機器人的制作方法
本發明涉及機器人,特別涉及一種機器人。
背景技術:
1、在相關技術中,機器人代替機床進行零件加工可大幅增加加工范圍和靈活性,實現航空航天等大型零件的在位加工,還可大幅降低加工成本。然而機器人剛度相比機床通常較低,剛度不足導致機器人加工過程振動較大、穩定性差,從而影響零件加工質量和加工效率。
技術實現思路
1、本發明實施方式提供了一種機器人以解決上述存在的至少一個技術問題。
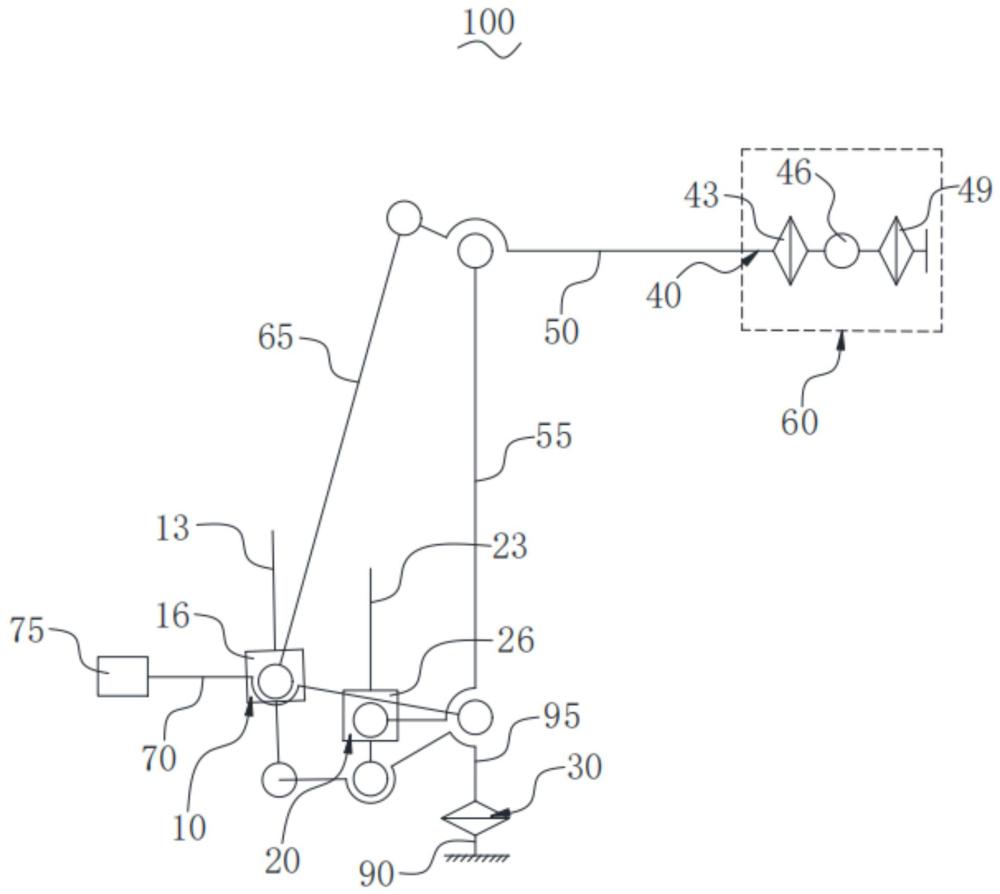
2、本發明實施方式的一種機器人,機器人包括:
3、底座;
4、第一臂;
5、第二臂,與所述第一臂和所述底座可轉動連接;
6、第一驅動機構,所述第一驅動機構與所述第一臂連接,所述第一驅動機構包括第一絲桿和第一滑塊,所述第一滑塊與所述第一絲桿連接,所述第一臂與所述第一滑塊和所述第一絲桿的其中一者連接,通過驅動所述第一滑塊相對于所述第一絲桿運動以驅動所述第一臂相對于所述第二臂轉動;
7、第二驅動機構,所述第二驅動機構與所述第二臂連接,所述第二驅動機構包括第二絲桿和第二滑塊,所述第二滑塊與所述第二絲桿連接,所述第二臂與所述第二滑塊和所述第二絲桿的其中一者連接,通過驅動所述第二滑塊相對于所述第二絲桿運動以驅動所述第二臂相對于所述底座轉動。
8、上述機器人中,通過絲桿與滑塊的連接以及相對運動,以驅動第一臂相對于第二臂轉動,以及驅動第二臂相對于底座轉動,由此可以在一定程度上增加機器人的剛度,改善或消除機器人加工過程振動較大、穩定性差而影響零件加工質量和加工效率的問題。
9、在某些實施方式中,所述第一臂設于所述第二臂沿延伸方向的一端,所述底座設于所述第二臂沿延伸方向的另一端。
10、上述機器人中,在一定程度上使得機器人在延伸方向上呈現出緊湊的布局,有利于減少占地面積和提高空間利用率。
11、在某些實施方式中,所述第一臂通過連桿與所述第一滑塊和所述第一絲桿的其中一者連接。
12、上述機器人中,第一驅動機構可以通過連桿驅動第一臂進行運動。
13、在某些實施方式中,所述機器人包括第一平衡件,所述第一臂通過所述第一滑塊或所述第一絲桿與所述第一平衡件可轉動連接,所述第二臂與所述第一平衡件可轉動連接。
14、上述機器人中,在一定程度上使得第一臂和第二臂具有較高的傳動剛度,同時可以四連桿結構可以起到傳遞動力和維持機器人穩定性的作用。
15、在某些實施方式中,所述第一平衡件、所述第一臂、所述第二臂與連桿構成四連桿結構,所述第一臂通過所述連桿與所述第一滑塊和所述第一絲桿的其中一者連接。
16、上述機器人中,在一定程度上使得第一臂和第二臂具有較高的傳動剛度,同時可以在四連桿機構的作用下推動第一臂相對于第二臂轉動。
17、在某些實施方式中,所述機器人包括配重塊,所述配重塊連接所述第一平衡件遠離所述第一臂和所述第二臂的一端。
18、上述機器人中,可以用于調整第一平衡件的整體重量和重心分布,在一定程度上減小第一驅動機構所需的驅動力。
19、在某些實施方式中,所述配重塊是可拆卸的。
20、上述機器人中,在一定程度上提高了機器人的適應性和靈活性,滿足機器人在不同場景下的操作需求。
21、在某些實施方式中,所述機器人包括第二平衡件,所述第二平衡件包括第一部分和第二部分,所述第一部分與所述底座可轉動連接,所述第二部分與所述第二臂可轉動連接,所述第二部分與所述第一部分可伸縮連接。
22、上述機器人中,第二平衡件可以平衡第二臂產生的力矩,在一定程度上保證機器人工作的穩定性。
23、在某些實施方式中,所述第二平衡件包括如下至少一種:氣缸、彈性組件。
24、上述機器人中,在一定程度上減小第二驅動機構所需的驅動力。
