一種手部外骨骼的自適應控制方法、裝置、設備及介質
本發明涉及運動輔助及康復器械,特別是涉及一種手部外骨骼的自適應控制方法、裝置、設備及介質。
背景技術:
1、中樞神經系統或外周神經系統損傷可導致肢體特別是手部的感覺、運動功能出現異常。中樞系統損傷如腦出血、腦梗等腦卒中會出現肢體偏癱,表現為一側肢體痙攣,特別是手部無法完成抓握、張開動作,手指的觸覺下降。周圍神經系統損傷如全臂叢神經損傷、單根神經損傷,可出現手的整體或局部運動、感覺功能喪失。
2、隨著康復器械的技術研發與更新,輔助手部運動康復的外骨骼出現,可以對感覺運動障礙的手進行周期性康復治療,或日常佩戴提高手部的運動能力以完成生活和工作所需行為。目前采用電刺激聯合外骨骼輔助,其控制信號是通過感覺信息反饋至外骨骼,因此現有方法僅能實現外骨骼層面的閉環調控,無法實現人與外骨骼作為整體的閉環調控。
技術實現思路
1、本發明所要解決的技術問題是提供一種手部外骨骼的自適應控制方法、裝置、設備及介質,能夠實現人與外骨骼作為整體的閉環調控。
2、本發明解決其技術問題所采用的技術方案是:提供一種手部外骨骼的自適應控制方法,包括以下步驟:
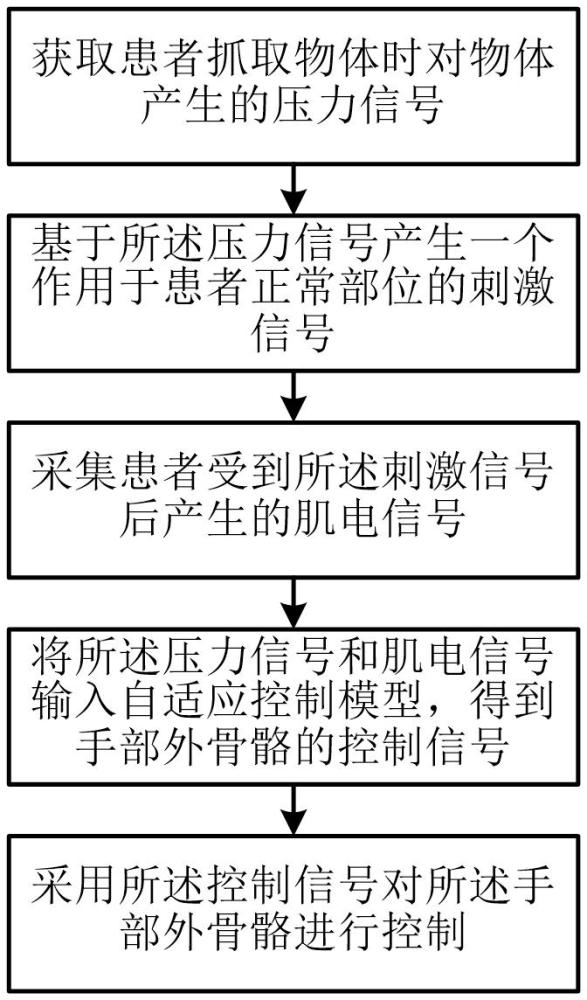
3、獲取患者抓取物體時對物體產生的壓力信號;
4、基于所述壓力信號產生一個作用于患者正常部位的刺激信號;
5、采集患者受到所述刺激信號后產生的肌電信號;
6、將所述壓力信號和肌電信號輸入自適應控制模型,得到手部外骨骼的控制信號;
7、采用所述控制信號對所述手部外骨骼進行控制。
8、所述刺激信號正比于所述壓力信號。
9、所述刺激信號與所述壓力信號之間呈線性增長或多級階梯式增長關系。
10、所述自適應控制模型包括:
11、第一編碼器模塊,用于從所述肌電信號中提取出肌電信號特征信息,并將肌電信號特征信息轉化為肌電序列數據;
12、第二編碼器模塊,用于從所述壓力信號中提取出壓力信號特征信息,并將壓力信號特征信息轉化為壓力序列數據;
13、雙向循環神經網絡模塊,用于根據所述肌電序列數據和壓力序列數據生成手部外骨骼的控制信號。
14、所述第一編碼器模塊和第二編碼器模塊均包括3層注意力層,所述注意力層用于識別序列數據中的關鍵時間點信息。
15、所述自適應控制模型輸入的信號窗長為0.8-1.2秒。
16、本發明解決其技術問題所采用的技術方案是:提供一種手部外骨骼的自適應控制裝置,包括:
17、壓力傳感器,用于獲取患者抓取物體時對物體產生的壓力信號;
18、刺激信號產生器,用于基于所述壓力信號產生一個作用于患者正常部位的刺激信號;
19、肌電信號采集器,用于采集患者受到所述刺激信號后產生的肌電信號;
20、控制信號生成器,用于將所述壓力信號和肌電信號輸入自適應控制模型,得到手部外骨骼的控制信號;
21、控制器,用于采用所述控制信號對所述手部外骨骼進行控制。
