機器人的安全導航與操作方法、裝置和電子設備
本發明涉及人工智能,尤其涉及一種機器人的安全導航與操作方法、裝置和電子設備。
背景技術:
1、近年來,隨著智能機器人的快速發展,機器人在多個領域中得到了廣泛應用,尤其是在室內環境中,機器人自主導航成為研究的熱點。現有的機器人導航技術主要包括視覺導航、激光雷達導航、慣性導航等,其中視覺導航因其低成本、強大的環境感知能力而被廣泛采用。傳統的視覺導航系統通常依賴圖像傳感器采集環境信息,并通過特征提取和路徑規劃算法來實現導航。然而,這種方式在復雜環境下容易受到光照變化、遮擋物等因素的影響,導致導航精度降低。
2、為解決上述問題,語言導航技術被引入到機器人領域,利用語言命令對機器人的控制進行優化。然而,單一的語言導航存在定位精度差、環境交互性差等問題,尤其是在復雜的室內環境中,由于缺少周圍環境信息而導致機器人對語言指令的理解是模糊和不精確的。在機器人執行指令的過程中,容易出現損壞周圍物體的危險行為。如此,如何控制機器人進行安全導航與操作,是本領域所要解決的一個技術問題。
技術實現思路
1、本發明提供了一種機器人的安全導航與操作方法、裝置和電子設備,能夠解決以上至少一個技術問題。
2、根據本發明的一方面,提供了一種機器人的安全導航與操作方法,包括:
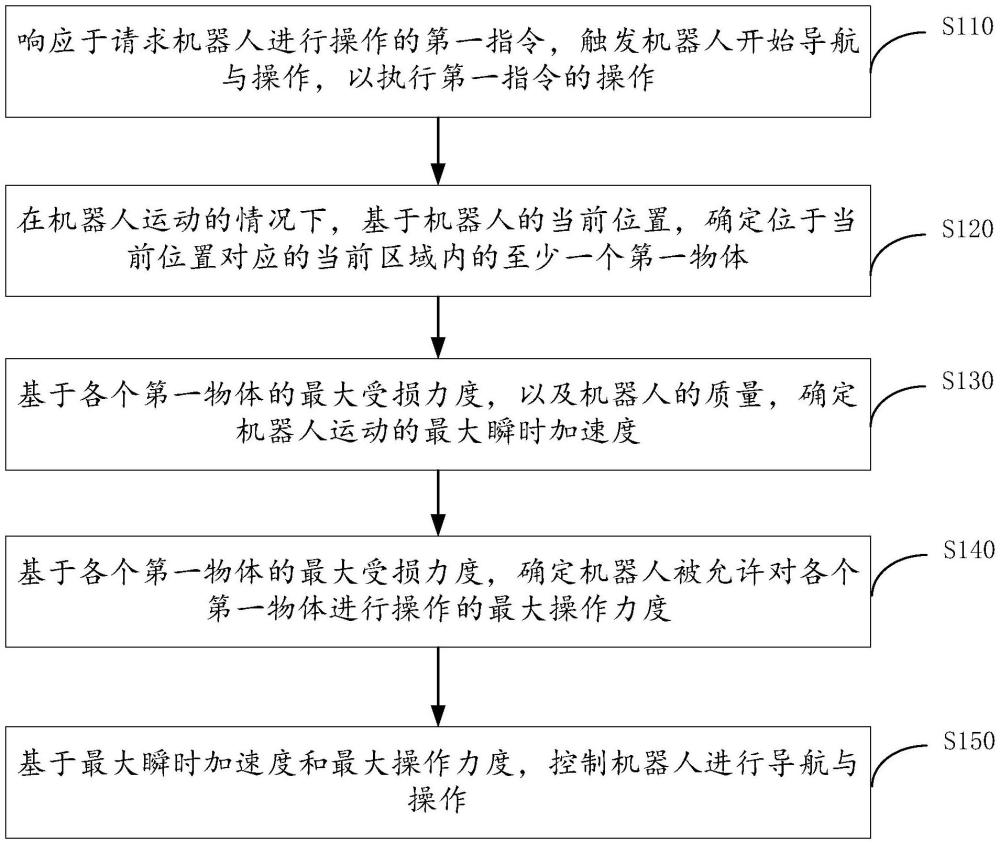
3、響應于請求機器人進行操作的第一指令,觸發所述機器人開始導航與操作,以執行所述第一指令的操作;
4、在所述機器人運動的情況下,基于所述機器人的當前位置,確定位于所述當前位置對應的當前區域內的至少一個第一物體;
5、基于各個所述第一物體的最大受損力度,以及所述機器人的質量,確定所述機器人運動的最大瞬時加速度;
6、基于各個所述第一物體的最大受損力度,確定所述機器人被允許對各個所述第一物體進行操作的最大操作力度;
7、基于所述最大瞬時加速度和所述最大操作力度,控制所述機器人進行導航與操作。
8、根據本發明的另一方面,提供了一種機器人的安全導航與操作裝置,包括:
9、觸發模塊,用于響應于請求機器人進行操作的第一指令,觸發所述機器人開始導航與操作,以執行所述第一指令的操作;
10、第一物體確定模塊,用于在所述機器人運動的情況下,基于所述機器人的當前位置,確定位于所述當前位置對應的當前區域內的至少一個第一物體;
11、加速度確定模塊,用于基于各個所述第一物體的最大受損力度,以及所述機器人的質量,確定所述機器人運動的最大瞬時加速度;
12、操作力度確定模塊,用于基于各個所述第一物體的最大受損力度,確定所述機器人被允許對各個所述第一物體進行操作的最大操作力度;
13、導航與操作模塊,用于基于所述最大瞬時加速度和所述最大操作力度,控制所述機器人進行導航與操作。
