一種運動平臺系統的制作方法
本發明涉及一種運動平臺系統,該運動平臺系統包括基座、能夠相對于所述基座移動并允許無限旋轉運動的平臺。該系統由沿著封閉曲線的無端軌道(endless?rail)組成,多個馬達可移動地連接到軌道上。馬達又通過推拉桿連接到可移動平臺。
背景技術:
1、wo2017/202920描述了一種運動平臺系統,包括基座和能夠相對于所述基座沿6個自由度移動的平臺。基座和平臺由八個致動器(actuators)連接。該系統被認為是超定的,因為約束的數量(即至少八個致動器中的每一個的長度隨著兩側關節位置的變化而變化)大于自由度的數量,也就是平臺系統的6個自由度。
2、從us9109743中已知能夠相對于基座移動并允許無限偏航運動作為無限旋轉運動的運動平臺。該公布文件描述了一種能夠沿6個自由度移動的運動平臺。公開了六個能夠沿著圓形軌道運行的馬達。每個馬達都通過桿連接到平臺上。
3、us2012/0286123描述了一種運動平臺,該運動平臺能夠沿著6個自由度移動并允許無限偏航運動。六個支架分別連接到可移動的環上。這些環同心堆疊,能夠彼此獨立旋轉。環的旋轉是通過外部定位的電動馬達實現的,該電動馬達通過齒條齒輪(rack?andpinion)與環嚙合。
4、us6196081描述了一種能夠沿6個自由度移動的移動平臺。公開了六個能夠沿著一個或更多個圓形軌道運行的電動馬達。
5、gb2585945描述了一種運動平臺系統,運動平臺系統包括基座、能夠相對于所述基座移動并允許無限旋轉運動的平臺。該系統由無端圓形軌道(endless?circular?rail)組成。在一個實施例中,6個馬達連接到軌道,其中成對馬達通過長度可控的致動器連接到控制柱。通過在x-y平面內移動控制柱,平臺通過聯接器(coupling)沿著相對于x-y平面成角度的引導件在z方向上移動。該成角度的導軌導致固定的齒輪傳動(fixed?gearing)。本實施例需要12個馬達。在另一個實施例中,9個馬達連接到圓形軌道以控制3個控制柱。一個控制柱通過長度可調的電纜連接到三個馬達。因此,軌道上的每個馬達還配備有電纜纏繞馬達。因此,該實施例需要18個馬達。所述運動平臺系統的缺點是馬達數量多,使系統復雜。每個馬達都需要單獨的電源單元、編碼器,并需要額外的硬件,如電纜布線。此外,馬達串聯使用,這增加了系統控制方面的復雜性,因為需要用可能不同類型的反饋傳感器和不同的馬達特性來串聯調整馬達。馬達的堆疊也嚴重降低了整個控制回路的合規性。另一個缺點是,使用成角度的導軌會導致垂蕩運動(heave?movement)和控制柱運動之間的固定的齒輪傳動。
技術實現思路
1、具有無限旋轉運動的平臺的優點是能夠模擬一個方向上的長時間運動。現有技術運動平臺的缺點是它們的復雜性或它們的低穩定性和較小的工作空間,使其不太適合汽車駕駛模擬等應用。本發明旨在提供一種具有更高穩定性的簡單運動系統,該系統可用于在更大的工作空間內模擬各種機動動作(a?wide?range?of?maneuvers),具有更高的帶寬,從而提供對行駛在道路或賽道上的實際車輛的更真實和準確的模擬。
2、這是通過以下運動平臺系統實現的。一種運動平臺系統,包括基座、能夠相對于所述基座移動并允許無限旋轉運動的平臺,該平臺包括遵循閉合曲線的無端軌道(endlessrail),多個馬達可移動地連接到該軌道,其中馬達又通過推拉桿連接到平臺,
