一種高速鐵路無砟軌道支撐層自動振搗找平裝置及方法與流程
本發明涉及混凝土振搗找平,具體公開了一種高速鐵路無砟軌道支撐層自動振搗找平裝置及方法。
背景技術:
1、隨著高速列車的速度越來越快,對高速鐵路無砟軌道的平面度和結構強度要求也越來越高,無砟軌道施工時,首先將支撐模板固定,然后將攪拌完成的混凝土倒入模板內,然后通過振搗棒對混凝土進行振搗,排除氣泡并增加密度,混凝土干燥后,需要小心地將模具從混凝土上剝離,同時需要對混凝土進行養護,使其能夠達到設計的強度和耐久性,以保證高速列車能夠在無砟軌道上平穩的行駛;現有的無砟軌道施工均是靠人工完成,對工作人員的要求較高,同時工作人員施工的效率較低。
2、如專利號為2023208923809的發明專利公開了一種人行道混凝土振搗找平工具,包括2條橫梁,2條橫梁之間依次固定連接有可伸縮和鎖定的第一縱梁、第二縱梁、第三縱梁,第一縱梁和第二縱梁下方連接有用于對混凝土找平的找平組件,第三縱梁連接有用于對混凝土進行振搗的振搗組件,橫梁底部固定連接有支桿,支桿的底部設置有行走輪;現有的混凝土振搗找平裝置在使用時,使用找平組件對混凝土進行找平,當混凝土平面的平整度或者坡度不符合標準時,需要進行補料,而現有的混凝土振搗找平裝置在無法進行補料,需要靠人工將需要補料的區域找平。
技術實現思路
1、有鑒于此,本發明的目的在于提供一種高速鐵路無砟軌道支撐層自動振搗找平裝置及方法,以解決現有的混凝土振搗找平裝置無法進行補料,需要靠人工將需要補料的區域找平的技術問題。
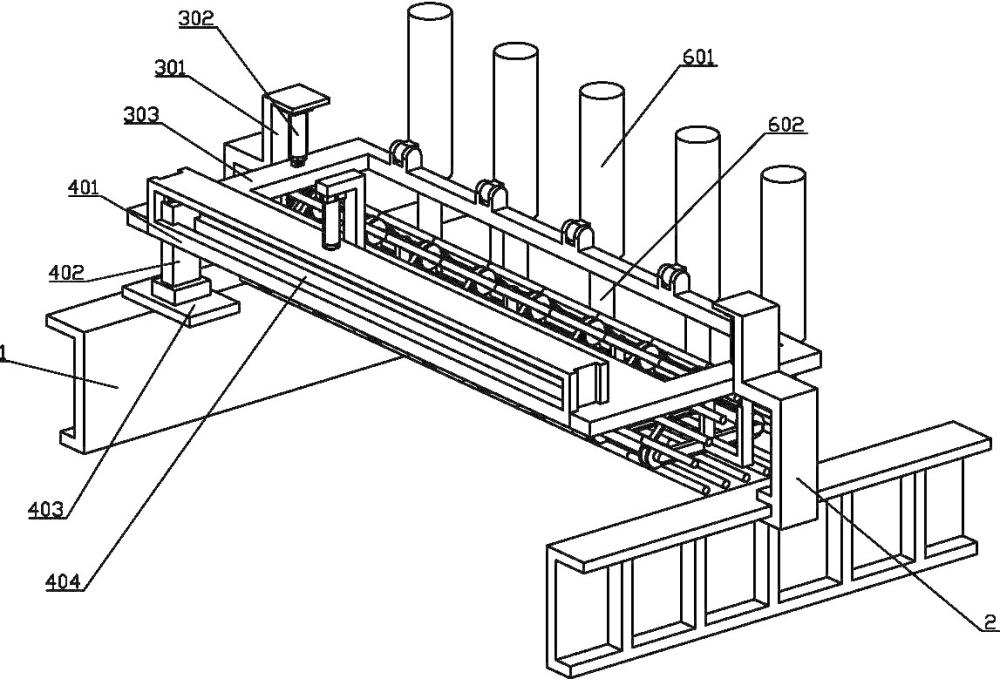
2、為達到上述目的,本發明提供如下技術方案:一種高速鐵路無砟軌道支撐層自動振搗找平裝置,包括兩組支撐模板,兩組所述支撐模板之間設置有可升降的固定平臺,所述固定平臺一側設置有用于振搗混凝土的振搗機構,所述固定平臺下方設置有用于對混凝土表面進行找平的找平機構,所述固定平臺另端設置有用于抹平混凝土表面的補料找平機構;所述固定平臺底端設置有固定塊,所述固定塊上固定連接有激光雷達掃描儀,所述激光雷達掃描儀與控制面板連接。通過振搗機構與找平機構,對混凝土進行振搗和找平,激光雷達掃描儀能夠檢測混凝土表面的平整度與坡度是否達標。
3、進一步的,所述找平機構包括有若干組水平分布的抹平組件,所述抹平組件包括三組傳動輪,三組所述傳動輪通過傳動帶連接,三組所述傳動輪呈三角形,所述傳動帶上設置有若干組第一固定柱和第二固定柱;若干組所述第一固定柱與若干組所述第二固定柱互相交錯,所述第一固定柱中段與所述傳動帶固定,所述第二固定柱其中一端與所述傳動帶固定;位于兩端所述抹平組件上的所述第一固定柱和所述第二固定柱上均設置有第三固定柱,所述第三固定柱一端與所述支撐模板接觸。通過三組傳動輪和傳動帶配合,使若干組第一固定柱和第二固定柱對混凝土表面進行反復的抹平,同時第一固定柱與第二固定柱配合,能夠避免兩組第一固定柱或第二固定柱之間的縫隙不能對混凝土表面抹平,使混凝土表面出現細小的凸起,從而能夠保證混凝土表面的平整度達標。