14、采用本發明技術方案,響應于請求機器人進行操作的第一指令,觸發機器人開始導航與操作,以執行第一指令的操作;在機器人運動的情況下,基于機器人的當前位置,確定位于當前位置對應的當前區域內的至少一個第一物體;基于各個第一物體的最大受損力度,以及機器人的質量,確定機器人運動的最大瞬時加速度;基于各個第一物體的最大受損力度,確定機器人被允許對各個第一物體進行操作的最大操作力度;基于最大瞬時加速度和最大操作力度,控制機器人進行導航與操作。如此,可以盡可能地在機器人執行指令時避免機器人損壞周圍的物體,提高機器人導航與操作的安全性能。
15、應當理解,本部分所描述的內容并非旨在標識本發明的實施例的關鍵或重要特征,也不用于限制本發明的范圍。本發明的其它特征將通過以下的說明書而變得容易理解。
技術特征:
1.一種機器人的安全導航與操作方法,其特征在于,包括:
2.根據權利要求1所述的方法,其特征在于,所述觸發所述機器人開始導航與操作,包括:
3.根據權利要求2所述的方法,其特征在于,所述基于所述第二物體的屬性信息、所述第三物體的屬性信息以及所述第二物體與所述第三物體之間的安全交互信息,確定所述第一指令的執行風險,包括:
4.根據權利要求3所述的方法,其特征在于,所述屬性信息包括物體硬件屬性和物體易損屬性;
5.根據權利要求4所述的方法,其特征在于,還包括:
6.根據權利要求4所述的方法,其特征在于,還包括:
7.根據權利要求6所述的方法,其特征在于,還包括:
8.根據權利要求1-7中任一項所述的方法,其特征在于,所述基于各個所述第一物體的最大受損力度,以及所述機器人的質量,確定所述機器人運動的最大瞬時加速度,包括:
9.一種機器人的安全導航與操作裝置,其特征在于,包括:
10.一種電子設備,包括:
11.一種存儲有計算機指令的非瞬時計算機可讀存儲介質,其中,所述計算機指令用于使所述計算機執行根據權利要求1-7中任一項所述的方法。
技術總結
本發明提供了一種機器人的安全導航與操作方法和系統,涉及人工智能技術領域。實現方案為:響應于請求機器人進行操作的第一指令,觸發機器人開始導航與操作,以執行第一指令的操作;在機器人運動的情況下,基于機器人的當前位置,確定位于當前位置對應的當前區域內的至少一個第一物體;基于各個第一物體的最大受損力度,以及機器人的質量,確定機器人運動的最大瞬時加速度;基于各個第一物體的最大受損力度,確定機器人被允許對各個第一物體進行操作的最大操作力度;基于最大瞬時加速度和最大操作力度,控制機器人進行導航與操作。
技術研發人員:李昊昂,王賀升
受保護的技術使用者:香港科技大學(廣州)
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!