一種基于樹莓派的智能陪護機器人
本技術涉及移動機器人,尤其是涉及一種基于樹莓派的智能陪護機器人。
背景技術:
1、基于樹莓派的智能陪護機器人技術方案的發展情況目前已經取得一定進展。樹莓派是一種低成本、開源、易編程的微型計算機,可以作為智能機器人技術方案的核心處理器。基于樹莓派的智能陪護機器人通常包括語音識別、圖像識別、機器學習等技術,可以實現與用戶的語音交互、監控環境、提供娛樂等功能。目前,基于樹莓派的智能陪護機器人技術已經在一些領域得到應用,如醫療機器人、老年護理機器人等。這些機器人可以為用戶提供陪伴、監控、健康管理等服務,有助于提高用戶的生活質量。但是,現有的基于樹莓派的智能陪護機器人多采用一體化設計以及固定的攝像系統,更換和維修難度較大且難以滿足不同應用場景的需求。因此,如何進一步提高基于樹莓派的智能陪護機器人的擴展性和場景適應性、降低維修復雜性,成為本領域需要解決的問題。
技術實現思路
1、本實用新型的目的就是為了克服上述現有技術存在的缺陷而提供一種基于樹莓派的智能陪護機器人,能夠進一步提高基于樹莓派的智能陪護機器人的擴展性和場景適應性、降低維修復雜性。
2、本實用新型的目的可以通過以下技術方案來實現:
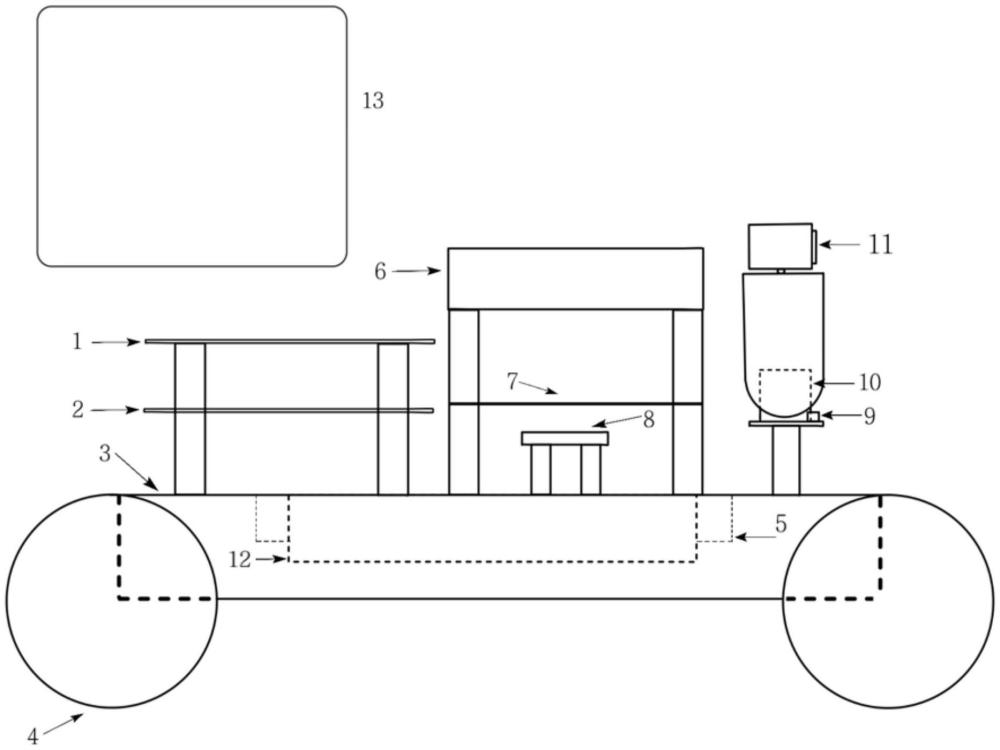
3、本實用新型提供一種基于樹莓派的智能陪護機器人,包括控制模塊、運動模塊、傳感模塊、音頻模塊、顯示模塊和電源模塊,各模塊均包括相應的標準接口,所述控制模塊包括樹莓派主控板、i/o擴展板和多個第一金屬桿,所述i/o擴展板與所述樹莓派主控板通信連接;所述運動模塊包括底盤以及與所述底盤固定連接的輪子和電機,所述電機通過標準接口與所述i/o擴展板的引腳連接,所述輪子與所述電機固定連接,所述樹莓派主控板通過第一金屬桿與所述底盤固定連接,所述i/o擴展板通過第一金屬桿與所述樹莓派主控板固定連接;所述傳感模塊和所述音頻模塊均與所述底盤固定連接,且均通過標準接口與所述i/o擴展板的引腳連接;所述顯示模塊通過標準接口與所述i/o擴展板的引腳連接;所述電源模塊包括多個獨立的電池組件且與所述底盤固定連接,所述多個獨立的電池組件通過標準接口分別與其余各模塊連接。
4、作為優選的技術方案,所述傳感模塊包括攝像頭和云臺,所述云臺固定連接于所述底盤上,所述攝像頭固定連接于所述云臺上,所述云臺通過標準接口與所述i/o擴展板的引腳連接,所述攝像頭通過標準接口與所述樹莓派主控板連接。
5、作為優選的技術方案,所述云臺為二維云臺或三維云臺。
6、作為優選的技術方案,所述傳感模塊還包括紅外避障傳感器和第二金屬桿,所述紅外避障傳感器通過第二金屬桿固定連接于所述底盤上,且通過標準接口與所述i/o擴展板的引腳連接。
7、作為優選的技術方案,所述音頻模塊包括蜂鳴器、功放板和多個第三金屬桿,所述功放器通過第三金屬桿與所述底盤固定連接,且所述功放器通過標準接口與所述i/o擴展板的引腳連接,所述蜂鳴器通過第三金屬桿與所述功放器固定連接。
