導管驅動裝置及手術機器人的制作方法
本技術涉及醫療器械,特別是涉及導管驅動裝置及手術機器人。
背景技術:
1、傳統血管介入手術需要術者長時間在手術室內操作器械來完成對患者的介入手術治療,因此會使得術者長期暴露在射線下,對術者身體造成傷害,此外血管介入手術很大程度上依賴術者的經驗,通常學習曲線較長,需要頻繁針對器械進行反復輸送操作和調整,從而達到較好的治療效果,但是這種頻繁反復的器械輸送和調整操作使得術者非常疲勞,而且手術操作的精準度往往波動很大,而且手術時常通常都會很長,對術者和患者都不是很有利,嚴重者還會造成很多因器械操作導致的不良事件發生,因此亟需一種基于遠程操控甚至是結合ai(人工智能)輔助的血管介入機器人來解決上述問題。
2、血管介入機器人通常包括一個遠程操控控制臺,一個機械臂,一個有源動力傳動艙,若干個與器械配合驅動器械遠程操作的無源適配器構成。常規血管介入手術經常會有轉動手柄轉輪實現器械某種功能的操作,例如轉動手柄轉輪實現導管調彎,支架大小調整,植入器械釋放,器械擋位調節,導管輸送或回撤,以及其它需要滿足的器械功能實現,因此針對器械手柄轉輪操作的血管介入機器人驅動裝置和方法需要解決,從而可以實現血管介入機器人遠程操控器械轉輪完成器械某種手術操作。
技術實現思路
1、基于此,本技術實施例提供一種導管驅動裝置及手術機器人,降低對醫護人員操作手術器械經驗的要求,以及保障手術的穩定性以及精準性,并提高手術的效率,壓縮手術的時長。
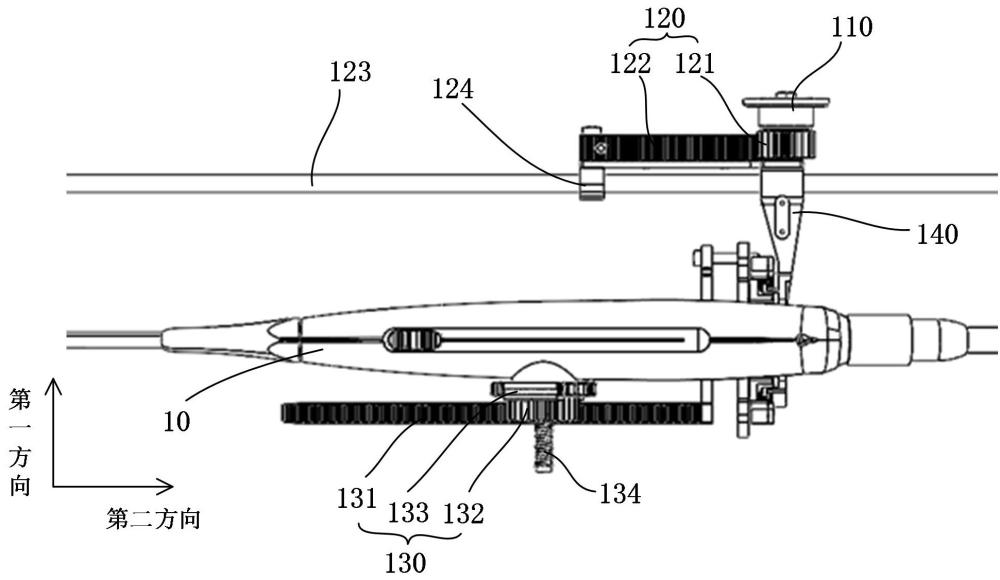
2、本技術實施例首先提供一種導管驅動裝置,用于與控制手柄的調彎輪連接,以驅動所述調彎輪轉動;所述導管驅動裝置包括:
3、動力機構,用于輸出扭矩;
4、主動傳動機構,包括旋轉組件和滑動組件,所述旋轉組件與所述動力機構的輸出端連接,所述滑動組件與所述旋轉組件活動連接,以將所述旋轉組件的旋轉運動轉換為直線運動;
5、從動傳動機構,包括移動組件、轉動組件和耦合組件,所述移動組件與所述滑動組件連接,所述轉動組件與所述移動組件活動連接,以將所述移動組件的直線運動轉換為旋轉運動;所述耦合組件設置于所述轉動組件,用于與所述調彎輪卡接。
6、在其中一個實施例中,所述旋轉組件在所述動力機構的驅動下繞第一方向轉動,以帶動所述滑動組件沿與所述第一方向相交的第二方向直線運動;
7、所述滑動組件帶動所述移動組件沿所述第二方向直線運動,所述移動組件驅動所述轉動組件沿所述第一方向轉動,以使所述耦合組件驅動所述調彎輪轉動。
8、在其中一個實施例中,所述旋轉組件包括主動齒輪,所述主動齒輪與所述動力機構的輸出端固定連接;
9、所述滑動組件包括從動齒條,所述從動齒條與所述主動齒輪相嚙合。
10、在其中一個實施例中,所述移動組件包括主動齒條,所述主動齒條與所述滑動組件連接;
11、所述轉動組件包括從動齒輪,所述從動齒輪與所述主動齒條相嚙合。
12、在其中一個實施例中,所述耦合組件包括至少一個耦合件,所述耦合件固定于所述從動齒輪的端面,所述耦合件設置有用于與所述調彎輪配合卡接部。
13、在其中一個實施例中,所述耦合件包括耦合塊,所述耦合塊一端固定于所述從動齒輪的外端面,另一端形成有所述卡接部;
14、所述卡接部包括形成在所述耦合塊上的耦合齒,所述耦合齒用于與所述調彎輪的外周面適配嚙合。
15、在其中一個實施例中,所述耦合組件包括兩個耦合塊,兩個所述耦合塊關于所述從動齒輪的軸線對稱分布。