4、進一步的,所述抹平組件位于梁架組件上,所述梁架組件包括有兩組連接架,兩組所述連接架分別固定連接在所述固定平臺兩側,兩組所述連接架之間設置有兩組第一連接桿,兩組所述連接架上分別設置有第一連接塊和第二連接塊,所述第一連接塊與所述第二連接塊之間設置有可轉動的第二連接桿;所述抹平組件上其中兩組傳動輪分別穿裝在兩組所述第一連接桿上,另一組所述傳動輪固定連接在所述第二連接桿上。通過梁架組件將抹平組件固定,能夠保證若干組抹平組件同步運動,從而保證混凝土表面找平后的平整度達標。
5、進一步的,所述梁架組件上設置有驅動組件,所述驅動組件包括第三支撐座,所述第三支撐座上固定連接有第二驅動電機,所述第二驅動電機輸出軸固定連接有第三齒輪,所述第二連接桿一端固定連接有第二齒輪,所述第二齒輪與所述第三齒輪嚙合。通過驅動組件,能夠帶動抹平組件運行,達到自動對混凝土找平的目的。
6、進一步的,兩組所述支撐模板上均滑動卡裝有活動架,所述活動架與所述支撐模板之間設置有用于移動活動架的行走機構;所述活動架上設置有第一支撐座,所述第一支持座與所述固定平臺之間設置有第一液壓缸,兩組所述第一液壓缸分別位于所述固定平臺兩側。活動架通過行走機構在支撐模板上移動,活動架移動帶動固定平臺移動,配合振搗機構和找平機構,能夠對支撐模板內所有的混凝土進行振搗和找平。
7、進一步的,所述振搗機構包括固定套,所述固定套鉸接在所述固定平臺上,所述固定套內穿裝有振搗棒,所述振搗棒與所述固定套底面之間設置有第三液壓缸。振搗棒位于固定套內,配合第三液壓缸,能夠滿足振搗棒在伸入混凝土內時插入時要快,拔出時要慢的原則,同時在振搗棒不需要使用時,可以將其放平,使自動振搗找平裝置方便運輸。
8、進一步的,所述補料找平機構包括第一固定架,所述第一固定架上設置有第二固定架,所述第二固定架滑動卡裝在所述固定平臺上,所述固定平臺上設置有第二支撐座,所述第二支撐座與所述第二固定架之間設置有第二液壓缸;所述第一固定架上滑動卡裝有滑塊,所述滑塊底端設置有平面振動器,所述滑動塊與所述第二固定架之間設置有水平移動組件。補料找平機構能夠對表面平整度或者坡度達標的地方進行調整,配合工作人員將適量的混凝土倒入需要補料的區域,對新倒入的混凝土進行抹平,是混凝土表面的平整度和坡度達標。
9、進一步的,所述水平移動組件包括有第一驅動電機,所述第一驅動電機固定連接在所述滑塊上,所述第一驅動電機輸出軸設置有第一齒輪,所述第二固定架上設置有齒條,所述齒輪與所述齒條嚙合。水平移動組件能夠帶動平面振動器移動,配合行走機構,使平面振動器在能夠移動至水平面內的任意位置,從而對補料的區域進行抹平,保證混凝土表面的平整度和坡度。
10、一種高速鐵路無砟軌道支撐層自動振搗找平裝置使用方法,包括以下步驟:
11、s1:首先旋轉固定套,將固定套旋轉至豎直,然后通過第三液壓缸帶動振搗棒下降,使振搗棒插入混凝土內10cm,對混凝土進行振搗,振搗一定的時間后,通過第三液壓缸帶動振搗棒上升,使振搗棒與混凝土分離;然后啟動行走機構,行走機構移動一段距離后停止,再次對混凝土進行振搗,以此往復,完成對混凝土的振搗;