8、作為優選的技術方案,所述顯示模塊包括數顯電壓表和第四金屬桿,所述數顯電壓表通過第四金屬桿固定連接于所述底盤上,且通過標準接口與所述i/o擴展板的引腳連接,所述數顯電壓表位于所述功放板下方。
9、作為優選的技術方案,所述顯示模塊還包括外接顯示屏,所述外接顯示屏通過標準接口與所述i/o擴展板的引腳連接。
10、作為優選的技術方案,通過標準接口連接的方式包括杜邦線連接、usb連接、hdmi連接、gpio連接和i2c連接。
11、作為優選的技術方案,所述電池組件包括鋰電池組件。
12、作為優選的技術方案,所述樹莓派主控板為樹莓派4b型。
13、與現有技術相比,本實用新型具有以下有益效果:
14、1、本實用新型提供的基于樹莓派的智能陪護機器人采用模塊化設計,將樹莓派主控板連接至i/o擴展板,各個模塊設計了標準接口,運動模塊、傳感模塊、音頻模塊、顯示模塊和電源模塊均可通過相應的標準接口連接至i/o擴展板,從而實現樹莓派主控板對機器人各個模塊的協同控制,更有利于各個模塊之間的通信和互換,且每個模塊都有統一的接口,方便拔插和更換、降低維修復雜性,既能簡化控制邏輯,又能增加機器人的擴展性和場景適應性;
15、2、本實用新型提供的基于樹莓派的智能陪護機器人電源模塊包括多個獨立的電池組件,且多個獨立的電池組件通過標準接口分別與其余各模塊連接,分別為不同的工作模塊供電,能夠減少各模塊之間的電力干擾,提高機器人系統的穩定性;
16、3、本實用新型提供的基于樹莓派的智能陪護機器人中,傳感模塊包括攝像頭和云臺,云臺可以采用二維云臺或三維云臺,并通過標準接口與i/o擴展板的引腳連接,二維云臺已經具有一定的角度調節能力,在此基礎上,三維云臺具有更高自由度的調節能力,更有利于靈活控制攝像頭的角度、實現全方位監測和感知,適用于更復雜的陪護環境,提供更精準的陪護服務,進一步改善用戶體驗。
技術特征:
1.一種基于樹莓派的智能陪護機器人,其特征在于,包括控制模塊、運動模塊、傳感模塊、音頻模塊、顯示模塊和電源模塊,各模塊均包括相應的標準接口,所述控制模塊包括樹莓派主控板、i/o擴展板和多個第一金屬桿,所述i/o擴展板與所述樹莓派主控板通信連接;所述運動模塊包括底盤以及與所述底盤固定連接的輪子和電機,所述電機通過標準接口與所述i/o擴展板的引腳連接,所述輪子與所述電機固定連接,所述樹莓派主控板通過第一金屬桿與所述底盤固定連接,所述i/o擴展板通過第一金屬桿與所述樹莓派主控板固定連接;所述傳感模塊和所述音頻模塊均與所述底盤固定連接,且均通過標準接口與所述i/o擴展板的引腳連接;所述顯示模塊通過標準接口與所述i/o擴展板的引腳連接;所述電源模塊包括多個獨立的電池組件且與所述底盤固定連接,所述多個獨立的電池組件通過標準接口分別與其余各模塊連接。