25、在某些實施方式中,所述機器人包括第三驅動機構,所述第三驅動機構連接所述第二臂和所述底座,所述第三驅動機構用于驅動所述第二臂相對于所述底座轉動。
26、上述機器人中,可以進一步擴大第二臂的運動范圍。
27、在某些實施方式中,所述機器人包括回轉臺,所述回轉臺與所述第三驅動機構連接,所述第一驅動機構、所述第二驅動機構和所述第二臂設于所述回轉臺上。
28、上述機器人中,第三驅動機構可以帶動回轉臺上所設的所有機構相對于底座一同轉動。
29、在某些實施方式中,所述機器人包括腕關節,所述腕關節與所述第一臂遠離所述第二臂的一端連接,所述腕關節包括三軸驅動機構。
30、上述機器人中,可以使得機器人的腕關節具有三個自由度。
31、本發明實施方式的附加方面和優點將在下面的描述中部分給出,部分將從下面的描述中變得明顯,或通過本發明的實踐了解到。
技術特征:
1.一種機器人,其特征在于,包括:
2.根據權利要求1所述的機器人,其特征在于,所述第一臂設于所述第二臂沿延伸方向的一端,所述底座設于所述第二臂沿延伸方向的另一端。
3.根據權利要求1所述的機器人,其特征在于,所述第一臂通過連桿與所述第一滑塊和所述第一絲桿的其中一者連接。
4.根據權利要求1所述的機器人,其特征在于,所述機器人包括第一平衡件,所述第一臂通過所述第一滑塊或所述第一絲桿與所述第一平衡件可轉動連接,所述第二臂與所述第一平衡件可轉動連接。
5.根據權利要求4所述的機器人,其特征在于,所述第一平衡件、所述第一臂、所述第二臂與連桿構成四連桿結構,所述第一臂通過所述連桿與所述第一滑塊和所述第一絲桿的其中一者連接。
6.根據權利要求4或5所述的機器人,其特征在于,所述機器人包括配重塊,所述配重塊連接所述第一平衡件遠離所述第一臂和所述第二臂的一端。
7.根據權利要求6所述的機器人,其特征在于,所述配重塊是可拆卸的。
8.根據權利要求1所述的機器人,其特征在于,所述機器人包括第二平衡件,所述第二平衡件包括第一部分和第二部分,所述第一部分與所述底座可轉動連接,所述第二部分與所述第二臂可轉動連接,所述第二部分與所述第一部分可伸縮連接。
9.根據權利要求8所述的機器人,其特征在于,所述第二平衡件包括如下至少一種:氣缸、彈性組件。
10.根據權利要求1所述的機器人,其特征在于,所述機器人包括第三驅動機構,所述第三驅動機構連接所述第二臂和所述底座,所述第三驅動機構用于驅動所述第二臂相對于所述底座轉動。
11.根據權利要求10所述的機器人,其特征在于,所述機器人包括回轉臺,所述回轉臺與所述第三驅動機構連接,所述第一驅動機構、所述第二驅動機構和所述第二臂設于所述回轉臺上。
12.根據權利要求1所述的機器人,其特征在于,所述機器人包括腕關節,所述腕關節與所述第一臂遠離所述第二臂的一端連接,所述腕關節包括三軸驅動機構。
技術總結
本發明涉及機器人技術領域,本發明解決或緩解機器人工作時振動大、穩定性差的問題。本發明公開了一種機器人。機器人包括底座、第一臂、第二臂、第一驅動機構和第二驅動機構,第二臂與第一臂和底座可轉動連接,第一驅動機構與第一臂連接,第二驅動機構與第二臂連接;第一驅動機構包括第一滑塊和第一絲桿,通過驅動第一滑塊相對于第一絲桿運動以驅動第一臂相對于第二臂轉動;第二驅動機構包括第二滑塊和第二絲桿,通過驅動第二滑塊相對于第二絲桿運動以驅動第二臂相對于底座轉動。上述機器人中,在一定程度上增加機器人的剛度,改善或消除機器人加工過程振動較大、穩定性差而影響零件加工質量和加工效率的問題。
技術研發人員:栗園園,吳文鏡,張忠耀,陳曉強,陳正興,吳玉強
受保護的技術使用者:廣東美的電氣有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!