基于射頻線圈的核磁影像引導手術定位裝置及定位方法
本發明主要涉及醫療輔助設備,具體涉及一種基于射頻線圈的核磁影像引導手術定位裝置及定位方法。
背景技術:
1、外科介入手術是治療這些疾病的最主要手段。近幾年,隨著醫學成像設備及成像技術的成熟,影像引導的機器人輔助手術,因其高效、微創和無輻射的特性已被廣泛用于改善介入手術的臨床效果。在各種醫學成像方式中,核磁共振成像提供更高質量的軟組織對比,并且不會使患者暴露于電離輻射,使其成為越來越有吸引力的選擇,用于指導機器人輔助各種應用,如神經外科穿刺、心血管手術和前列腺活檢。核磁影像引導的機器人輔助介入式外科手術,依靠核磁成像設備在手術過程中對機器人的動作進行引導,以實現術中手術器械的精準的定位與導航,確保其能夠安全且準確的到達患者的病灶靶點處,在保證手術創傷最小化的同時,順利完成手術。
2、在手術器械導航過程中,首先需要確定手術器械空間坐標系與影像空間坐標系的轉換關系,并實時獲取手術器械在核磁影像空間中的位置坐標,從而對介入過程進行精準控制。然而計算坐標系之間的轉換關系,需要選擇合適的共有參考點,并同時確定其在兩個坐標系下的空間位置。但現有的介入手術器械大多為金屬材質,會在核磁影像中引入金屬偽影,從而導致手術器械區域的影像失真,造成了檢測與定位的困難。目前常用的解決方法是將手術器械與定位框架剛性連接,以框架坐標系為參考,通過對框架坐標系與核磁影像坐標系配準,間接實現手術器械空間坐標系與影像空間坐標系的配準,并在術中借助框架上的標記點完成對手術器械的定位。
3、現有的brown-roberts-wells定位框架僅能提供三個有效參考標記點,通過求解三個標記點分別在影像坐標系和框架坐標系中的三維坐標值,來求解兩坐標系之間的空間轉換關系。只要有一個點的坐標值計算不準確,就會導致兩坐標系間的空間轉換矩陣的求解誤差極大。此外,由于現有定位框架上的標記清晰度較差且與背景區域的亮度對比度較低,因此難以被穩定檢測,從而容易導致術中對手術器械的定位不準確。因此,亟需設計一種新型定位框架,用于解決傳統brown-roberts-wells定位框架中三維標記點不足且清晰度不高所導致的實際應用誤差大、魯棒性低的問題,實現手術器械空間坐標系與核磁影像空間坐標系的精確配準,以及手術器械的術中精準定位。
技術實現思路
1、針對現有技術存在的技術問題,本發明提供一種定位精準的基于射頻線圈的核磁影像引導手術定位裝置及定位方法。
2、為解決上述技術問題,本發明提出的技術方案為:
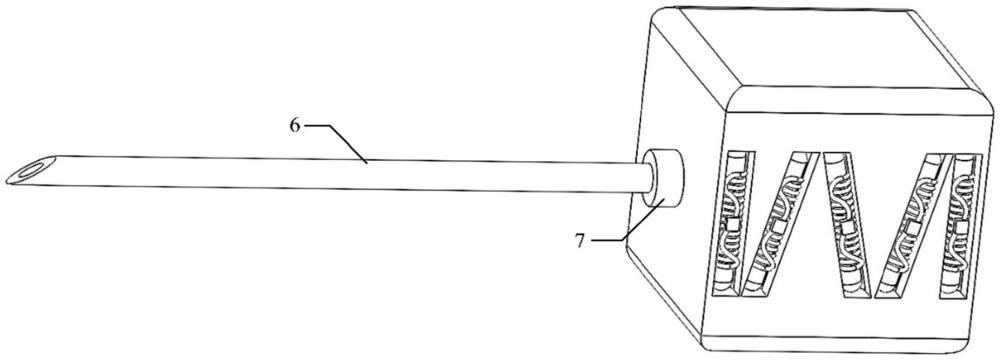
3、一種基于射頻線圈的核磁影像引導手術定位裝置,包括實心塊,所述實心塊的至少三個面設置有多個凹槽;各所述凹槽內均安裝有填充造影劑的玻璃管,所述玻璃管上纏繞有射頻線圈。
4、作為上述技術方案的進一步改進:
5、所述射頻線圈包括多圈環形纏繞的絕緣銅線組成的電感和一個陶瓷片式電容器,所述電感與所述電容器并聯。
6、所述造影劑為濃度5%的硫酸銅溶液。
