一種機器人用的防撞裝置
本技術涉及機器人防撞,尤其涉及一種機器人用的防撞裝置。
背景技術:
1、現有的機器人上并未設置防撞機構,當碰撞障礙物時,碰撞會不經過緩沖,作用于機器人本體上,對機器人本體造成損失。
2、為解決以上問題,現有公開專利(cn211220787u)公開了一種智能機器人用的防撞裝置,包括機器人本體,所述機器人本體外水平套設有防護圈框,所述防護圈框與機器人本體之間均勻設有多根彈簧伸縮桿,多根所述彈簧伸縮桿在水平方向傾斜設置,所述彈簧伸縮桿上套設有緩沖彈簧,所述緩沖彈簧兩端分別與彈簧伸縮桿的兩端固定連接,所述機器人本體與防護圈框之間環繞均布有多個第二緩沖彈簧,所述第二緩沖彈簧一端與機器人本體固定連接,所述第二緩沖彈簧另一端與防護圈框固定連接,所述防護圈框遠離機器人本體的弧形側壁上設有緩沖結構。本技術方案可以對機器人進行全方位的防撞保護。
3、但現有的機器人用的防撞裝置的結構較為簡單,當機器人與障礙物發生碰撞時,不能控制機器人遠離障礙物,實現自動躲避障礙物的功能。
技術實現思路
1、本實用新型的目的在于提供一種機器人用的防撞裝置,旨在解決現有的機器人用的防撞裝置的結構較為簡單,當機器人與障礙物發生碰撞時,不能控制機器人遠離障礙物,實現自動躲避障礙物的功能的技術問題。
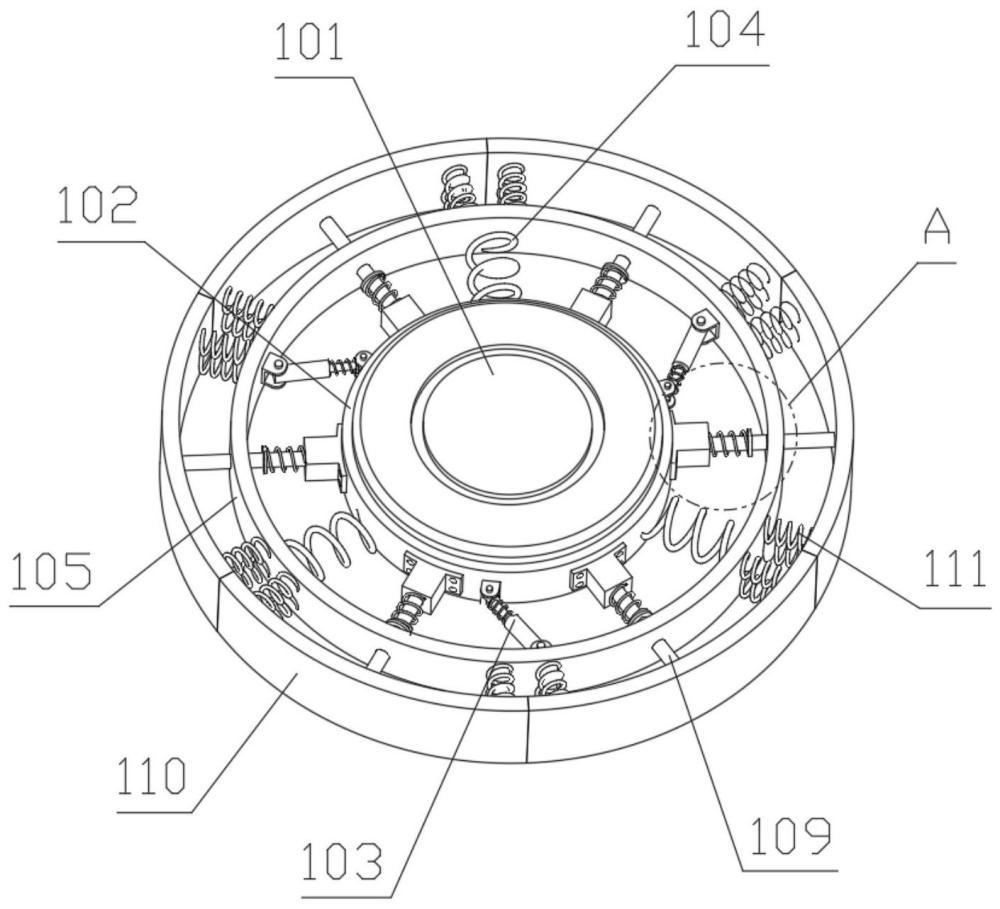
2、為實現上述目的,本實用新型提供了一種機器人用的防撞裝置,包括機器人本體、安裝框、多個彈簧伸縮桿、多個緩沖彈簧、防撞外框和偏離控制機構,所述機器人本體的外側壁上設置有所述安裝框,所述安裝框的外部設置有所述防撞外框,所述防撞外框的內側壁與所述安裝框的外側壁之間設置有多個所述緩沖彈簧和多個所述彈簧伸縮桿,所述緩沖彈簧和所述彈簧伸縮桿呈交錯結構設置,所述緩沖彈簧固定安裝在所述安裝框與所述防撞外框之間,所述彈簧伸縮桿呈傾斜結構設置,所述彈簧伸縮桿鉸接安裝在所述安裝框與所述防撞外框之間;
3、所述偏離控制機構包括多個安裝座、多個壓力傳感器、多個伸縮彈簧、多個伸縮探桿和多個弧形受壓板,所述安裝框的外側壁均勻設置有多個所述安裝座,每個所述安裝座分別位于對應的所述緩沖彈簧和所述彈簧伸縮桿之間,每個所述安裝座靠近所述安裝框的一端的內部均設置有所述壓力傳感器,每個所述安裝座遠離所述安裝框的一端均滑動設置有所述伸縮探桿,所述壓力傳感器的受壓端貼近所述伸縮探桿位于所述安裝座的內部的一端,所述伸縮探桿的外部與對應的所述安裝座的端部之間設置有所述伸縮彈簧,所述伸縮探桿遠離所述安裝座的一端貫穿所述防撞外框,所述伸縮探桿遠離所述安裝座的一端設置有所述弧形受壓板。
4、其中,每個所述弧形受壓板的四個端角處均設置有連接彈簧,所述連接彈簧遠離所述弧形受壓板的一端與所述防撞外框的外側壁相連。
5、其中,每個所述安裝座靠近所述安裝框的一端均設置有固定翼板,所述固定翼板與所述安裝框的外側壁拆卸連接。
6、其中,每個所述伸縮探桿的外部均設置有安裝環,所述伸縮彈簧的一端與所述安裝環固定連接,所述伸縮彈簧的另一端與對應的所述安裝座的端部固定連接。