12、s2:然后旋轉固定套,直至固定套第一端與固定平臺接觸,此時固定套水平,然后通過行走機構將自動振搗找平裝置移動至初始位置;
13、s3:通過兩組第一液壓缸帶動固定平臺下降,同時根據無砟軌道支撐層的坡度,調整固定平臺的傾斜度,同時將第一固定柱與第二固定柱移動至指定位置;
14、s4:啟動第二驅動電機,第二驅動電機輸出軸通過第三齒輪帶動第二齒輪和第二連接桿旋轉,第二連接桿通過若干組傳動輪帶動若干組傳動帶同步旋轉,傳動帶帶動第一固定柱和第二固定柱移動,對混凝土進行找平;同時通過行走機構帶動自動振搗找平裝置移動,完成對混凝土表面的進行找平;
15、s5:開啟激光雷達掃描儀與控制面板,對找平后完成的混凝土進行平整度和坡度的檢測,通過控制面板上相應的顏色提示,能夠精準的判斷出需要補料的區域。
16、s6:工作人員向補料區域內加入適量的混凝土,然后啟動第一驅動電機,第一驅動電機輸出軸帶動第一齒輪旋轉,使第一齒輪在齒條上移動,帶動滑塊和平面振動器移動,直至平面振動器位于補料的區域上方時,行走機構停止,通過第二液壓缸帶動平面振動器下降,直至平面振動器移動至指定的高度,通過平面振動器將區域內的補料抹平,然后通過第二液壓缸帶動平面振動器上升,使平面振動器與混凝土表面分離,對補料的區域進行抹平。
17、使用時,通過工作人員手動將振搗機構旋轉至豎直,配合第三液壓缸與振搗棒,對混凝土自動進行振搗,自動振搗找平裝置通過行走機構在支撐模板上移動,第一遍對混凝土進行振搗,然后將自動振搗找平裝置移動初始位置,通過找平機構對混凝土表面進行找平,多余的混凝土會被找平機構帶走,同時激光雷達掃描儀對找平完成的混凝土表面進行檢測,保證混凝土表面的平整度和坡度達標,如若混凝土表面的平整度和坡度不達標,工作人員將適量的混凝土放置在缺料的區域,通過補料找平機構對新加入混凝土的區域進行抹平,從而保證混凝土表面的坡度和平整度達標。
18、本方案的工作原理及有益效果在于:
19、使用時,自動振搗找平裝置需要在支撐模板上行走兩遍,第一遍是對混凝土進行振搗,消除混凝土中的氣泡,并且使混凝土變得更加密實,保證混凝土凝固后的強度達標,第二遍是對混凝土進行找平,使混凝土的平整度和坡度達到標準,保證高速列車在行駛時的平穩性;在對混凝土進行振搗時,需要將振搗機構旋轉至豎直,然后通過伸縮第三液壓缸控制振搗棒插入和拔出混凝土內,使振搗棒對混凝土進行振搗,在對混凝土進行振搗時,需要控制振搗棒插入的深度為10cm,振搗的時間控制在30秒,并且插入時要快,拔出時要慢。
20、對混凝土進行找平時,首先使用找平機構對混凝土表面進行找平,然后通過激光雷達掃描儀對找平后的混凝土表面進行掃描,掃描的結果由控制面板顯示,工作人員可以通過觀察控制面板,觀察混凝土表面是否出現平整度不達標的區域,出現后,需要工作人員將適量的混凝土倒在不平整的區域,再通過補料找平機構對后加入的混凝土進行抹平,保證混凝土表面的平整度達標,能夠自動對混凝土表面需要補料的區域進行自動找平。
- 還沒有人留言評論。精彩留言會獲得點贊!