3、其中該運動平臺系統是超定運動平臺系統,包括一個或更多個基座、能夠相對于所述一個或更多個基座沿6個自由度移動并允許無限旋轉運動的平臺,其中兩個或更多個具有不同直徑并遵循閉合曲線的無端軌道連接到同個基座,或者其中遵循封閉曲線的一個無端軌道連接到第一基座,遵循閉合曲線的另一個無端軌道連接到第二基座,并且其中四個或更多個馬達可移動地連接到每個無端軌道,并且其中每個馬達通過推拉桿連接到平臺。
4、申請人發現,超定運動平臺在承載更高有效載荷、增加加速度和/或更高剛度的能力方面比現有技術公開文件us6196081中描述的用六個馬達實施的運動平臺系統具有優勢。這進一步允許更高的控制帶寬和機械安全的設計,其中當單獨馬達(individualmotors)處于分離的極端距離時,平臺不會倒塌或接觸地板。進一步,獲得了具有一倍冗余的冗余系統,在某些情況下甚至具有兩倍冗余的冗余系統。一倍和兩倍冗余(one-fold?andtwo-fold?redundancy)意味著當馬達或推拉桿發生故障時,剩余七個或相應的六個馬達和/或推拉桿仍能完全控制平臺,并可選擇地將平臺帶到安全位置。此外,與傳統的六馬達系統相比,超定系統在增加模擬器的可用工作空間方面具有優勢。如本發明中那樣添加馬達和桿會導致超定系統,并導致較小的運動包絡。申請人發現,盡管如此,本發明的運動平臺系統仍能產生更大、更對稱的工作空間,同時在其運動包絡的較大部分保持穩定性。這可以用這樣的事實來解釋,即通過使用兩個無端軌道,可以解耦平臺在軌道之間的自由度,例如垂蕩和橫搖(heave?and?roll),或俯仰和橫蕩(?pitch?and?sway)等,與現有技術系統相比,允許平臺在多個自由度上進行更大的同時偏移。
5、本發明的運動平臺降低復雜度,因為它使用了八個相似的馬達。此外,一個馬達直接移動一個推拉桿,從而避免了馬達和致動器或馬達和電纜串聯。這比之前參考的現有技術公開文件gb2585945中描述的馬達數量少得多。進一步,平臺系統根據平臺姿態具有可變傳動裝置。通過平臺的預定位,可以利用更多的加速度或速度性能,這在現有技術公開文件gb2585945的平臺中是不太可能的。
6、此外,額外的一個或更多個馬達桿組合(motor-rod?combination?orcombinations)可用于選擇馬達桿組合之間的力分布,該力分布來自存在力對抗(forcefight)的無限解空間(infinite?solution?space)。這可用于在推拉桿上施加預載荷。這種預加載可以避免推拉桿中所謂的零力交叉。這可以防止通過機械部件的反向間隙(backlash)。通過避免通過某些部件的反向間隙進行的運動,可以降低運動平臺系統剛度的非線性。這實現了更大的控制帶寬。
7、一個或更多個基座是通常直接或間接連接到地面的固定元件。基座可以是垂直壁,一個或更多個無端軌道連接到該垂直壁。基座也可以是兩個間隔開的垂直壁,每個垂直壁都連接到無端軌道。然后,連接到垂直壁的無端軌道將在基本垂直的平面內運行。然后,無限旋轉可以是無限橫搖(roll)或無限俯仰運動。
