基于改進粒子群算法的機器人軌跡規劃方法及系統
本發明涉及機器人軌跡規劃領域,具體涉及一種基于改進粒子群算法的光伏板安裝機器人軌跡規劃方法。
背景技術:
1、隨著光伏發電高質量快速發展,光伏發電在我國新型能源體系構建中將發揮重要作用。傳統的工業機器人在執行復雜任務,如光伏板安裝時,面臨著軌跡規劃效率低和運行不穩定的問題。軌跡規劃是機器人技術中的一個關鍵環節,它直接影響到機器人的運行效率和任務的準確性。粒子群優化算法(pso)是一種基于群體智能的優化工具,適用于解決復雜優化問題。在機器人軌跡規劃中,pso被用來尋找最優或近似最優的解決方案,傳統的pso算法在處理一些復雜問題時可能會遇到局部最優解和收斂速度慢的問題。現有傳統智能算法存在全局與局部搜索能力不足的問題,pso算法可能會在搜索過程中過早收斂到局部最優解,而不是全局最優解。在復雜的機器人軌跡規劃問題中,局部最優解可能會導致機器人執行次優路徑。
技術實現思路
1、發明目的:為提高大型光伏發電站機械臂安裝光伏板的效率,提出一種基于改進粒子群算法的光伏板安裝機器人軌跡規劃方法。
2、技術方案:基于改進粒子群算法的機器人軌跡規劃方法,包括以下步驟:
3、步驟1:獲取機器人關節的運動數據,將機器人關節的運動軌跡劃分為三段,分別采用三次多項式、五次多項式和三次多項式進行插值,形成分段混合多項式插值函數;
4、步驟2:考慮約束條件,選擇機器人各關節運動所需的最大時間,保證每個關節在同一段運行軌跡內都能完成相應的運動;選擇每個關節在同一時間段內消耗時間最長的運動軌跡,將該最長時間段作為整體運動軌跡的時間長度;
5、步驟3:使用改進粒子群算法獨立地求解機器人每個關節的最佳運行路徑;所述改進粒子群算法利用學習因子的動態調整策略進行優化;
6、步驟4:將求得的三段軌跡運行時消耗的最大時間值代入所述分段混合多項式插值函數中進行整體軌跡規劃。
7、進一步的,所述機器人關節的運動數據包括起始位置、目標位置以及路徑上的關鍵插值點,并通過逆運動學方程轉換為對應的關節角度值。
8、進一步的,步驟2中所述約束條件包括機器人關節的運動速度和加速度。
9、進一步的,所述改進粒子群算法利用學習因子的動態調整策略進行優化具體為:對傳統粒子群算法的粒子速度和位置更新函數中的學習因子進行優化,優化后的學習因子c1、c2的表達式為:
10、c1=2cos2(nπ/2n)
11、c2=2-c1
12、其中,n是迭代總次數,n是當前迭代次數。
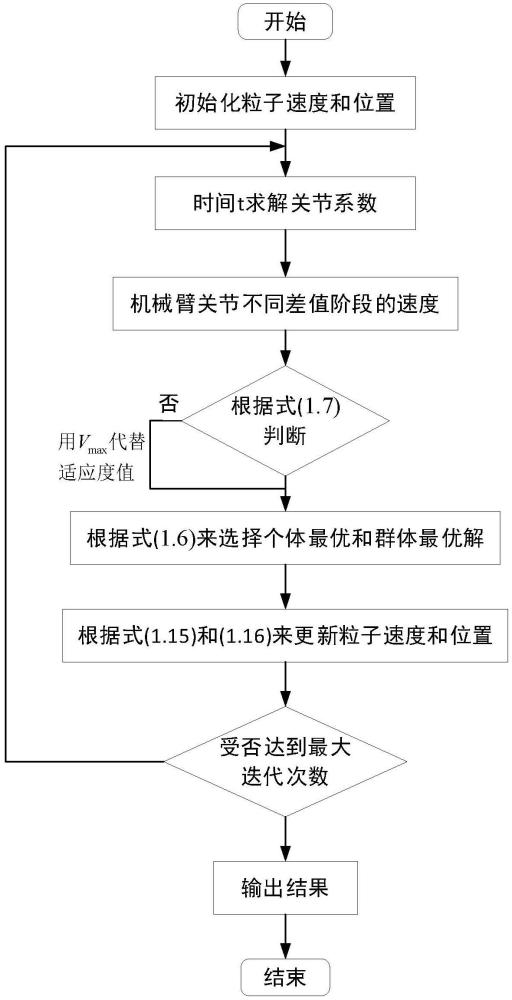
13、進一步的,步驟3包括:
14、(3.1)粒子群參數初始化,初始化每個粒子的路徑參數;如時間值或控制點坐標等。
15、(3.2)將三段運動軌跡函數改寫成矩陣相乘的形式,再將機械臂各關節三段軌跡運行所需的時間t1,t2,t3代入,求解出多項式中的系數aij;
16、(3.3)將求得的關節角速度與關節角加速度分別與關節最大角速度和最大角加速度相比較,若求得的關節角速度與關節角加速度不超過關節最大角速度和最大角加速度,便進行下一個步驟,否則重新隨機初始化粒子的位置和速度;
17、(3.4)將所得粒子的適應度函數進行迭代,找尋最優值;
18、(3.5)檢查是否滿足停止條件,如滿足則停止算法;否則,繼續執行;
19、(3.6)停止后,選擇各關節運行時消耗的最大時間作為機械關節的運行時間。
20、進一步的,改進粒子群算法的參數初始化包括:定義粒子位置與速度的維度對應于分段混合多項式插值函數中各段的時間參數,設置粒子群規模、最大迭代次數以及初始的慣性權重、學習因子;每個粒子代表一個可能的機器人關節的運動軌跡。
21、進一步的,步驟(3.4)在迭代過程中,將粒子i當前自身位置pbesti和歷史最優位置相比較,取最優者作為歷史最優位置;種群中最優位置和歷史最優位置相比較,選擇最優者作為種群歷史最優位置。
22、進一步的,所述步驟(3.5)中停止條件包括達到最大迭代次數或適應度達到閾值。
