一種多模態(tài)可移動健康輔助機(jī)械臂系統(tǒng)及其協(xié)同控制方法與流程
本發(fā)明屬于智能服務(wù)機(jī)器人領(lǐng)域,具體涉及一種集成輪式移動底盤、可展開三角支撐結(jié)構(gòu)與多機(jī)協(xié)作能力的健康輔助機(jī)械臂系統(tǒng),適用于家庭、養(yǎng)老院及醫(yī)院等場景,為行動受限人群提供安全、穩(wěn)定的物理輔助與生活照料服務(wù)。
背景技術(shù):
1、現(xiàn)有護(hù)理機(jī)器人存在以下問題:第一是固定位置如床邊進(jìn)行工作的健康輔助機(jī)械臂(例如專利)存在著工作范圍受限、非工作時占用生活空間的問題;第二是移動性與穩(wěn)定性矛盾:傳統(tǒng)輪式機(jī)器人移動靈活但作業(yè)時易晃動,固定式機(jī)械臂缺乏場景適應(yīng)性;第三是協(xié)作能力不足:多機(jī)協(xié)同算法復(fù)雜度高,難以實(shí)現(xiàn)精準(zhǔn)動作同步;第四是能源管理缺陷:連續(xù)工作時續(xù)航不足,缺乏自動充電集成設(shè)計。
2、現(xiàn)有技術(shù)參考:廣州零號軟件科技有限公司的輔助機(jī)械臂系統(tǒng)(專利cn2025102717587“一種多自由度可適配健康輔助機(jī)械臂系統(tǒng)及其控制方法”和專利202510271664x“:一種應(yīng)用在床邊可拆卸多模態(tài)ai健康輔助機(jī)械臂系統(tǒng)”)需要固定安裝在床邊等位置,無法執(zhí)行移動操作,工作范圍受到限制。江蘇諾嘉機(jī)械的支撐腿輔助起重裝置(專利cn118619097b“一種具有支撐腿輔助的起重裝置”)通過自適應(yīng)支撐腿增強(qiáng)穩(wěn)定性,但其結(jié)構(gòu)復(fù)雜且未適配移動場景;中聯(lián)重科臂架總成輔助系統(tǒng)(cn115432587a“”)提出多吊裝單元協(xié)同調(diào)平方案,但未涉及人體交互與動態(tài)路徑規(guī)劃。
技術(shù)實(shí)現(xiàn)思路
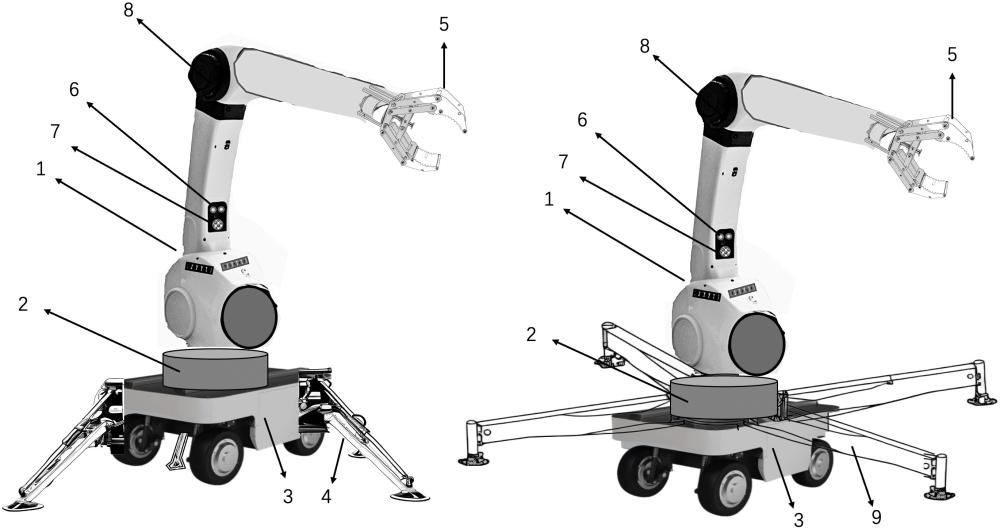
1、機(jī)械臂-移動底盤集成設(shè)計:輪式移動載體:四輪全向驅(qū)動底盤,內(nèi)置激光雷達(dá)與視覺slam模塊,支持動態(tài)避障與路徑規(guī)劃;支撐結(jié)構(gòu)可選兩種形態(tài):?a)?三角支撐(圖1中左圖):包含三個獨(dú)立液壓支腿,展開時呈120°均勻分布;?b)?四角支撐(圖1中右圖):包含四個可伸縮/折疊的機(jī)械支腿,展開時呈矩形對稱布局;?模塊化機(jī)械臂(3-6自由度),末端執(zhí)行器包含兩指夾爪、三指自適應(yīng)手及五指仿生手;?多機(jī)協(xié)作控制模塊,支持負(fù)載動態(tài)分配與亞秒級動作同步。;能源管理:底盤內(nèi)置高密度電池(續(xù)航≥8小時),支持自動返回充電座(磁吸對接精度±1mm)。