8、基座也可以是兩個間隔開的水平固定元件,例如直接連接到地板的基座和天花板的基座作為間隔開的基座。然后,連接到地板基座和天花板基座的無端軌道將在基本水平的平面內運行(run)。優選地,使用連接到地板的單個基座,其中兩個無端軌道連接到該單個基座。當使用這樣一個或更多個基座(a?base?or?bases)時,無限旋轉將是無限偏航運動。
9、運動平臺可以用一組數學方程(mathematical?equations)來描述,其中方程的數量與約束的數量相匹配。對于該系統,約束的數量將為八個或更多,這等于沿一個或更多個無端軌道(the?endless?rail?or?rails)的可移動馬達的數量。對于本發明的運動平臺系統,由于六個自由度,方程的數量為六個。該系統是超定的,因為約束的數量大于自由度的數量。這種超定系統可能對單個運動有多個數學解,而確定的系統對給定的運動總是有單個數學解。
10、運動平臺的運動由平臺系統的六個自由度限定。平臺運動是通過改變馬達的位置產生的。由于該系統具有比自由度更多的馬達,隨著單獨的馬達位置改變,由于傳感器精度、機械錯位(mechanical?misalignments)、驅動器損耗(losses?in?drives)、接頭摩擦以及運動平臺及其控制系統的其他屬性的限制,系統中會產生力不平衡。
11、超定系統的結果是,根據八個或更多個馬達相對于平臺的定向,存在僅使平臺變形的相對推拉桿力的模式。這被稱為力對抗(force-fight)。為了避免或最小化這種力對抗,優選的是,運動平臺系統設有控制器,該控制器(a)被配置為使所需的平臺運動設定點適應所命令的平臺運動設定點,(b)被配置成移動八個或更多個馬達,以實現所命令的平臺運動設定點,以及(c)被配置為由馬達及其連接的推拉桿在馬達之間在平臺上施加(exercised)的力進行動態重新分配。
12、所命令的和所需的平臺運動設定點可以是平臺位置設定點。優選地,所命令的和所需的平臺運動設定點是平臺位置、速度和加速度的所命令的和所需的設定點。
13、所需的平臺運動設定點可以是模擬程序或例如駕駛模擬程序或飛行模擬程序的主計算機的輸出。所需的運動設定點可以直接從模擬程序或主計算機提供,也可以是運動提示過濾器的輸出。這種運動提示過濾器可以最小化對所需運動提示體驗沒有貢獻的運動。
14、控制器,特別是控制器的部分(c),是基于運動平臺系統的局部線性化的運動方程。由于系統在性能限制之外的非線性,該控制器的穩定性在性能限制以外可能是不利的。進一步,外力,如端部止動阻尼力,可能會作用在未建模或計時不正確的馬達上。出于這些原因,優選使用包括引導模塊的控制器,該引導模塊被配置為通過反向運動(也稱為附加校正運動)將所需的平臺運動設定點適配到所命令的平臺運動設定點,并且被配置為計算力對抗設定點,其中反向運動和力對抗設定點來自使用成本最小化控制策略的模型預測控制算法。平臺系統適當地具有包括平臺和馬達域限制的預定性能限制,其中模型預測控制算法使用成本最小化控制策略,該成本最小化控制策略被配置為將系統保持在其平臺和馬達性能限制內。
15、平臺的反向運動旨在使平臺和馬達保持在性能限制范圍內。力對抗設定點的產生導致推拉桿之間更好的負載平衡,使得不超過馬達電流限制,或使得優化馬達電流。在大多數情況下,力對抗設定點可能為零。例如,當單獨推拉桿超過預定力和/或當單獨馬達和推拉桿組合具有預定和限定的接近零的速度和力對抗設定點時,力對抗設定點可能會偏離零。已經發現,當單獨的馬達和推拉桿組合具有接近零的速度和力設定點時,可能會獲得不穩定的系統,這可能會導致不期望的振動。通過允許小的力對抗,可以避免這種不期望的振動。