7、其中,每個所述伸縮探桿位于對應的所述安裝座的內部均設置有限位塊,所述限位塊的直徑大于所述安裝座的端部上設置的滑動孔的直徑。
8、其中,所述機器人用的防撞裝置還包括多個緩沖海綿,每個所述弧形受壓板遠離所述防撞外框的一面均設置有所述緩沖海綿。
9、其中,每個所述緩沖海綿的內側壁上均設置有第一粘接層,每個所述弧形受壓板的外側壁上均設置有第二粘接層,所述第二粘接層與所述第一粘接層相適配。
10、本實用新型的一種機器人用的防撞裝置,當所述機器人本體與障礙物發生碰撞時,與障礙物接觸的所述弧形受壓板受到碰撞時產生的力,通過所述弧形受壓板將碰撞時產生的力傳遞至所述伸縮探桿處,所述伸縮探桿受力在對應的所述安裝座的端部滑動,所述伸縮探桿位于對應的所述安裝座的內部的一端擠壓到對應的所述壓力傳感器的受壓端,通過當前所述壓力傳感器向所述機器人本體的控制終端傳遞受壓信號,表明所述機器人本體在當前方向發生碰撞,所述機器人本體的控制終端向行走機構發出遠離當前方向的信號,從而使得所述機器人本體向遠離障礙物的方向移動,進而實現自動躲避障礙物的功能。
技術特征:
1.一種機器人用的防撞裝置,包括機器人本體、安裝框、多個彈簧伸縮桿、多個緩沖彈簧和防撞外框,所述機器人本體的外側壁上設置有所述安裝框,所述安裝框的外部設置有所述防撞外框,所述防撞外框的內側壁與所述安裝框的外側壁之間設置有多個所述緩沖彈簧和多個所述彈簧伸縮桿,所述緩沖彈簧和所述彈簧伸縮桿呈交錯結構設置,所述緩沖彈簧固定安裝在所述安裝框與所述防撞外框之間,所述彈簧伸縮桿呈傾斜結構設置,所述彈簧伸縮桿鉸接安裝在所述安裝框與所述防撞外框之間,其特征在于,
2.如權利要求1所述的機器人用的防撞裝置,其特征在于,
3.如權利要求1所述的機器人用的防撞裝置,其特征在于,
4.如權利要求1所述的機器人用的防撞裝置,其特征在于,
5.如權利要求1所述的機器人用的防撞裝置,其特征在于,
6.如權利要求1所述的機器人用的防撞裝置,其特征在于,
7.如權利要求6所述的機器人用的防撞裝置,其特征在于,
技術總結
本技術涉及機器人防撞技術領域,具體涉及一種機器人用的防撞裝置;包括機器人本體、安裝框、多個彈簧伸縮桿、多個緩沖彈簧、防撞外框和偏離控制機構,偏離控制機構包括多個安裝座、多個壓力傳感器、多個伸縮彈簧、多個伸縮探桿和多個弧形受壓板,當機器人本體與障礙物發生碰撞時,通過弧形受壓板帶動伸縮探桿在對應的安裝座的端部滑動,伸縮探桿位于對應的安裝座的內部的一端擠壓到對應的壓力傳感器的受壓端,通過當前壓力傳感器向機器人本體的控制終端傳遞受壓信號,表明機器人本體在當前方向發生碰撞,機器人本體的控制終端控制機器人本體向遠離障礙物的方向移動,進而實現自動躲避障礙物的功能。
技術研發人員:于寧,許天恒,袁浩
受保護的技術使用者:青島理工大學(臨沂)管理委員會辦公室
技術研發日:20240507
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!