控制水池自動清潔裝置沿水池邊界閉環行進的方法以及相應的水池自動清潔裝置與流程
本公開涉及水池清潔領域,具體涉及一種控制水池自動清潔裝置沿水池邊界閉環行進的方法以及相應的水池自動清潔裝置。
背景技術:
1、水池自動清潔裝置一般用于對水池的清潔,例如,對諸如泳池之類的水池的底部、側壁和/或水面上的垃圾/雜物進行收集和清理,以便對水池中的水體進行過濾和凈化。
技術實現思路
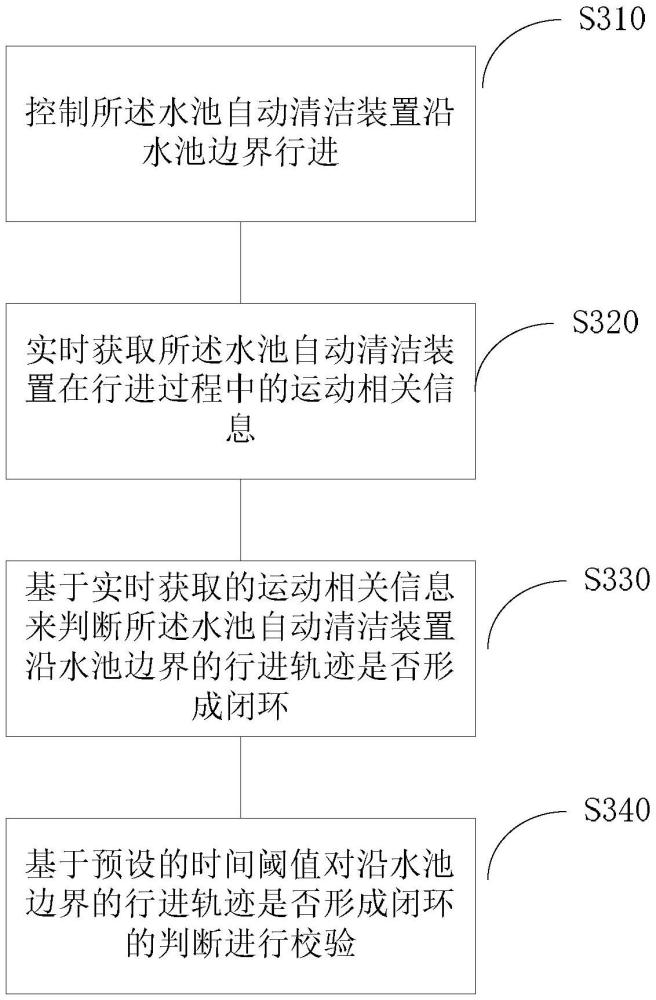
1、根據本公開的一方面,提出了一種控制水池自動清潔裝置沿水池邊界閉環行進的方法,包括:控制所述水池自動清潔裝置沿水池邊界行進;實時獲取所述水池自動清潔裝置在行進過程中的運動相關信息;基于實時獲取的運動相關信息來判斷所述水池自動清潔裝置沿水池邊界的行進軌跡是否形成閉環;以及基于預設的時間閾值對沿水池邊界的行進軌跡是否形成閉環的判斷進行校驗。
2、可選地,在上述方法中,所述預設的時間閾值包括最小行進時長閾值或者最大行進時長閾值中的至少一項。
3、可選地,在上述方法中,基于所述最小行進時長閾值,對行進軌跡是否形成閉環的判斷進行校驗,可以包括:若判斷行進軌跡已形成閉環,但行進時長小于所述最小行進時長閾值,則認定所述行進軌跡形成閉環的判斷為錯。
4、可選地,上述方法還可以包括:若認定所述行進軌跡形成閉環的判斷為錯,則控制所述水池自動清潔裝置繼續沿水池邊界行進,并重新判斷行進軌跡是否形成閉環。
5、可選地,在上述方法中,基于所述最大行進時長閾值,對行進軌跡是否形成閉環的判斷進行校驗,可以包括:若判斷行進軌跡未形成閉環,但行進時長超過或者等于最大行進時長閾值,則認定所述行進軌跡未形成閉環的判斷為錯。
6、可選地,上述方法還可以包括:若認定所述行進軌跡未形成閉環的判斷為錯,則確定當前的行進軌跡已形成閉環。
7、可選地,上述方法還可以包括:若經校驗確定所述行進軌跡已形成閉環,則控制所述清潔裝置停止行進或者改變行進模式。
8、可選地,在上述方法中,所述運動相關信息可以包括以下至少一項:所述水池自動清潔裝置的偏航角、所述水池自動清潔裝置的環境信息、所述水池自動清潔裝置的磁力計方向,或所述水池自動清潔裝置的定位信息。
9、可選地,在上述方法中,基于實時獲取的運動相關信息來判斷所述水池自動清潔裝置沿水池邊界的行進軌跡是否形成閉環可以包括:從獲取的所述水池自動清潔裝置在行進過程中的環境信息中提取環境特征信息;基于提取的環境特征信息,判斷水池自動清潔裝置沿水池邊界的行進軌跡是否形成閉環。
10、可選地,在上述方法中,基于實時獲取的運動相關信息來判斷所述水池自動清潔裝置沿水池邊界的行進軌跡是否形成閉環可以包括:對獲取的偏航角進行累加;以及基于累加的偏航角的值,判斷水池自動清潔裝置沿水池邊界的行進軌跡是否形成閉環。
11、可選地,在上述方法中,基于實時獲取的運動相關信息來判斷所述水池自動清潔裝置沿水池邊界的行進軌跡是否形成閉環可以包括:基于獲取的定位信息與預設的地圖信息的比較,判斷水池自動清潔裝置沿水池邊界的行進軌跡是否形成閉環。
12、可選地,在上述方法中,基于實時獲取的運動相關信息來判斷所述水池自動清潔裝置沿水池邊界的行進軌跡是否形成閉環可以包括:基于獲取的磁力計方向的變化情況,判斷所述水池自動清潔裝置沿水池邊界的行進軌跡是否形成閉環。
13、可選地,在上述方法中,可以通過慣性測量單元imu獲取所述偏航角。
14、可選地,在上述方法中,可以通過激光雷達、超聲波傳感器、tof傳感器、或視覺傳感器中的至少一項獲取所述環境信息。