16、本發明的超定系統的馬達數量為八個或更多個。在八個的馬達之上,可以在每個或兩個無端軌道上添加一個、兩個或更多個馬達。這些附加馬達優選地通過推拉桿連接到平臺。額外的馬達也可能出現在連接到相同的一個或更多個基座的第三或甚至第四個額外的無端軌道上。這種額外的馬達可能有利于進一步增加可以在平臺上施加的力。優選地,存在兩個無端軌道,其中四個馬達可移動地連接到每個無端軌道。這是有利的,因為它為系統引入的復雜性最小。
17、無端軌道的定義是,馬達可以在平面內沿著優選閉合的曲線在兩個方向上移動。通過這種方式,馬達可以從起始位置沿一個方向移動并返回其起始位置。閉合曲線形狀可以是類橢圓形(oval),優選地是橢圓形(ellipse),更優選地是圓形。可能會出現與圓形形狀的小偏差。
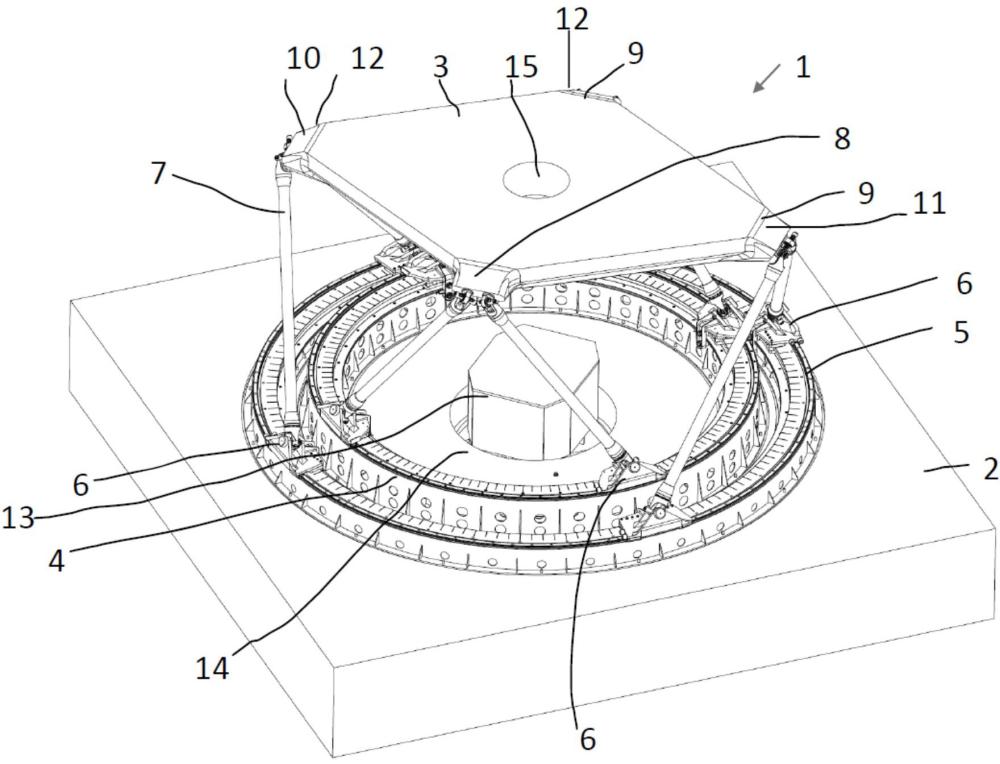
18、八個或更多個馬達可能存在于兩個無端軌道上。優選地,在兩個無端軌道上存在八個馬達,其中四個馬達可移動地連接到第一無端軌道,剩余四個馬達可移動連接到第二無端軌道。在進一步優選實施例中,八個馬達可移動地連接到兩個具有中心的圓形無端軌道,其中兩個無端軌道在同個平面或平行平面內運行。一條公共軸在垂直于一個或更多個平面(the?plane?or?planes)的方向上穿過兩個中心。當兩個環形軌道具有不同的直徑并且連接到同個基座時,內軌道和外軌道被限定。然后,內軌道或其垂直投影將適當地在外軌道內運行。然后,四個或更多個馬達可移動地連接到內軌道,四個或者更多個馬達可移動地連接到外軌道。
19、在第一實施例中,具有內環形軌道和外環形軌道的運動平臺系統連接到一個單個的基座。適當地,該單個基座和內軌道運行的平面之間的距離大于基座和外軌道運行的平面間的距離。這減少了連接到在內軌道上運行的馬達的推拉桿與連接到在外軌道上運行的馬達的推拉桿碰撞的機會。
20、在運動平臺系統的第二實施例中,兩個無端軌道連接到兩個分開的基座。該基座由第一基座和第二基座組成。可移動的平臺位于第一基座和第二基座之間,第一基座連接到第一無端軌道,第二基座連接到第二無端軌道。第一基座例如可以是地板,第二基座可以是建筑物的天花板或連接到所述地板的框架。這樣的實施例是有利的,因為它避免了桿之間的碰撞,將具有更大的工作空間并且更穩定。
21、八個或更多個馬達通過推拉桿單獨連接到平臺。八個或更多個推拉桿在平臺上間隔開的位置適當地連接到平臺,使平臺能夠移動。優選地,平臺上存在四個間隔開的連接區域,其中在每個區域,兩個桿連接到平臺。平臺上的這些第一區域、第二區域、第三區域和第四區域優選地相對于彼此定向,因為連接第一區域和第三區域的假想線(imaginary?line)與連接第二區域和第四區域的假想線直接或在它們在平臺上的投影中相交。
