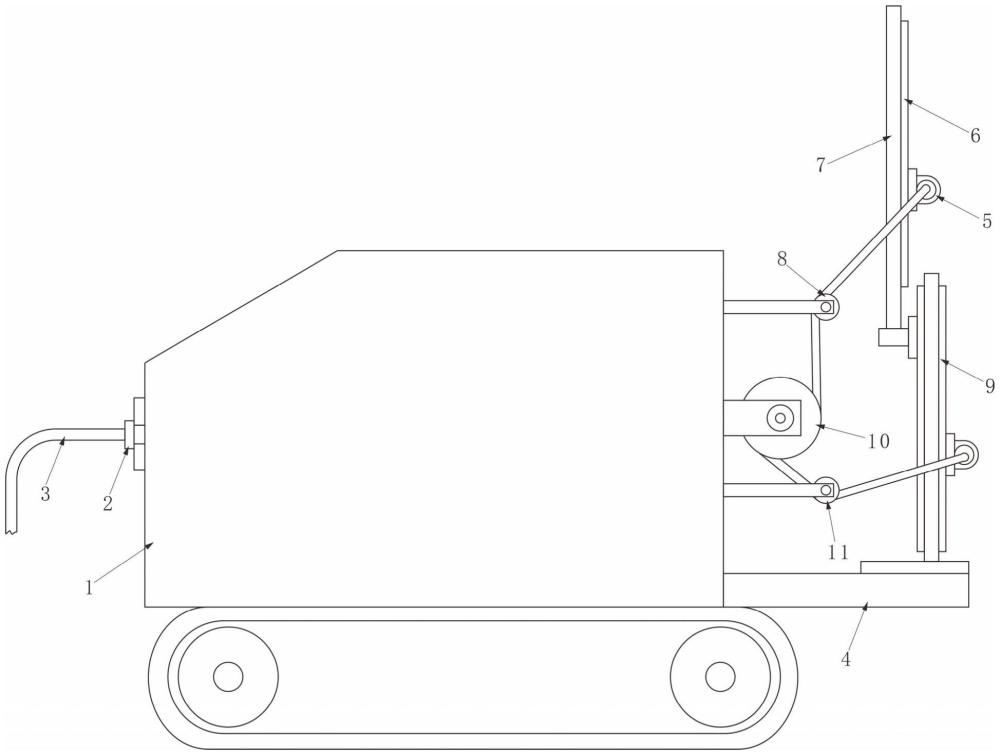
14、進一步地,升降噴藥系統包括設置在噴藥機器人頭部的噴藥支撐座,噴藥支撐座的上端設置有第一級支撐架,第一級支撐架的上端設置有第二級支撐架,第一級支撐架上豎向設置有第一直線移動模組,第二級支撐架上豎向設置有第二直線移動模組,第一直線移動模組、第二直線移動模組的滑塊上分別通過管道卡扣固定有第一級噴藥管道和第二級噴藥管道,第一級噴藥管道和第二級噴藥管道上安裝有若干噴藥噴頭;
15、噴藥機器人的頭部配備有第一級管道卷繞機和第二級管道卷繞機,第一級管道卷繞機、第二級管道卷繞機和第一管道卷繞機結構相同,第一管道卷繞機上的管道通過噴藥機器人頭部設置的分水組件牽出,分水組件上分別連接第一級分水管和第二級分水管,第一級分水管和第二級分水管分別連接纏繞在第一級管道卷繞機、第二級管道卷繞機上的第一級卷繞管和第二級卷繞管,第一級卷繞管和第二級卷繞管分別通過第一級牽引輪、第二級牽引輪與第一級噴藥管道和第二級噴藥管道連接。
16、進一步地,噴藥機器人在移動的過程中控制第一管道卷繞機的工作過程包括:
17、實時采集當前噴藥機器人在果園行走的速度v,根據速度v計算第一管道卷繞機的電機轉速n;其中,r為第一管道卷繞機的卷繞半徑;
18、管道被牽引移動的過程中,轉速傳感器實時采集兩個牽引輪的轉速n1、n2;比較轉速n1、n2之間的大小,獲取轉速n1、n2之間的最大值nmax,計算最大值nmax對應的管道牽引移動速度v;r′為牽引輪的最小半徑;
19、計算管道牽引速度v與速度v之間的差值δv=|v-v|,并與設置的牽引速度誤差閾值δv閾值進行比較;
20、若δv≤δv閾值,則第一管道卷繞機的保持電機轉速n進行工作;
21、若δv>δv閾值,則第一管道卷繞機的保持電機轉速n進行工作,則修正第一管道卷繞機的電機轉速,將電機轉速調整為n′;
22、本發明的有益效果為:本方案用于在果園種植園區內進行噴藥,通過機器人牽拉輸送農藥的管道到達果園的田壟內,并通過攜帶的噴藥噴頭進行配藥操作,噴藥機器人無需背負沉重的農藥在園區內行走,大大提升了噴藥機器人的續航能力。并且通過噴藥機器人內部設計的管道卷繞機對管道進行收納,并配合噴藥機器人在不同位置對管道進行收放,避免管道出現纏繞、打結等,管道的伸出或收緊的長度能適應噴藥機器人的行走速度。同時,噴藥過程中噴頭的高度可以調整,以適應不同高度的果樹進行噴藥。
技術特征:
1.一種應用于果園噴藥的機器人持續大面積噴藥系統,其特征在于,包括噴藥機器人、布設在果園田壟上的管道系統以及為管道系統提供農藥的農藥供應系統;
2.根據權利要求1所述的應用于果園噴藥的機器人持續大面積噴藥系統,其特征在于,所述管道收納系統包括設置在機器人本體內的第一管道卷繞機,所述第一管道卷繞機的轉軸上設置有驅動齒輪,所述管道卷繞機安裝在機架上,所述管道卷繞機的上方設置有排管機構;
