基于玻璃平板進(jìn)行光束掃描的面陣探測器簡便定焦方法
本發(fā)明涉及一種基于玻璃平行平板進(jìn)行光束掃描的面陣探測器簡便定焦方法,屬于光學(xué)測量儀器領(lǐng)域。
背景技術(shù):
1、在光電自準(zhǔn)直儀中,點(diǎn)光源發(fā)出的光經(jīng)準(zhǔn)直物鏡后準(zhǔn)直成為平行光,平行光經(jīng)平面反射鏡反射到物鏡上,經(jīng)物鏡聚焦后匯聚到焦點(diǎn)上,讓探測器(ccd或cmos)位于物鏡的焦平面上,那么探測器就能采集到一個光斑圖像,光電自準(zhǔn)直儀光路原理圖如圖1所示。當(dāng)反射鏡的角度發(fā)生偏轉(zhuǎn)時,探測器上的光斑的位置也會隨之發(fā)生變化,通過質(zhì)心計(jì)算算法可以得到每個光斑的質(zhì)心,比較前后質(zhì)心位置的變化可以得到一個位移量,然后通過幾何關(guān)系可以計(jì)算出反射鏡的角度變化。在光電自準(zhǔn)直儀中,探測器是否準(zhǔn)確安裝到物鏡焦平面上對于測角精度有著較大的影響。而這類系統(tǒng)在使用過程中由于溫度變化以及環(huán)境震動等干擾因素的存在,會使原本完成定焦的系統(tǒng)發(fā)生偏移,因此其在使用前都需檢查系統(tǒng)是否處于離焦?fàn)顟B(tài),重新完成定焦后才能進(jìn)行后續(xù)的測量工作。光電自準(zhǔn)直儀通過計(jì)算前后光斑的質(zhì)心的變化量來測得角度的變化,所以在光電自準(zhǔn)直儀的安裝調(diào)校過程中,探測器是否準(zhǔn)確安裝到物鏡的焦平面處直接影響到測角的精度與可靠性。當(dāng)待測件存在較大偏轉(zhuǎn)角,自準(zhǔn)直發(fā)出的測量光束只有部分反射光線能夠回到自準(zhǔn)直系統(tǒng)中。理論上,如果探測器正好處于焦平面上,各部分的光線聚焦到同一點(diǎn)上,所以無論哪一部分的光線用于測角,得到的數(shù)據(jù)都是一樣的。但是如果探測器處于離焦?fàn)顟B(tài),那么不同位置的光線聚焦到探測器上的光斑的質(zhì)心位置就會發(fā)生變化。因此需要對探測器的安裝位置進(jìn)行精準(zhǔn)定焦,確保口徑內(nèi)任意位置的光束聚焦后的光斑的質(zhì)心位于同一位置,以此來確保測角的精度。在衛(wèi)星相機(jī)中,如果探測器不能準(zhǔn)確安裝到焦平面上,那么采集到的圖像就會模糊不清。因此一種簡單可靠且高精度的探測器定焦方法在這種探測器需要精準(zhǔn)定焦的系統(tǒng)中是至關(guān)重要的。
2、傳統(tǒng)的定焦方法中,和本發(fā)明最相似的方案為光斑直徑法。根據(jù)幾何光學(xué)原理,平行光經(jīng)過物鏡后聚焦在焦平面上,匯聚成一個光點(diǎn),在焦平面上光斑的直徑最小。保持光路其余部分不變,沿光軸方向前后移動探測器,在不同的位置采集光斑圖像,然后對光斑圖像進(jìn)行去噪、邊緣提取等圖像處理操作,可以得到光斑直徑的大小。然后比較軸向不同位置處光斑直徑,當(dāng)光斑直徑最小時,便認(rèn)為探測器處于焦平面位置了。