22、優選地,這些線彼此垂直相交。優選地,第一連接區域和第三連接區域之間的距離小于第二連接區域和第四連接區域之間的距離。這可以通過提供菱形形狀的平臺來實現,其中平臺的第一連接區域、第二連接區域、第三連接區域和第四連接區域位于菱形的角部(corners)。這種平臺適當地設置有用于駕駛員的座椅,該座椅為駕駛員限定駕駛方向,該駕駛方向與從第二連接區域和第四連接區域延伸的線一致。通過具有沿著這條較長的線的模擬駕駛方向,通過具有改進的視野而為賽車運動駕駛模擬器等應用優化運動平臺工作空間。
23、對于上述第一和第二實施例,平臺適當地具有上述四個連接區域,該四個連接區域在平臺上彼此間隔開,其中
24、在兩個無端軌道中的第一無端軌道上的兩個相鄰定位的馬達通過推拉桿各自連接到平臺的第二連接區域,
25、第一無端軌道上剩余的兩個相鄰定位的馬達通過推拉桿各自連接到平臺的第四連接區域,以及
26、在兩個無端軌道中的第二無端軌道上的兩個相鄰定位的馬達通過推拉桿各自連接到平臺的第一連接區域,
27、第二無端軌道上剩余的兩個相鄰定位的馬達通過推拉桿各自連接到平臺的第三連接區域。這種設置允許大的組合縱蕩(surge)和橫蕩(sway)運動,同時保持穩定性并避免推拉桿之間的碰撞。
28、推拉桿是一個剛性元件。優選地,推拉桿由輕質、高剛度材料制成,該輕質、高剛度材料諸如是金屬合金,更優選是碳纖維。
29、推拉桿在一端連接到馬達,在其另一端連接到平臺。一個馬達通過單個推拉桿連接到平臺。推拉桿和馬達之間以及推拉桿和平臺之間的連接使得平臺可以進行6個自由度的運動。連接是通過接頭實現的。當平臺需要某些縱蕩和橫蕩偏移(surge?and?swayexcursions)時,需要具有寬運動范圍的接頭。除了接頭范圍外,接頭優選具有足夠的接頭剛度。
30、優選地,推拉桿通過具有兩個或更多個自由度的下接頭連接到馬達。可能的接頭示例包括球窩接頭(ball?joints)、萬向接頭和柔性接頭。上下接頭的優選組合是兩個球窩接頭、球窩接頭和萬向接頭、兩個萬向接頭。如果萬向接頭同時用于下接頭和上接頭,則應增加額外的自由度。這可以通過將桿可旋轉地連接到接頭中一個或兩個來實現,其中旋轉是沿著桿的軸線進行的。推拉桿還可以包括柔性元件,以提供離軸柔順性,同時保持軸向剛性結構。或者,推拉桿可以包括兩個對齊的桿部分,其中桿的一部分可以通過中心軸承組件相對于桿的另一部分沿著公共軸線旋轉。
31、優選地,下接頭和上接頭是具有雙側懸架(double?sided?suspension)的萬向接頭。當需要較大的偏移時,優選使用由在一側懸掛的軸組成的上部接頭,例如帶有兩個預加載軸承。兩個軸承都適當地安裝在連接區域處集成在移動模擬器框架中的軸承箱中。與雙側懸掛軸相比,單側懸掛允許更寬的運動范圍。在平臺的連接區域中,可能存在兩個接頭。兩個接頭的軸優選地相對于彼此平行定位。
32、推拉桿優選地旋轉連接到下接頭和/或上接頭。旋轉連接意味著桿本身可以相對于下機頭和上接頭之一或兩者沿其自身軸線旋轉。這是有利的,因為推拉桿組件中可以加入一定量的柔順性,從而在運動系統包絡內實現更大的工作空間利用率。
33、馬達可以是通過齒條齒輪可移動地連接到軌道的電動馬達。cn107317446、wo2019/192228和us6196081中描述了這種連接的示例。
34、優選地,馬達是線性馬達,也稱為線性電動馬達。線性馬達包括一個可移動的電樞(armature),該電樞與無端軌道中存在的固定磁軌相互作用。通過電樞和磁體的磁相互作用,馬達能夠沿著無端軌道移動。