15、可選地,在上述方法中,所述最小行進時長閾值可以取決于以下至少一項:水池邊界的長度、水池自動清潔裝置行進的速度或水池自動清潔裝置的工作模式。
16、根據本公開的另一方面,提出了一種水池自動清潔裝置,其可以包括:至少一個處理器;存儲器,存儲可執行的指令;所述至少一個處理器被配置為,在執行存儲器存儲的可執行指令時,使得所述水池自動清潔裝置實施上述方法。
技術特征:
1.一種控制水池自動清潔裝置沿水池邊界閉環行進的方法,包括:
2.根據權利要求1所述的方法,其中,
3.根據權利要求2所述的方法,其中,基于所述最小行進時長閾值,對行進軌跡是否形成閉環的判斷進行校驗,包括:若判斷行進軌跡已形成閉環,但行進時長小于所述最小行進時長閾值,則認定所述行進軌跡形成閉環的判斷為錯。
4.根據權利要求3所述的方法,還包括,若認定所述行進軌跡形成閉環的判斷為錯,則控制所述水池自動清潔裝置繼續沿水池邊界行進,并重新判斷行進軌跡是否形成閉環。
5.根據權利要求2所述的方法,其中,基于所述最大行進時長閾值,對行進軌跡是否形成閉環的判斷進行校驗,包括:若判斷行進軌跡未形成閉環,但行進時長超過或者等于最大行進時長閾值,則認定所述行進軌跡未形成閉環的判斷為錯。
6.根據權利要求5所述的方法,其中,若認定所述行進軌跡未形成閉環的判斷為錯,則確定當前的行進軌跡已形成閉環。
7.根據權利要求2-5中任一項所述的方法,還包括,若經校驗確定所述行進軌跡已形成閉環,則控制所述清潔裝置停止行進或者改變行進模式。
8.根據權利要求1所述的方法,其中,所述運動相關信息包括以下至少一項:所述水池自動清潔裝置的偏航角、所述水池自動清潔裝置的環境信息、所述水池自動清潔裝置的磁力計方向,或所述水池自動清潔裝置的定位信息。
9.根據權利要求8所述的方法,其中,基于實時獲取的運動相關信息來判斷所述水池自動清潔裝置沿水池邊界的行進軌跡是否形成閉環包括:
10.根據權利要求8所述的方法,其中,基于實時獲取的運動相關信息來判斷所述水池自動清潔裝置沿水池邊界的行進軌跡是否形成閉環包括:
11.根據權利要求8所述的方法,其中,基于實時獲取的運動相關信息來判斷所述水池自動清潔裝置沿水池邊界的行進軌跡是否形成閉環包括:
12.根據權利要求8所述的方法,其中,基于實時獲取的運動相關信息來判斷所述水池自動清潔裝置沿水池邊界的行進軌跡是否形成閉環包括:
13.根據權利要求8所述的方法,其中,通過慣性測量單元imu獲取所述偏航角;通過激光雷達、超聲波傳感器、tof傳感器、或視覺傳感器中的至少一項獲取所述環境信息。
14.根據權利要求2-5任一項所述的方法,其中,所述最小行進時長閾值取決于以下至少一項:水池邊界的長度、水池自動清潔裝置行進的速度或水池自動清潔裝置的工作模式。
15.一種水池自動清潔裝置,包括:
技術總結
提出了一種控制水池自動清潔裝置沿水池邊界閉環行進的方法以及相應的水池自動清潔裝置。所述方法包括:控制所述水池自動清潔裝置沿水池邊界行進;實時獲取所述水池自動清潔裝置在行進過程中的運動相關信息;基于實時獲取的運動相關信息來判斷所述水池自動清潔裝置沿水池邊界的行進軌跡是否形成閉環;以及基于預設的時間閾值對沿水池邊界的行進軌跡是否形成閉環的判斷進行校驗。
技術研發人員:唐顧杰
受保護的技術使用者:深圳市元鼎智能創新有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!