2、機(jī)械臂系統(tǒng):模塊化機(jī)械臂:兼容3-6自由度配置,末端可替換為兩指夾爪、三指自適應(yīng)手或五指仿生手(抓握力1-20n可調(diào));傳感器融合:雙目攝像頭(用戶姿態(tài)識別)、毫米波雷達(dá)(防碰撞)、六軸力傳感器(接觸力閉環(huán)控制)。
3、多機(jī)協(xié)作控制(圖2):分布式計算框架:基于ros?2的分布式節(jié)點(diǎn)通信,支持雙機(jī)協(xié)同完成托舉、穿衣等高復(fù)雜度任務(wù);動態(tài)負(fù)載均衡:根據(jù)機(jī)械臂位置與負(fù)載狀態(tài)自動分配動作優(yōu)先級(如主臂承擔(dān)70%負(fù)載,輔臂調(diào)整平衡)。
4、本發(fā)明的支撐結(jié)構(gòu)形態(tài)擴(kuò)展(圖3):伸縮式支腿設(shè)計:采用多級套筒結(jié)構(gòu),內(nèi)置高精度直線導(dǎo)軌;驅(qū)動方式可選液壓(高負(fù)載場景)或電動推桿(低成本版本),伸展速度0.1-0.5m/s;折疊式支腿設(shè)計:支腿主體為碳纖維連桿,折疊關(guān)節(jié)采用蝸輪蝸桿自鎖機(jī)構(gòu);展開時通過彈簧蓄能器快速釋放,同步觸發(fā)機(jī)械臂姿態(tài)預(yù)調(diào)整。
5、本發(fā)明的創(chuàng)新點(diǎn)體現(xiàn)在仿起重機(jī)支撐結(jié)構(gòu)、多機(jī)動態(tài)協(xié)作、低成本模塊化等三點(diǎn)。例如三角支撐模式是仿起重機(jī)支撐結(jié)構(gòu):三角支架展開時力學(xué)分布優(yōu)化(參考cn118619097b“一種具有支撐腿輔助的起重裝置”中的支撐腿設(shè)計),穩(wěn)定性較傳統(tǒng)輪式底盤大幅提升;
6、多機(jī)動態(tài)協(xié)作:基于中聯(lián)重科協(xié)同調(diào)平技術(shù)(cn115432587a“臂架總成輔助上機(jī)系統(tǒng)”)參考與改進(jìn),實(shí)現(xiàn)亞秒級動作同步與負(fù)載自適應(yīng)分配;
7、低成本模塊化:機(jī)械臂關(guān)節(jié)采用宇樹科技u系列電機(jī),兼容3-6自由度配置,可使單關(guān)節(jié)替換成本大幅降低。
技術(shù)特征:
1.一種多模態(tài)可移動健康輔助機(jī)械臂系統(tǒng),其特征在于包括:四輪全向驅(qū)動底盤,集成可展開式支撐結(jié)構(gòu),所述支撐結(jié)構(gòu)包含:a)伸縮式支腿:通過液壓/電動推桿驅(qū)動,作業(yè)時從底盤內(nèi)部伸出;b)折疊式支腿:通過旋轉(zhuǎn)關(guān)節(jié)收納于底盤或機(jī)械臂外側(cè),展開時旋轉(zhuǎn)至預(yù)設(shè)角度;所述支撐結(jié)構(gòu)支持兩種布局形態(tài):i)?