35、線性馬達可以是鐵芯或空氣芯線性電動馬達。線性馬達優選地設置有兩個線圈包,該兩個線圈包通過結構構件連接到馬達。在優選配置中,永磁體安裝在垂直管狀部分的內表面和外表面上。兩個線圈包從線性馬達向下延伸,使得一個線圈包在垂直管狀部分的徑向外表面面向磁體,另一個線圈包在垂直管狀部分的徑向內表面面向磁體。在這種配置中,可移動馬達的一個線圈包因此直接位于安裝在管狀部分內表面上的磁體旁邊,第二個線圈包直接位于安裝于垂直管狀部分外表面上的磁體旁邊。這種雙側設計使線性馬達保持緊湊高效,同時是振動最小化,平衡磁體對線圈包的吸引力。緊湊型馬達是有利的,因為它導致無端軌道上的弧長較小,從而增加了馬達和推拉桿組合的可用偏移。
36、在可替代的配置中,線性馬達設有2個線圈包,該2個線圈包通過結構構件連接,使得一個線圈包位于無端軌道中存在的固定磁體的永磁體上方,另一個線圈包位于無端軌道上存在的固定磁鐵的永磁體下方。
37、us9109743的運動平臺具有作為圓形軌道一部分的轉子,其問題在于需要專門的伺服驅動器來控制馬達。因此,優選的是,無端軌道包括永磁體的無端軌道部分、無端托架導軌部分和無端支撐軌道部分,支撐托架可移動地連接到該無端托架導軌部分。線性馬達可移動地且功能性地接合到包括永磁體的無端軌道。線性馬達連接到支撐托架上,并由履帶滾輪(track?rollers)支撐在支撐軌道上。
38、無端托架導軌優選地在永磁體的無端軌道部分的徑向外側運行。無端支撐軌道優選地從永磁體的無端軌道部分徑向向內運行,并且可以在與永磁體的無端軌道部分相同或不同的平面內運行。
39、線性馬達由電流供電和控制。因此,每個線性馬達優選地通過電纜連接到配電和控制單元。這種配電和控制單元適當地定位在由一個或更多個無端軌道(the?endlessrail?or?rails)包圍的空間中。由一個或更多個無端軌道包圍的空間是平臺下方或上方的空間,位于從一個或更多個無端軌道垂直延伸的假想柱內。優選地,配電和控制單元適當地定位在平臺下方或上方的基座上,并位于一個或更多個無端軌道內。為了實現平臺的無限偏航運動,配電和控制單元能夠在基座上移動以允許無限偏航運動。
40、本發明還涉及以下運動平臺系統,包括一個或更多個基座,能夠相對于所述一個或更多個基座沿6個自由度移動的平臺,并允許無限偏航運動,其中,遵循閉合曲線的一個或更多個無端軌道連接到一個或更多個基座,其中,六個或更多個馬達可移動地連接到一個或更多個無端軌道,其中,每個馬達通過推拉桿連接到平臺,其中,用于六個或更多個馬達的配電和控制單元存在于由無端軌道包圍的空間中,其中,配電和控制單元通過一個或更多個電纜單獨連接到六個或更多個馬達中的每一個,其中,配電和控制單元是可移動的,以允許無限偏航運動。
41、在上述實施例中,配電和控制單元適當地定位在平臺下方或上方的基座上,并位于一個或更多個無端軌道內。為了實現平臺的無限偏航運動,配電和控制單元能夠在基座上移動,以允許無限偏航運動。該一個或更多個基座適當地是如上所述的主要發明的一個或兩個基座。一個或更多個無端軌道優選為一個或兩個無端軌道。包括具有一個或更多個基座的兩個無端軌道的適當實施例的示例是針對本發明描述的那些。
- 還沒有人留言評論。精彩留言會獲得點贊!