自移動機器人及其行走方法與流程
本申請涉及電子設備,尤其涉及一種自移動機器人及其行走方法。
背景技術:
1、隨著科學技術的不斷發展,家用電器越來越智能化。智能家電為用戶的工作生活學習帶來了很大的便利,自移動機器人就是一種。自移動機器人能憑借一定的人工智能,自動在房間內完成地板清理工作。
2、目前,有些自移動機器人的驅動輪能根據地面的情況變化進行浮動調節從而提高機器人的越障能力。但現有浮動越障結構能提供給驅動輪的驅動力較小,機器人僅能越過較小的障礙,越障能力非常有限。
技術實現思路
1、鑒于上述問題,提出了本申請以便解決上述問題或至少部分地解決上述問題的自移動機器人及其行走方法。
2、于是,在本申請的一個實施例中,提供了一種自移動機器人。該自移動機器人包括:機體、驅動輪組件及越障組件;所述驅動輪組件通過第一旋轉軸可旋轉的設置在所述機體上;所述驅動輪組件包括驅動輪;所述驅動輪相對所述機體從第一位置移動至第二位置過程中,所述越障組件施力于所述驅動輪組件,所述驅動輪與行進面之間的正壓力變化幅度小于或等于設定閾值。
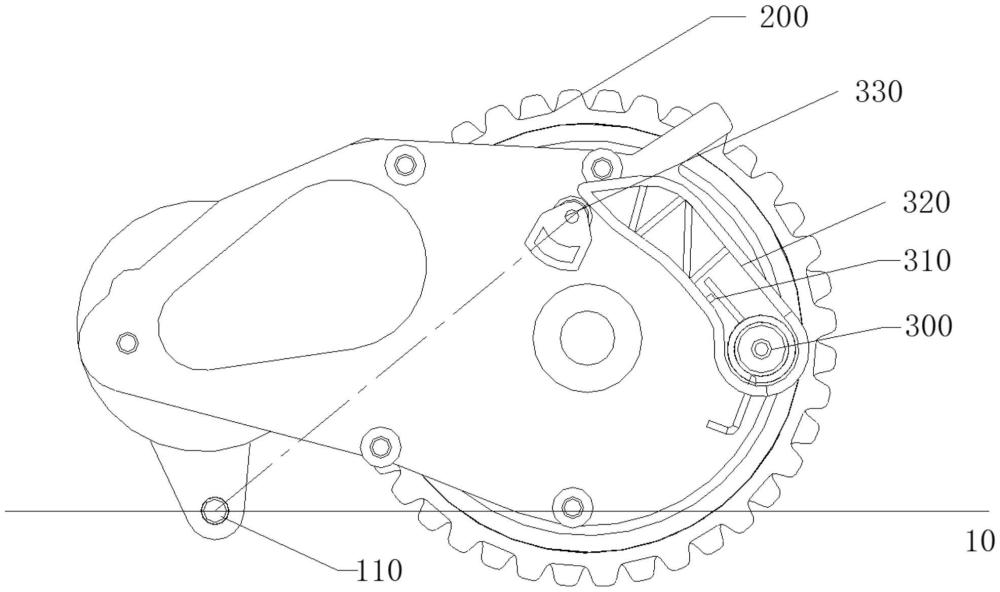
3、在本申請的另一個實施例中,提供了一種自移動機器人。該自移動機器人包括:機體、驅動輪組件及越障組件;其中,所述驅動輪組件通過第一旋轉軸可旋轉的設置在所述機體上;所述驅動輪組件包括驅動輪;所述越障組件包括施力部及設置在所述驅動輪組件上的受力部;所述施力部包括動力件及通過第二旋轉軸可旋轉的設置在所述機體上的壓板;所述受力部位于所述第一旋轉軸與所述第二旋轉軸之間;所述驅動輪相對所述機體從第一位置移動至第二位置過程,所述壓板在所述動力件的作用下與所述受力部相抵頂,以施力于所述驅動輪組件。
4、在本申請的另一個實施例中,還提供了一種自移動機器人。該自移動機器人包括:機體、驅動輪組件及越障組件;其中,所述驅動輪組件通過第一旋轉軸可旋轉的設置在所述機體上;所述驅動輪組件包括驅動輪;所述越障組件包括施力部及設置在所述驅動輪組件上的受力部;所述施力部包括在彈性體;沿形變方向,所述彈性體的一端固定在所述機體上,另一端設有滾輪組件;所述受力部具有曲面結構;所述驅動輪從第一位置移動至第二位置過程中,所述滾輪組件在所述彈性體的作用下抵頂在所述曲面結構上,以施力于所述驅動輪組件。
5、在本申請的又一個實施例中,還提供了一種自移動機器人的行走方法。
6、該方法包括:
7、遇到障礙時,驅動輪組件的驅動輪相對機體從第一位置移動至第二位置;
8、所述驅動輪從所述第一位置移動至所述第二位置過程中,越障組件施力于所述驅動輪組件,所述驅動輪與行進面之間的正壓力變化幅度小于或等于設定閾值。
9、本申請實施例提供的一自移動機器人實施例中,在自移動機器人遇到障礙機體被頂起或行走至凹坑處時,驅動輪組件除受自身重力外,還受到越障組件施加的作用力;在這些力的共同作用下,驅動輪與行進面之間的正壓力變化幅度小于或等于設定閾值,進而有助于增加驅動輪與行進面之間的摩擦力,提高自移動機器人的越障能力。
10、本申請實施例提供的另一自移動機器人實施例中,采用通過第二旋轉軸可旋轉設置在機體上的壓板,壓板在動力件的作用下與驅動輪組件上的受力部,使得驅動輪組件受到持續作用力;另外,采用該結構,極易控制向驅動輪組件施加的持續作用力的大小,使得驅動輪與行進面之間的正壓變化幅度被控制在一個較小的范圍,驅動輪與行進面之間的摩擦力也較為穩定,有助于提高自移動機器人的越障能力。