2.根據權利要求1所述的基于樹莓派的智能陪護機器人,其特征在于,所述傳感模塊包括攝像頭和云臺,所述云臺固定連接于所述底盤上,所述攝像頭固定連接于所述云臺上,所述云臺通過標準接口與所述i/o擴展板的引腳連接,所述攝像頭通過標準接口與所述樹莓派主控板連接。
3.根據權利要求2所述的基于樹莓派的智能陪護機器人,其特征在于,所述云臺為二維云臺或三維云臺。
4.根據權利要求2所述的基于樹莓派的智能陪護機器人,其特征在于,所述傳感模塊還包括紅外避障傳感器和第二金屬桿,所述紅外避障傳感器通過第二金屬桿固定連接于所述底盤上,且通過標準接口與所述i/o擴展板的引腳連接。
5.根據權利要求1所述的基于樹莓派的智能陪護機器人,其特征在于,所述音頻模塊包括蜂鳴器、功放板和多個第三金屬桿,所述功放板通過第三金屬桿與所述底盤固定連接,且所述功放板通過標準接口與所述i/o擴展板的引腳連接,所述蜂鳴器通過第三金屬桿與所述功放板固定連接。
6.根據權利要求5所述的基于樹莓派的智能陪護機器人,其特征在于,所述顯示模塊包括數顯電壓表和第四金屬桿,所述數顯電壓表通過第四金屬桿固定連接于所述底盤上,且通過標準接口與所述i/o擴展板的引腳連接,所述數顯電壓表位于所述功放板下方。
7.根據權利要求6所述的基于樹莓派的智能陪護機器人,其特征在于,所述顯示模塊還包括外接顯示屏,所述外接顯示屏通過標準接口與所述i/o擴展板的引腳連接。
8.根據權利要求1所述的基于樹莓派的智能陪護機器人,其特征在于,通過標準接口連接的方式包括杜邦線連接、usb連接、hdmi連接、gpio連接和i2c連接。
9.根據權利要求1所述的基于樹莓派的智能陪護機器人,其特征在于,所述電池組件包括鋰電池組件。
10.根據權利要求1所述的基于樹莓派的智能陪護機器人,其特征在于,所述樹莓派主控板為樹莓派4b型。
技術總結
本技術涉及一種基于樹莓派的智能陪護機器人。該機器人各模塊均包括相應的標準接口,控制模塊包括樹莓派主控板、I/O擴展板和第一金屬桿,I/O擴展板與樹莓派主控板通信連接;運動模塊包括底盤、輪子和電機,電機通過標準接口與I/O擴展板連接,樹莓派主控板通過第一金屬桿與底盤連接,I/O擴展板通過第一金屬桿與樹莓派主控板連接;傳感模塊和音頻模塊均與底盤固定連接且均通過標準接口與I/O擴展板連接;顯示模塊通過標準接口與I/O擴展板連接;電源模塊與底盤固定連接,包括多個獨立的電池組件且通過標準接口分別與其余各模塊連接。與現有技術相比,本技術具有提高基于樹莓派的智能陪護機器人的擴展性和場景適應性、降低維修復雜性等優點。
技術研發人員:鄧琳娜,徐冬梅
受保護的技術使用者:上海工程技術大學
技術研發日:20240617
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!