16、在其中一個實施例中,所述從動傳動機構還包括支撐殼體和限位件,所述支撐殼體位于所述從動齒輪背離所述耦合組件的一側;
17、所述限位件沿所述第一方向延伸,所述限位件的一端與所述從動齒輪固定連接,另一端轉動設置于所述支撐殼體。
18、在其中一個實施例中,所述從動傳動機構還包括彈性件,所述彈性件套設于所述限位件,所述彈性件一端限位于所述支撐殼體,另一端限位于所述從動齒輪,所述彈性件用于使所述耦合組件與所述調彎輪抵接。
19、在其中一個實施例中,所述主動傳動機構還包括導向件,所述從動齒條滑動設置于所述導向件,所述導向件用于將所述從動齒條限位于所述第二方向。
20、在其中一個實施例中,所述主動傳動機構還包括對接板,所述對接板設置于所述從動齒條朝向所述移動組件的一側,所述對接板與所述從動齒條緊固連接;
21、所述對接板在背離所述從動齒條的一側設置有導向塊,所述導向塊適配套設于所述導向件。
22、在其中一個實施例中,所述動力機構包括安裝殼體;
23、所述主動傳動機構還包括導向輪,所述導向輪安裝于所述安裝殼體,所述導向輪用于與所述從動齒條背向所述主動齒輪的側面抵接。
24、在其中一個實施例中,所述導管驅動裝置還包括連接組件,所述連接組件連接于所述滑動組件和所述移動組件之間;
25、所述連接組件設置有用于避讓所述控制手柄的缺失部。
26、在其中一個實施例中,所述連接組件包括第一連接板和旋轉支撐板,所述第一連接板一端固定于滑動組件,另一端與所述旋轉支撐板扣合,所述旋轉支撐板能夠相對于所述第一連接板繞所述第二方向轉動。
27、在其中一個實施例中,所述連接組件還包括第二連接板,所述第二連接板與所述第一連接板沿所述第二方向間隔設置,所述第二連接板通過緊固件與所述旋轉支撐板固定連接;
28、所述第二連接板與所述移動組件固定連接。
29、本技術實施例還提供一種手術機器人,包括:
30、導管支撐器,構造有用于容納所述控制手柄的容納腔;
31、上述實施例中的導管驅動裝置,所述主動傳動機構和所述從動傳動機構分別位于所述導管支撐器的兩側,所述耦合組件位于所述容納腔內,以與所述控制手柄的調彎輪相卡接。
32、上述導管驅動裝置及手術機器人,通過動力機構驅動主動傳動機構將力傳遞至從動傳動機構,并通過從動傳動機構中的耦合組件驅動調彎輪的轉動,具體包括動力機構驅動旋轉組件轉動,移動組件將與其連接的旋轉組件的旋轉運動轉換為直線運動,隨后,與滑動組件連接的移動組件能夠在滑動組件的帶動下直線運動,轉動組件將與其連接的移動組件的直線運動轉換為旋轉運動,并將該轉動進一步傳遞至耦合組件,耦合組件能夠與控制手柄的調彎輪卡接,從而驅動調彎輪轉動,實現對導管的調彎操作。本技術中通過主動傳動機構和從動傳動機構中各個組件對力的傳遞,一方面,便于對作用于調彎輪處的力的大小進行調節,以實現對調彎輪的精確控制;另一方面,便于實現力的平衡和協同控制,使得控制手柄的調彎輪能夠更加穩定、可靠地工作,從而為相關手術提供更加精確、可靠地導管操控支持。另外,本技術中導管驅動裝置的提出能夠降低對醫護人員操作手術器械經驗的要求,減少醫護人員的體力消耗,而且能夠減弱現場操作的輻射對醫護人員造成的影響,有助于實現微創手術診療的智能化操作。醫護人員應用上述導管驅動裝置完成手術,還能夠保障手術的穩定性以及精準性,并提高手術的效率,壓縮手術的時長。
- 還沒有人留言評論。精彩留言會獲得點贊!