3、這種方法在定焦過程中需要來回移動探測器的位置,定焦過程較為繁瑣,也無法在結(jié)構(gòu)固定的系統(tǒng)中使用。而且在探測器處于離焦?fàn)顟B(tài)時,無法根據(jù)探測器采集到的光斑圖像判斷此時探測器是處于焦平面之前還是之后。此方法通過光斑的直徑變化來判斷探測器是否安裝到位,理論上光斑定位精度最高為亞像素精度,所以在高精度光電自準(zhǔn)直系統(tǒng)中,探測器的焦平面定位精度就會成為制約測角精度進(jìn)一步提升的關(guān)鍵因素。
技術(shù)實(shí)現(xiàn)思路
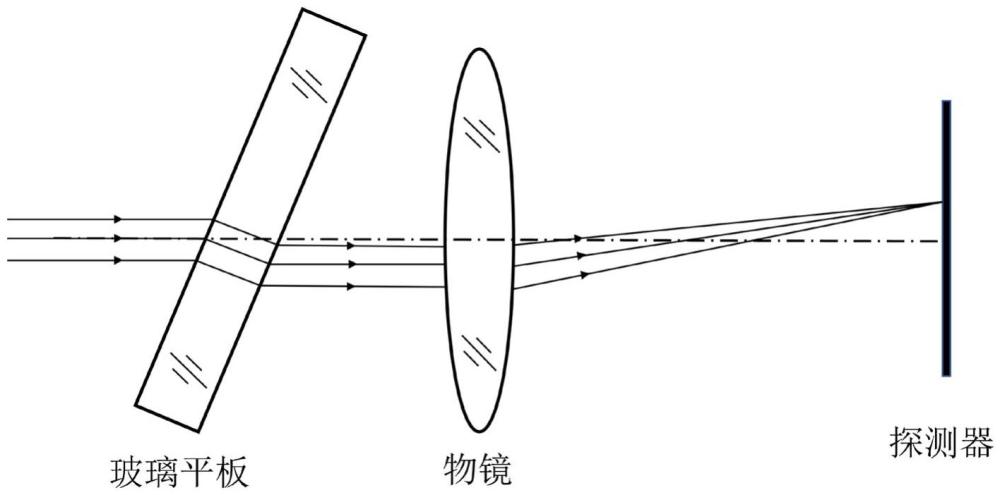
1、為了解決現(xiàn)有自準(zhǔn)直儀定焦方法精度低且定焦繁瑣的問題,本發(fā)明的目的是提供一種基于玻璃平行平板進(jìn)行光束掃描的面陣探測器簡便定焦方法,該方法在物鏡前放置一塊玻璃平行平板,通過玻璃平行平板的細(xì)光束經(jīng)物鏡聚焦后落到探測器上形成一光斑,通過質(zhì)心計(jì)算算法可以得到這個光斑質(zhì)心的位置,然后轉(zhuǎn)動平行平板,若轉(zhuǎn)動前后對應(yīng)光斑的質(zhì)心處于探測器的同一位置,此時探測器恰好處于物鏡的焦平面上,說明探測器已經(jīng)安裝到位,若是各個質(zhì)心的位置之間存在偏差,則說明探測器此時處于離焦?fàn)顟B(tài),需要調(diào)整安裝位置。本發(fā)明的質(zhì)心定位精度可以達(dá)到百分之一像素的精度。
2、本發(fā)明的目的是通過下述技術(shù)步驟實(shí)現(xiàn)的。
3、基于玻璃平行平板進(jìn)行光束掃描的面陣探測器簡便定焦方法,包括如下步驟:
4、步驟一、在物鏡前放置玻璃平行平板,平行平板與光束垂直,細(xì)平行入射光通過玻璃平行平板后經(jīng)物鏡聚焦到探測器上形成光斑,探測器采集得到光斑圖像,然后通過質(zhì)心計(jì)算算法得到光斑質(zhì)心的位置;
5、步驟二、轉(zhuǎn)動玻璃平行平板,采集玻璃平行平板不同轉(zhuǎn)動角度的光斑圖像,分別計(jì)算得到各個光斑的質(zhì)心,與步驟一形成的光斑質(zhì)心的位置進(jìn)行比較,判斷探測器此時是處于焦前還是焦后;
6、步驟三、通過步驟一、步驟二的光斑質(zhì)心位置,得到離焦量△d:
7、
8、式中,f為物鏡的焦距,h為兩個光斑質(zhì)心之間的距離,l為旋轉(zhuǎn)平行平板前后細(xì)光束的中心間距,根據(jù)斯涅爾定律計(jì)算得到,計(jì)算過程如式(2)所示:
9、
10、θ3=θ1-θ2?????????????????????????????????(3)
11、
12、式中,n1為空氣折射率,n2為玻璃平行平板折射率,d為玻璃平行平板厚度,θ1為玻璃平行平板旋轉(zhuǎn)角度,θ2為光線在玻璃內(nèi)與法線的夾角,θ3為光線在玻璃內(nèi)與入射光線夾角;
