一種手術機器人的關節位置校準方法與流程
本發明涉及手術機器人控制,更具體地,涉及一種手術機器人的關節位置校準方法。
背景技術:
1、手術機器人技術近年來發展迅速,已成為微創手術中的重要工具。這些機器人通過精確控制手術器械的運動,顯著提高了手術的精度和安全性,減少了手術創傷,縮短了患者的恢復時間。然而,手術機器人的廣泛應用也面臨著一些技術挑戰,其中最為關鍵的是關節位置的精確控制。
2、手術機器人的關節位置控制對于手術的成功至關重要。精確的關節位置信息不僅能夠確保手術器械的準確運動,還能支持復雜的手術任務自動化,例如組織切割、縫合和組織操縱。然而,手術機器人在實際應用中還需要面對一些實際操作問題。例如,手術過程中的負載變化、機器人歸位操作以及長時間運行中的機械疲勞等,都會對關節位置的準確性產生影響。這些問題不僅降低了手術機器人的操作精度,還可能增加手術風險。
3、現有的手術機器人關節位置校準方法主要包括基于模型的方法和基于視覺跟蹤的方法,基于模型的方法依賴于對機器人機械結構和動力學的精確建模,但這種方法在處理某些結構復雜的手術機器人(如關節數量較多的機器人或電纜驅動手術機器人等)時難以精確建模,導致校準的精度無法保證;基于視覺跟蹤的方法則需額外傳感器,且校準時間過長,效率低,無法滿足實時性的要求。
技術實現思路
1、本發明的目的是提出一種手術機器人的關節位置校準方法,實現對手術機器人的關節位置進行實時高效的自動化精確校準。
2、為實現上述目的,本發明提出了一種手術機器人的關節位置校準方法,包括:
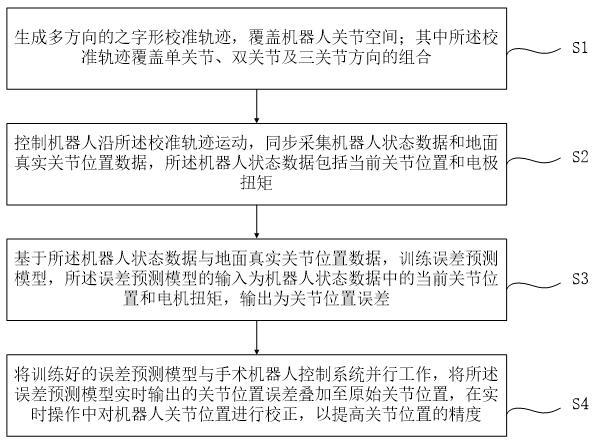
3、步驟s1:生成多方向的之字形校準軌跡,覆蓋機器人關節空間;其中所述校準軌跡覆蓋單關節、雙關節及三關節方向的組合;
4、步驟s2:控制機器人沿所述校準軌跡運動,同步采集機器人狀態數據和地面真實關節位置數據,所述機器人狀態數據包括當前關節位置和電極扭矩;
5、步驟s3:基于所述機器人狀態數據與地面真實關節位置數據,訓練誤差預測模型,所述誤差預測模型的輸入為機器人狀態數據中的當前關節位置和電機扭矩,輸出為關節位置誤差;
6、步驟s4:將訓練好的誤差預測模型與手術機器人控制系統并行工作,將所述誤差預測模型實時輸出的誤差疊加至原始關節位置,在實時操作中對機器人關節位置進行校正,以提高關節位置的精度。
7、可選地,在步驟s1中,所述之字形校準軌跡的生成方法為:
8、定義初始軌跡矩陣,其方向與機器人關節1的軸線對齊;
9、通過齊次變換矩陣和旋轉矩陣對初始軌跡矩陣進行平移和旋轉,生成不同方向的校準軌跡;
10、校準軌跡的稀疏度由以下公式定義:
11、其中,δs為軌跡稀疏度;r為關節運動范圍,r?=jmax-?jmin,jmax表示關節的最大允許位置,jmin表示關節的最小允許位置,單位:旋轉關節為度,平移關節為毫米;k∈{2,3,4,5,6}為稀疏度系數,用于控制軌跡密度;n∈{1,2,3}為軌跡方向維度,包括單方向、雙方向或三方向。
12、可選地,在步驟s2中,所述同步采集機器人狀態數據和地面真實關節位置數據包括:
13、通過電機編碼器推算獲得所述機器人狀態數據中的所述原始關節位置,通過電機電流命令線性映射獲得所述機器人狀態數據中的所述電極扭矩;
14、通過外部高精度編碼器測量獲得所述地面真實關節位置數據。
15、可選地,在步驟s3中,所述誤差預測模型包括深度神經網絡模型;