7、所述實心塊為丙烯酸塑料制成的立方體,所述凹槽位于所述立方體的三個相鄰面上,且其中兩個面相對設置。
8、本發明還公開了一種基于如上所述的基于射頻線圈的核磁影像引導手術定位裝置的定位方法,包括步驟:
9、s1、獲取定位裝置的二維核磁切片影像;所述二維核磁切片影像中包括所有玻璃管的造影劑在核磁影像下產生的標記;
10、s2、求解標記質心點的影像坐標,并根據坐標對所有標記質心點進行分組排序,將在實心塊同一平面的質心點分成同一組,得到多組質心點集;
11、s3、根據實心塊的實際三維尺寸信息建立定位裝置坐標系,然后根據每組質心點集中所有質心點在影像坐標系中的位置以及實心塊內玻璃管的位置分布幾何關系,求解其中預設質心點在定位裝置坐標系下的三維空間坐標;
12、s4、根據預設質心點在定位裝置坐標系和影像坐標系中的坐標,得到定位裝置坐標系相對于影像坐標系的平移矩陣r;
13、s5、根據預設質心點在定位裝置坐標系和影像坐標系中的坐標以及平移矩陣r,得到定位裝置坐標系相對于影像坐標系的平移矩陣t;
14、s6、根據旋轉矩陣r和平移矩陣t得到定位裝置坐標系相對于影像坐標系的空間轉換矩陣t,再根據手術器械坐標系和定位裝置坐標系之間的轉換關系,進而得到手術器械空間坐標系與影像空間坐標系的空間轉換矩陣;
15、s7、選擇其中一個玻璃管的標記作為參考標記點,確定參考標記點與手術器械尖端點在手術器械空間坐標系中的相對位置,再基于步驟s6中的手術器械空間坐標系與影像空間坐標系的空間轉換矩陣,計算得到手術器械尖端點在核磁影像空間坐標系下的真實位置,實現核磁影像下的手術器械定位。
16、作為上述技術方案的進一步改進:
17、在步驟s4中,根據預設質心點在定位裝置坐標系和影像坐標系中的坐標,得到兩坐標系的旋轉軸向量u,以及兩坐標系繞旋轉軸向量u的旋轉角度,進而得到定位裝置坐標系相對于影像坐標系的平移矩陣r。
18、所述平移矩陣r的計算公式為:
19、
20、其中旋轉軸向量u=(ux,uy,uz)。
21、得到兩坐標系的旋轉軸向量u的具體過程為:
22、根據預設質心點在兩個坐標系中的坐標,分別通過最小二乘法進行擬合,分別得到預設質心點所在平面在兩個坐標系中的平面方程,根據兩個平面方程計算得到平面在定位裝置坐標系中的單位法向量n和平面在影像坐標系中的單位法向量n1;再通過計算單位法向量n和n1的叉乘,得到兩坐標系的旋轉軸向量u。
23、旋轉角度θ的計算公式為:θ=arccos(n·n1)。
24、步驟s5的具體過程為:
25、對預設質心點在影像坐標系下的坐標取平均得到點pi;對預設質心點在定位裝置坐標系下的坐標取平均得到點pc,再基于平移矩陣r計算得到定位裝置坐標系相對于影像坐標系的平移矩陣t:t=pi-r·pc。
26、與現有技術相比,本發明的優點在于:
27、本發明的基于射頻線圈的核磁影像引導手術定位裝置及其配套定位方法,適用于核磁影像引導的機器人輔助神經外科穿刺消融治療或前列腺活檢取樣等微創介入手術領域。通過定位裝置解決核磁影像引導的機器人輔助介入外科手術中的手術器械定位問題。該定位裝置設計簡單且算法魯棒性高,僅需采集單張影像切片用于分析計算,就能輔助實現手術器械空間坐標系與核磁影像空間坐標系的配準以及手術器械的定位。本發明所提的系統相比于傳統的brown-roberts-wells框架能提供更多有效的三維標記點。此外,由于射頻線圈對標記信號的增強,使得標記易于檢測,因此具有更強的算法魯棒性,提高手術定位精度,更適用于神經外科穿刺、前列腺活檢等高精密醫療手術場景的應用。
技術特征:
1.一種基于射頻線圈的核磁影像引導手術定位裝置,其特征在于,包括實心塊(1),所述實心塊(1)的至少三個面設置有多個凹槽(2);各所述凹槽(2)內均安裝有填充造影劑的玻璃管(3),所述玻璃管(3)上纏繞有射頻線圈。
2.根據權利要求1所述的基于射頻線圈的核磁影像引導手術定位裝置,其特征在于,所述射頻線圈包括多圈環形纏繞的絕緣銅線組成的電感(4)和一個陶瓷片式電容器(5),所述電感(4)與所述電容器(5)并聯。
3.根據權利要求1所述的基于射頻線圈的核磁影像引導手術定位裝置,其特征在于,所述造影劑為濃度5%的硫酸銅溶液。
4.根據權利要求1或2或3所述的基于射頻線圈的核磁影像引導手術定位裝置,其特征在于,所述實心塊(1)為丙烯酸塑料制成的立方體,所述凹槽(2)位于所述立方體的三個相鄰面上,且其中兩個面相對設置。
5.一種基于權利要求1-4中任意一項所述的基于射頻線圈的核磁影像引導手術定位裝置的定位方法,其特征在于,包括步驟:
6.根據權利要求5所述的定位方法,其特征在于,在步驟s4中,根據預設質心點在定位裝置坐標系和影像坐標系中的坐標,得到兩坐標系的旋轉軸向量u,以及兩坐標系繞旋轉軸向量u的旋轉角度θ,進而得到定位裝置坐標系相對于影像坐標系的平移矩陣r。
7.根據權利要求6所述的定位方法,其特征在于,所述平移矩陣r的計算公式為:
8.根據權利要求6或7所述的定位方法,其特征在于,得到兩坐標系的旋轉軸向量u的具體過程為:
9.根據權利要求8所述的定位方法,其特征在于,旋轉角度θ的計算公式為:θ=arccos(n·n1)。
10.根據權利要求5或6或7所述的定位方法,其特征在于,步驟s5的具體過程為:
技術總結
本發明公開了一種基于射頻線圈的核磁影像引導手術定位裝置及定位方法,裝置包括一個實心塊,其三個相鄰面上分別設置有多個凹槽;各凹槽內均安裝有填充造影劑的玻璃管,管上纏繞有射頻線圈。定位方法步驟:獲取裝置的核磁影像;求解造影劑標記質心點的影像坐標;建立裝置坐標系,根據玻璃管的排布求解質心點在裝置坐標系下的坐標,得到裝置坐標系相對于影像坐標系的平移矩陣R和平移矩陣t;由于手術器械與裝置剛性連接,因此根據R和t得到手術器械坐標系與影像坐標系的空間轉換矩陣;由于器械尖端點在器械坐標系下的坐標已知,再基于空間轉換矩陣計算得到器械尖端點在核磁影像坐標系下的真實位置。本發明具有定位精準、魯棒性高等優點。
技術研發人員:肖昌炎,李騰,鄭文惠,蔡葳蕤,馬連波
受保護的技術使用者:湖南大學
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!