13、步驟四、在結(jié)構(gòu)已經(jīng)固定的系統(tǒng)中,通過在探測器安裝處增減墊片來完成精確的定焦調(diào)整,依據(jù)此前判斷探測器處于焦前或焦后以及計(jì)算出的離焦量決定墊片的增減或者對墊片做適當(dāng)?shù)哪ハ鳎赐瓿商綔y器簡便定焦。
14、如果對探測器定焦精度要求不高,則只需采集兩次圖像即可完成定焦,旋轉(zhuǎn)玻璃平行平板產(chǎn)生兩束在豎直方向上偏差較遠(yuǎn)的平行光束,然后分別采集光斑圖像,計(jì)算兩幅圖像中光斑質(zhì)心的位置,根據(jù)公式(1)計(jì)算得到離焦量。
15、如果探測器需要高精度定焦,在口徑內(nèi)多次旋轉(zhuǎn)玻璃平行平板并分別采集光斑圖像,依據(jù)上述計(jì)算離焦量的方法分別計(jì)算出離焦量,所述離焦量受各種像差的影響并不一致,利用最小二乘法對所述離焦量進(jìn)行擬合得到方差最小時的離焦量,參考方差最小時的離焦量進(jìn)行探測器定焦。
16、有益效果:
17、1、本發(fā)明公開的一種基于玻璃平行平板進(jìn)行光束掃描的面陣探測器簡便定焦方法,在物鏡前放置一塊玻璃平行平板,通過玻璃平行平板的細(xì)光束經(jīng)物鏡聚焦后落到探測器上形成一光斑,通過質(zhì)心計(jì)算算法可以得到這個光斑質(zhì)心的位置,然后轉(zhuǎn)動平行平板,若轉(zhuǎn)動前后對應(yīng)光斑的質(zhì)心處于探測器的同一位置,此時探測器恰好處于物鏡的焦平面上;因?yàn)樵诙ń惯^程中不需要來回移動探測器或多次更換墊片,只需改變平行平板的旋轉(zhuǎn)角度,然后比較探測器上光斑質(zhì)心位置變化,即可完成定焦,所以在結(jié)構(gòu)固定系統(tǒng)中的使用不受限制,并且定焦方法簡潔,定焦精度高;
18、2、本發(fā)明公開的一種基于玻璃平行平板進(jìn)行光束掃描的面陣探測器簡便定焦方法,該方法將帶玻璃平行平板置于物鏡前方,通過玻璃平行平板的角度實(shí)現(xiàn)在物鏡口徑內(nèi)的光束掃描,定焦方法基于光學(xué)系統(tǒng)原本的光路,不需額外搭建系統(tǒng),而且方法所用儀器簡單,所有光學(xué)實(shí)驗(yàn)室均具備實(shí)現(xiàn)條件。
19、3、本發(fā)明公開的一種基于玻璃平行平板進(jìn)行光束掃描的面陣探測器簡便定焦方法,如果對探測器定焦精度要求不高,則只需采集兩次圖像即可完成定焦,旋轉(zhuǎn)玻璃平行平板產(chǎn)生兩束在豎直方向上偏差較遠(yuǎn)的平行光束,然后分別采集光斑圖像,計(jì)算兩幅圖像中光斑質(zhì)心的位置,根據(jù)離焦量公式計(jì)算得到離焦量。如果探測器需要高精度定焦,在口徑內(nèi)多次旋轉(zhuǎn)玻璃平行平板并分別采集光斑圖像,依據(jù)上述計(jì)算離焦量的方法分別計(jì)算出離焦量,所述離焦量受各種像差的影響并不一致,利用最小二乘法對所述離焦量進(jìn)行擬合得到方差最小時的離焦量為參考進(jìn)行探測器定焦。依據(jù)實(shí)際使用需求選擇定焦操作,既可以實(shí)現(xiàn)簡單快速的定焦,也能夠?qū)崿F(xiàn)高精度的定焦操作。
- 還沒有人留言評論。精彩留言會獲得點(diǎn)贊!