16、所述深度神經網絡模型的結構包括:輸入層、隱藏層和輸出層;
17、所述輸入層的維度為m,輸入為所述機器人狀態數據中的m個特征,包括當前關節位置和電極扭矩;
18、所述隱藏層包括2層全連接層,每層全連接層具有100個神經元,激活函數為sigmoid;
19、所述輸出層的維度為k,輸出機器人k個關節的位置誤差;
20、所述深度神經網絡模型的損失函數為:
21、其中,l為均方誤差,n?為訓練樣本數,為第?i個樣本的預測關節位置誤差,由dnn模型輸出,維度為m;為第?i?個樣本的真實關節位置誤差,計算公式為:,其中為通過外部高精度編碼器測量的第?i?個樣本的真實關節位置,為由電機編碼器推算的第?i?個樣本的原始關節位置。
22、可選地,在步驟s3中,所述誤差預測模型還包括線性回歸模型,其輸出誤差公式為:
23、其中,δqj為第j個關節的預測誤差,j=1,2…k;βj0為第j個關節的回歸截距項;βji為第j個關節的第i個輸入特征的回歸系數;xi為第i個輸入特征,xi=[qraw,τ],其中qraw為當前關節位置向量,τ為電機扭矩向量,m為輸入特征維度。
24、可選地,所述線性回歸模型的參數通過最小二乘法求解,計算公式為:
25、βj=(xtx)?1xtδqj
26、其中,j=1,2…k,βj?為第?j?個關節的回歸系數向量,其向量表示為:βj=[βj0,βj1,βj2,…,βjm] t;x?為輸入特征矩陣,δqj?為第?j?關節的誤差向量,t表示轉置。
27、可選地,所述誤差預測模型根據實時性需求動態切換為深度神經網絡模或線性回歸模型進行誤差預測。
28、可選地,在步驟s4中,實時校正的頻率為800?hz?-1200?hz。
29、可選地,校準后的關節位置通過以下公式計算:
30、qcalibrated=qraw+δq
31、其中,qcalibrated為校準后的關節位置向量,qraw為當前關節位置向量,δq為模型輸出的關節誤差向量。
32、可選地,在執行步驟s1之前,還包括:初始化手術機器人并執行歸位程序,使機器人探索關節極限并注冊電機編碼器,以獲取初始的關節位置信息。
33、本發明的有益效果在于:
34、本發明首先生成多方向的之字形校準軌跡,覆蓋機器人關節空間,然后控制機器人沿所述校準軌跡運動,并同步采集機器人狀態數據和地面真實關節位置數據,所述機器人狀態數據包括當前關節位置和電極扭矩,之后基于所述機器人狀態數據與地面真實關節位置數據,訓練誤差預測模型,將訓練好的誤差預測模型與手術機器人控制系統并行工作,將所述誤差預測模型實時輸出的誤差疊加至原始關節位置,在實時操作中對機器人關節位置進行校正,本方法通過訓練誤差預測模型,模型通過學習關節位置誤差模式,能夠有效補償由于負載變化和機械疲勞等因素導致的關節位置偏差,顯著提高手術機器人關節位置的校準精度,本發明的校準模型能夠與機器人控制系統并行工作,在實時操作中對關節位置進行校正,在顯著提高手術機器人關節位置校準精度的同時,大幅提升了校準效率和實時性,通過精確的關節位置校準,手術機器人能夠更準確地執行手術任務,減少人為誤差,提高手術的安全性和成功率。
35、本發明的系統具有其它的特性和優點,這些特性和優點從并入本文中的附圖和隨后的具體實施方式中將是顯而易見的,或者將在并入本文中的附圖和隨后的具體實施方式中進行詳細陳述,這些附圖和具體實施方式共同用于解釋本發明的特定原理。
- 還沒有人留言評論。精彩留言會獲得點贊!