23、基于改進粒子群算法的機器人軌跡規劃系統,包括:
24、數據處理模塊獲取機器人關節的運動數據,將機器人關節的運動軌跡劃分為三段,分別采用三次多項式、五次多項式和三次多項式進行插值,形成分段混合多項式插值函數;
25、決策模塊考慮約束條件,選擇機器人各關節運動所需的最大時間,保證每個關節在同一段運行軌跡內都能完成相應的運動;選擇每個關節在同一時間段內消耗時間最長的運動軌跡,將該最長時間段作為整體運動軌跡的時間長度;
26、改進粒子群算法模塊使用改進粒子群算法獨立地求解機器人每個關節的最佳運行路徑;所述改進粒子群算法利用學習因子的動態調整策略進行優化;
27、規劃模塊將求得的三段軌跡運行時消耗的最大時間值代入所述分段混合多項式插值函數中進行整體軌跡規劃。
28、有益效果:本發明在軌跡規劃的基礎上研究安裝機械臂效率最優軌跡規劃問題,以效率最高作為優化目標,提出通過使用自適應學習因子來提高粒子群算法的效率和全局搜索能力的方法。
技術特征:
1.基于改進粒子群算法的機器人軌跡規劃方法,其特征在于,包括以下步驟:
2.根據權利要求1所述的基于改進粒子群算法的機器人軌跡規劃方法,其特征在于,所述機器人關節的運動數據包括起始位置、目標位置以及路徑上的關鍵插值點,并通過逆運動學方程轉換為對應的關節角度值。
3.根據權利要求1所述的基于改進粒子群算法的機器人軌跡規劃方法,其特征在于,步驟2中所述約束條件包括機器人關節的運動速度和加速度。
4.根據權利要求1所述的基于改進粒子群算法的機器人軌跡規劃方法,其特征在于,所述改進粒子群算法利用學習因子的動態調整策略進行優化具體為:對傳統粒子群算法的粒子速度和位置更新函數中的學習因子進行優化,優化后的學習因子c1、c2的表達式為:
5.根據權利要求1所述的基于改進粒子群算法的機器人軌跡規劃方法,其特征在于,步驟3包括:
6.根據權利要求5所述的基于改進粒子群算法的機器人軌跡規劃方法,其特征在于,改進粒子群算法的參數初始化包括:定義粒子位置與速度的維度對應于分段混合多項式插值函數中各段的時間參數,設置粒子群規模、最大迭代次數以及初始的慣性權重、學習因子;每個粒子代表一個可能的機器人關節的運動軌跡。
7.根據權利要求5所述的基于改進粒子群算法的機器人軌跡規劃方法,其特征在于,步驟(3.4)在迭代過程中,將粒子i當前自身位置pbesti和歷史最優位置相比較,取最優者作為歷史最優位置;種群中最優位置和歷史最優位置相比較,選擇最優者作為種群歷史最優位置。
8.根據權利要求5所述的基于改進粒子群算法的機器人軌跡規劃方法,其特征在于,所述步驟(3.5)中停止條件包括達到最大迭代次數或適應度達到閾值。
9.利用權利要求1所述基于改進粒子群算法的機器人軌跡規劃方法的基于改進粒子群算法的機器人軌跡規劃系統,其特征在于,包括:
10.根據權利要求9所述的基于改進粒子群算法的機器人軌跡規劃系統,其特征在于,所述改進粒子群算法利用學習因子的動態調整策略進行優化具體為:對傳統粒子群算法的粒子速度和位置更新函數中的學習因子進行優化,優化后的學習因子c1、c2的表達式為:
技術總結
本發明公開了基于改進粒子群算法的機器人軌跡規劃方法,步驟1:獲取機器人關節的運動數據;步驟2:考慮約束條件,選擇機器人各關節運動所需的最大時間,保證每個關節在同一段運行軌跡內都能完成相應的運動;選擇每個關節在同一時間段內消耗時間最長的運動軌跡,將該最長時間段作為整體運動軌跡的時間長度;步驟3:使用改進粒子群算法獨立地求解機器人每個關節的最佳運行路徑;所述改進粒子群算法利用學習因子的動態調整策略進行優化;步驟4:將求得的三段軌跡運行時消耗的最大時間值代入所述分段混合多項式插值函數中進行整體軌跡規劃。本申請提出通過使用自適應學習因子來提高粒子群算法的效率和全局搜索能力。
技術研發人員:王佳,祖啟來,盧道華
受保護的技術使用者:江蘇科技大學
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!