22、本發明解決其技術問題所采用的技術方案是:提供一種電子設備,包括存儲器、處理器及存儲在存儲器上并可在所述處理器上運行的計算機程序,所述處理器執行所述計算機程序時實現上述手部外骨骼的自適應控制方法的步驟。
23、本發明解決其技術問題所采用的技術方案是:提供一種計算機可讀存儲介質,其上存儲有計算機程序,所述計算機程序被處理器執行時實現上述手部外骨骼的自適應控制方法的步驟。
24、有益效果
25、由于采用了上述的技術方案,本發明與現有技術相比,具有以下的優點和積極效果:本發明將壓力信號轉換為物理刺激,同時將物理刺激后產生的肌電信號和壓力信號同時作為自適應控制模型的輸入,產生手部外骨骼的控制信號,本發明實現了將淺感覺轉換為深感覺,再由淺感覺和深感覺生成自適應控制參數,由于本發明中的肌電信號是經物理刺激后經肢體傳入大腦后產生,其與壓力信號集成后作為自適應控制模型的輸入,實現了人與外骨骼作為整體的閉環調控。
技術特征:
1.一種手部外骨骼的自適應控制方法,其特征在于,包括以下步驟:
2.根據權利要求1所述的手部外骨骼的自適應控制方法,其特征在于,所述刺激信號正比于所述壓力信號。
3.根據權利要求2所述的手部外骨骼的自適應控制方法,其特征在于,所述刺激信號與所述壓力信號之間呈線性增長或多級階梯式增長關系。
4.根據權利要求1所述的手部外骨骼的自適應控制方法,其特征在于,所述自適應控制模型包括:
5.根據權利要求4所述的手部外骨骼的自適應控制方法,其特征在于,所述第一編碼器模塊和第二編碼器模塊均包括3層注意力層,所述注意力層用于識別序列數據中的關鍵時間點信息。
6.根據權利要求1所述的手部外骨骼的自適應控制方法,其特征在于,所述自適應控制模型輸入的信號窗長為0.8-1.2秒。
7.一種手部外骨骼的自適應控制裝置,其特征在于,包括:
8.一種電子設備,包括存儲器、處理器及存儲在存儲器上并可在所述處理器上運行的計算機程序,其特征在于,所述處理器執行所述計算機程序時實現如權利要求1-6中任一所述手部外骨骼的自適應控制方法的步驟。
9.一種計算機可讀存儲介質,其上存儲有計算機程序,其特征在于,所述計算機程序被處理器執行時實現如權利要求1-6中任一所述手部外骨骼的自適應控制方法的步驟。
技術總結
本發明涉及一種手部外骨骼的自適應控制方法、裝置、設備及介質,其中,方法包括:獲取患者抓取物體時對物體產生的壓力信號;基于所述壓力信號產生一個作用于患者正常部位的刺激信號;采集患者受到所述刺激信號后產生的肌電信號;將所述壓力信號和肌電信號輸入自適應控制模型,得到手部外骨骼的控制信號;采用所述控制信號對所述手部外骨骼進行控制。本發明能夠實現人與外骨骼作為整體的閉環調控。
技術研發人員:徐文東,尹華偉,沈云東,邱彥群,馮俊濤,李鐵,許磊,汪洋
受保護的技術使用者:復旦大學
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!