11、在本申請實施例提供的又一自移動機器人實施例中,設置在機體上的彈性體在自身彈力的作用下通過曲面結構相驅動輪組件施加持續作用力;該結構通過彈簧的選型和/或改變曲面結構的曲面形狀,即可輕易的實現對向驅動輪組件施加的持續作用力的控制,使得驅動輪與行進面之間的正壓變化幅度被控制在一個較小的范圍,驅動輪與行進面之間的摩擦力也較為穩定,有助于提高自移動機器人的越障能力。
12、在本申請實施例提供的一自移動機器人的行走方法實施例中,遇到障礙時,驅動輪從第一位置移動至第二位置過程中,越障組件持續施力于驅動輪組件,驅動輪與行進面之間的正壓力變化幅度小于或等于設定閾值,從而增加了驅動輪與行進面之間的摩擦力,增強了自移動機器人的越障能力。
技術特征:
1.一種自移動機器人,其特征在于,包括:機體、驅動輪組件及越障組件;
2.根據權利要求1所述的自移動機器人,其特征在于,所述施力部包括壓板和動力件;
3.根據權利要求2所述的自移動機器人,其特征在于,所述壓板與所述受力部抵頂的一側包含一段弧形的壓力段。
4.根據權利要求2所述的自移動機器人,其特征在于,所述驅動輪處于第一位置時,所述壓板對受力部施加作用力的方向線通過第一旋轉軸。
5.根據權利要求2所述的自移動機器人,其特征在于,所述驅動輪處于第一位置時,所述受力部和所述第一旋轉軸的連線與所述壓板對所述受力部施加作用力的方向線存在一夾角a。
6.根據權利要求2所述的自移動機器人,其特征在于,所述動力件為套設在第二旋轉軸上的扭簧,所述扭簧的一端與所述壓板相抵頂。
7.根據權利要求2所述的自移動機器人,其特征在于,所述壓板包括與受力部抵頂的施力端以及產生動力的動力端;
8.根據權利要求7所述的自移動機器人,其特征在于,所述動力件還包括設置在所述機體上的第三磁鐵,所述第三磁鐵位于所述第一磁鐵上方,所述第三磁鐵與所述第一磁鐵之間為吸力。
9.根據權利要求1所述的自移動機器人,其特征在于,所述施力部包括彈性體;
10.根據權利要求9所述的自移動機器人,其特征在于,所述滾輪組件包括滾輪支架與第二滾輪;
11.一種自移動機器人,其特征在于,包括:機體、驅動輪組件及越障組件;其中,
12.一種自移動機器人,其特征在于,包括:機體、驅動輪組件及越障組件;所述驅動輪組件通過第一旋轉軸可旋轉的設置在所述機體上;
13.一種自移動機器人的行走方法,其特征在于,包括:
14.根據權利要求13所述的方法,其特征在于,所述第一設定值為零。
技術總結
本申請實施例提供一種自移動機器人及其行走方法,所述自移動機器人包括機體、驅動輪組件及越障組件;所述驅動輪組件通過第一旋轉軸可旋轉的設置在所述機體上;所述驅動輪組件包括驅動輪;所述越障組件包括施力部,所述驅動輪組件上設有受力部;所述施力部設置所述機體上;所述受力部位于所述施力部與所述第一旋轉軸之間;所述施力部施力于所述受力部,使得所述驅動輪組件相對所述機體移動。本申請提供的技術方案中,受力部位于施力部與第一旋轉軸之間,施力部的作用效率高,有助于提高自移動機器人的越障能力。
技術研發人員:程文杰,侯杰
受保護的技術使用者:科沃斯機器人股份有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!