人形機器人的腕力傳感器標定方法、裝置、設備及介質與流程
本發明涉及機器人和信息,尤其涉及人形機器人的腕力傳感器標定方法、裝置、設備及介質。
背景技術:
1、隨著機器人技術和自動化系統的不斷進步,人形機器人在工業制造、醫療護理、家庭服務等多個領域得到了廣泛應用。在復雜多變的工作環境中執行精細操作任務時,對人形機器人的腕力傳感器的精度和可靠性提出了更高的要求。
2、然而,傳統的離線標定方法通常是在特定條件下進行的一次性校準過程,雖然能夠在初期提供較為準確的測量值,但無法應對實時變化,因此,傳統的離線標定方法缺乏校準機制,難以獲取到腕力傳感器的真實外力和真實外力矩。因此,在機器人運行過程中,如何獲取腕力傳感器的真實外力和真實外力矩,是一個亟需解決的問題。
技術實現思路
1、本發明提供一種人形機器人的腕力傳感器標定方法、裝置、計算機設備及存儲介質,以解決如何獲取腕力傳感器的真實外力和真實外力矩的技術問題。
2、第一方面,提供了一種人形機器人的腕力傳感器標定方法,包括:
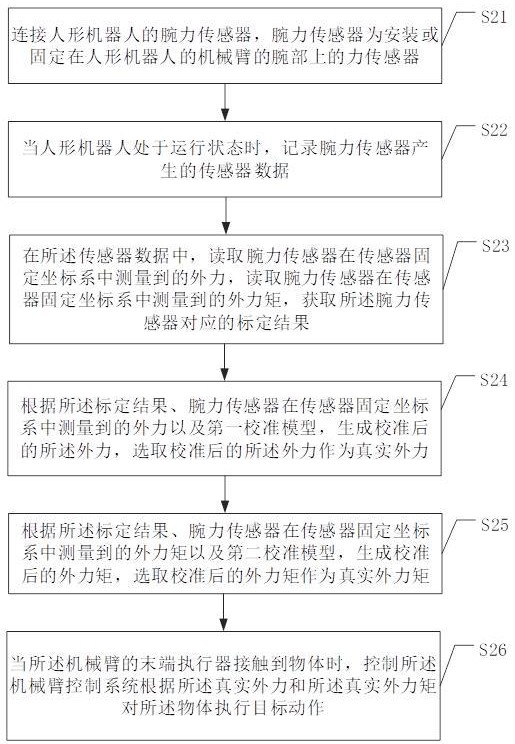
3、連接人形機器人的腕力傳感器,腕力傳感器為安裝或固定在人形機器人的機械臂的腕部上的力傳感器;
4、當人形機器人處于運行狀態時,記錄腕力傳感器產生的傳感器數據;
5、在所述傳感器數據中,讀取腕力傳感器在傳感器固定坐標系中測量到的外力,讀取腕力傳感器在傳感器固定坐標系中測量到的外力矩,獲取所述腕力傳感器對應的標定結果;
6、根據所述標定結果、腕力傳感器在傳感器固定坐標系中測量到的外力以及第一校準模型,生成校準后的所述外力,選取校準后的所述外力作為真實外力;
7、根據所述標定結果、腕力傳感器在傳感器固定坐標系中測量到的外力矩以及第二校準模型,生成校準后的外力矩,選取校準后的外力矩作為真實外力矩;
8、當所述機械臂的末端執行器接觸到物體時,控制所述機械臂控制系統根據所述真實外力和所述真實外力矩對所述物體執行目標動作。
9、進一步地,所述當人形機器人處于運行狀態時,記錄腕力傳感器產生的傳感器數據,包括:
10、當人形機器人處于運行狀態時,獲取采樣時間間隔;
11、根據所述采樣時間間隔,讀取腕力傳感器產生的傳感器數據,記錄傳感器數據。
12、進一步地,所述在所述傳感器數據中,讀取腕力傳感器在傳感器固定坐標系中測量到的外力,讀取腕力傳感器在傳感器固定坐標系中測量到的外力矩,獲取所述腕力傳感器對應的標定結果,包括:
13、獲取第一讀取指令和第二讀取指令;
14、在所述傳感器數據中,采用所述第一讀取指令,讀取腕力傳感器在傳感器固定坐標系中測量到的外力,采用所述第二讀取指令,讀取腕力傳感器在傳感器固定坐標系中測量到的外力矩,獲取所述腕力傳感器對應的標定結果。
15、進一步地,所述根據所述標定結果、腕力傳感器在傳感器固定坐標系中測量到的外力以及第一校準模型,生成校準后的所述外力,選取校準后的所述外力作為真實外力,包括:
16、在所述標定結果中,獲取從機械臂末端坐標系到機器人基座坐標系的旋轉矩陣、從傳感器固定坐標系到機械臂末端坐標系的旋轉矩陣、腕力傳感器在傳感器固定坐標系中測量到的外力、腕力傳感器在傳感器固定坐標系中測量到的力偏移量、末端執行器在機器人基座坐標系下的重力向量,選取從傳感器固定坐標系到機械臂末端坐標系的旋轉矩陣作為腕力傳感器的安裝矩陣;
17、根據從機械臂末端坐標系到機器人基座坐標系的旋轉矩陣、腕力傳感器的安裝矩陣、腕力傳感器在傳感器固定坐標系中測量到的外力、腕力傳感器在傳感器固定坐標系中測量到的外力、腕力傳感器在傳感器固定坐標系中測量到的力偏移量、末端執行器在機器人基座坐標系下的重力向量以及第一校準模型,生成校準后的所述外力,選取校準后的所述外力作為真實外力。
18、進一步地,所述根據所述標定結果、腕力傳感器在傳感器固定坐標系中測量到的外力矩以及第二校準模型,生成校準后的外力矩,選取校準后的外力矩作為真實外力矩,包括:
19、在所述標定結果中,獲取從機械臂末端坐標系到機器人基座坐標系的旋轉矩陣、腕力傳感器的安裝矩陣、腕力傳感器在傳感器固定坐標系下的重心位置、腕力傳感器在傳感器固定坐標系中測量到的力偏移量;