3.根據權利要求2所述的應用于果園噴藥的機器人持續大面積噴藥系統,其特征在于,所述活動塊與第一連接塊、活動塊與第二連接塊之間均通過活動伸縮桿連接,所述活動塊在第一連接塊、第二連接塊之間可進行活動,且活動塊與第一連接塊、活動塊與第二連接塊之間均設置有對活動塊的活動進行限位的限位彈簧。
4.根據權利要求2所述的應用于果園噴藥的機器人持續大面積噴藥系統,其特征在于,所述管道孔的上端設置有橡膠套,所述橡膠套的上端設置有支撐環,所述管道穿過橡膠套和支撐環,所述橡膠套外套設有擺動支撐彈簧,所述支撐座的上方設置有將管道從管道口引導進入橡膠套的引導機構。
5.根據權利要求4所述的應用于果園噴藥的機器人持續大面積噴藥系統,其特征在于,所述引導機構包括安裝在支撐環上方的引導架,所述引導架包括兩塊弧形的引導板,兩塊所述引導板之間轉動設置有若干引導支撐輪,若干所述引導支撐輪在引導板上成倒彎鉤分排列,使兩塊所述引導板之間形成倒彎鉤狀的管道引導通道,所述引導支撐輪的中部設置有下凹的、弧形的引導槽,所述引導架與管道口之前設置有牽引機構;
6.根據權利要求5所述的應用于果園噴藥的機器人持續大面積噴藥系統,其特征在于,所述升降噴藥系統包括設置在噴藥機器人頭部的噴藥支撐座,所述噴藥支撐座的上端設置有第一級支撐架,所述第一級支撐架的上端設置有第二級支撐架,所述第一級支撐架上豎向設置有第一直線移動模組,所述第二級支撐架上豎向設置有第二直線移動模組,所述第一直線移動模組、第二直線移動模組的滑塊上分別通過管道卡扣固定有第一級噴藥管道和第二級噴藥管道,所述第一級噴藥管道和第二級噴藥管道上安裝有若干噴藥噴頭;
7.根據權利要求6所述的應用于果園噴藥的機器人持續大面積噴藥系統,其特征在于,所述噴藥機器人在移動的過程中控制第一管道卷繞機的工作過程包括:
技術總結
本發明公開了一種應用于果園噴藥的機器人持續大面積噴藥系統,包括噴藥機器人、布設在果園田壟上的管道系統以及為管道系統提供農藥的農藥供應系統;噴藥機器人包括機器人本體,機器人本體內設置有管道收納系統,當機器人在果園內行走噴藥時,機器人牽拉管道、管道收納系統釋放管道從管道口伸出或回收,噴藥機器人上設置有升降噴藥系統,升降噴藥系統與管道收納系統內的管道連接;本方案用于在果園種植園區內進行噴藥,通過機器人牽拉輸送農藥的管道到達果園的田壟內,并通過攜帶的噴藥噴頭進行配藥操作,噴藥機器人無需背負沉重的農藥在園區內行走,大大提升了噴藥機器人的續航能力。
技術研發人員:付行政
受保護的技術使用者:西南大學
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!