三角支撐:三個支腿呈120°對稱分布;ii)?四角支撐:四個支腿呈矩形對稱分布;模塊化機(jī)械臂(3-6自由度),末端執(zhí)行器可替換為夾爪或多指仿生手;集成支撐結(jié)構(gòu)與slam導(dǎo)航模塊;多機(jī)協(xié)作控制模塊,支持負(fù)載動態(tài)分配與亞秒級動作同步。
2.根據(jù)權(quán)利要求1所述系統(tǒng),其特征在于:伸縮式支腿的最大伸展長度為底盤直徑的1.2-1.5倍,收縮后完全隱藏于底盤腔體內(nèi);折疊式支腿收納時與機(jī)械臂外殼平齊,展開角度為60°-180°,折疊關(guān)節(jié)處設(shè)有自鎖卡扣。
3.根據(jù)權(quán)利要求1所述系統(tǒng),其特征在于:可移動健康輔助機(jī)械臂系統(tǒng)可搭載選擇搭載一種支撐腿形式+一種支撐方式,也可以選擇復(fù)合式的支撐腿+支撐方式,當(dāng)選擇復(fù)合式的支撐腿+支撐方式時,所述支撐結(jié)構(gòu)的展開形態(tài)與場景自適應(yīng)匹配:狹窄空間自動選擇三角支撐+折疊式支腿(展開時間≤2秒);高負(fù)載場景自動切換四角支撐+伸縮式支腿(支撐力≥500kg)。
4.根據(jù)權(quán)利要求1所述系統(tǒng),其特征在于:所述折疊式支腿的收納位置包含:底盤外側(cè)凹槽(支腿折疊后與輪轂齊平);機(jī)械臂基座兩側(cè)(支腿折疊后貼合機(jī)械臂外殼)。
5.根據(jù)權(quán)利要求1所述系統(tǒng),其特征在于:所述底盤內(nèi)置自動充電對接模塊,充電座定位精度±1mm,充電效率≥95%。
6.根據(jù)權(quán)利要求1所述系統(tǒng),其特征在于:所述多機(jī)協(xié)作控制模塊采用優(yōu)先級動態(tài)分配算法,主臂負(fù)載占比50-80%,輔臂承擔(dān)平衡調(diào)節(jié)。
技術(shù)總結(jié)
本發(fā)明公開了一種多模態(tài)可移動健康輔助機(jī)械臂系統(tǒng),通過仿起重機(jī)三角支撐結(jié)構(gòu)及四角支撐結(jié)構(gòu)、模塊化機(jī)械臂與多機(jī)協(xié)同控制技術(shù),解決了傳統(tǒng)護(hù)理機(jī)器人移動性與穩(wěn)定性不可兼得的難題。系統(tǒng)支持單機(jī)操作與多機(jī)協(xié)作,適用于攙扶、遞物、緊急救援等場景,續(xù)航時間長,采用模塊化設(shè)計盡量采用通用模塊量產(chǎn)成本大幅降低,具備極高的醫(yī)療與家庭應(yīng)用價值。
技術(shù)研發(fā)人員:向忠宏
受保護(hù)的技術(shù)使用者:廣州零號軟件科技有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點(diǎn)贊!