20、根據從機械臂末端坐標系到機器人基座坐標系的旋轉矩陣、腕力傳感器的安裝矩陣、腕力傳感器在傳感器固定坐標系中測量到的外力矩、腕力傳感器在傳感器固定坐標系下的重心位置、腕力傳感器在傳感器固定坐標系中測量到的力偏移量以及第二校準模型,生成校準后的外力矩,選取校準后的外力矩作為真實外力矩。
21、進一步地,所述當所述機械臂的末端執行器接觸到物體時,控制所述機械臂控制系統根據所述真實外力和所述真實外力矩對所述物體執行目標動作,包括:
22、當所述機械臂的末端執行器接觸到物體時,訪問人形機器人的機械臂控制系統,所述機械臂控制系統為機械臂的控制系統;
23、向所述機械臂控制系統傳輸所述真實外力和所述真實外力矩,控制所述機械臂控制系統根據所述真實外力和所述真實外力矩對所述物體執行目標動作。
24、進一步地,
25、所述傳感器固定坐標系為腕力傳感器的固定坐標系,所述機械臂末端坐標系為所述機械臂的末端坐標系,所述機器人基座坐標系為所述人形機器人的基座坐標系。
26、第二方面,提供了一種人形機器人的腕力傳感器標定裝置,包括:
27、連接模塊,用于連接人形機器人的腕力傳感器,腕力傳感器為安裝或固定在人形機器人的機械臂的腕部上的力傳感器;
28、記錄模塊,用于當人形機器人處于運行狀態時,記錄腕力傳感器產生的傳感器數據;
29、讀取模塊,用于在所述傳感器數據中,讀取腕力傳感器在傳感器固定坐標系中測量到的外力,讀取腕力傳感器在傳感器固定坐標系中測量到的外力矩,獲取所述腕力傳感器對應的標定結果;
30、第一生成模塊,用于根據所述標定結果、腕力傳感器在傳感器固定坐標系中測量到的外力以及第一校準模型,生成校準后的所述外力,選取校準后的所述外力作為真實外力;
31、第二生成模塊,用于根據所述標定結果、腕力傳感器在傳感器固定坐標系中測量到的外力矩以及第二校準模型,生成校準后的外力矩,選取校準后的外力矩作為真實外力矩;
32、控制模塊,用于當所述機械臂的末端執行器接觸到物體時,控制所述機械臂控制系統根據所述真實外力和所述真實外力矩對所述物體執行目標動作。
33、第三方面,提供了一種計算機設備,包括存儲器、處理器以及存儲在存儲器中并可在處理器上運行的計算機程序,處理器執行計算機程序時實現上述腕力傳感器標定方法的步驟。
34、第四方面,提供了一種計算機可讀存儲介質,計算機可讀存儲介質存儲有計算機程序,計算機程序被處理器執行時實現上述腕力傳感器標定方法的步驟。
35、本技術提供一種人形機器人的腕力傳感器標定方法、裝置、計算機設備及存儲介質,連接人形機器人的腕力傳感器,腕力傳感器為安裝或固定在人形機器人的機械臂的腕部上的力傳感器;當人形機器人處于運行狀態時,記錄腕力傳感器產生的傳感器數據;在所述傳感器數據中,讀取腕力傳感器在傳感器固定坐標系中測量到的外力,讀取腕力傳感器在傳感器固定坐標系中測量到的外力矩,獲取所述腕力傳感器對應的標定結果;根據所述標定結果、腕力傳感器在傳感器固定坐標系中測量到的外力以及第一校準模型,生成校準后的所述外力,選取校準后的所述外力作為真實外力;根據所述標定結果、腕力傳感器在傳感器固定坐標系中測量到的外力矩以及第二校準模型,生成校準后的外力矩,選取校準后的外力矩作為真實外力矩;當所述機械臂的末端執行器接觸到物體時,控制所述機械臂控制系統根據所述真實外力和所述真實外力矩對所述物體執行目標動作,有益效果在于兩方面,一方面,根據所述標定結果、腕力傳感器在傳感器固定坐標系中測量到的外力以及第一校準模型,生成校準后的所述外力,選取校準后的所述外力作為真實外力,根據所述標定結果、腕力傳感器在傳感器固定坐標系中測量到的外力矩以及第二校準模型,生成校準后的外力矩,選取校準后的外力矩作為真實外力矩,因此解決了如何獲取腕力傳感器的真實外力和真實外力矩的問題;另一方面,當所述機械臂接觸到所述物體時,控制所述機械臂控制系統根據所述真實外力和所述真實外力矩對所述物體執行目標動作,因此有利于提升機械臂控制系統在執行任務時的準確性。
- 還沒有人留言評論。精彩留言會獲得點贊!