一種石墨舟拆卸機構的制作方法
本技術屬于自動拆卸設備,尤其是涉及一種石墨舟拆卸機構。
背景技術:
1、石墨舟是太陽能電池片鍍減反射膜時的一種載體。石墨舟由多個豎直放置的相互平行的舟片組成。陶瓷桿穿過舟片兩端采用螺母進行固定,舟片之間安裝有陶瓷隔環,在舟片的兩端安裝有舟腳,舟腳上穿設有石墨桿和陶瓷桿。經過多次鍍膜的石墨舟需要定期到專用的清洗設備里清洗,同時需要將石墨舟整舟拆散,更換每個舟片上的卡點。在現有技術中,通常采用人工對石墨舟整舟進行拆卸,拆卸效率較低,且操作不規范易對舟片造成損壞。
技術實現思路
1、為解決上述技術問題,本實用新型提供一種石墨舟拆卸機構,有效的解決了拆卸效率較低、操作不規范的問題,克服了現有技術的不足。
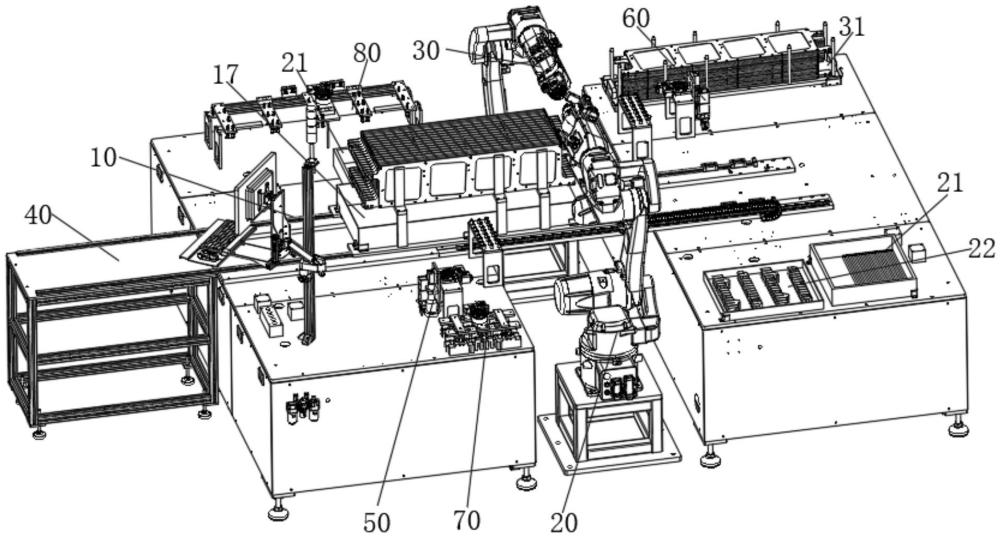
2、本實用新型采用的技術方案是:一種石墨舟拆卸機構,包括:
3、位移平臺,用于承載石墨舟,可帶動所述石墨舟沿長度方向移動;
4、第一機器人和第二機器人,分別設置在所述位移平臺的兩側,對所述石墨舟進行拆卸,所述第一機器人和第二機器人可更換不同的快換夾具用于拆卸所述石墨舟的不同部位。
5、進一步,所述位移平臺包括導軌和滑臺,所述第一機器人和第二機器人分別設置在所述導軌的兩側,所述滑臺可沿所述導軌移動,所述滑臺上設有支撐架,用于放置所述石墨舟。
6、進一步,所述支撐架的頂部設有支撐定位片,所述支撐定位片可插入所述石墨舟的舟片之間。
7、進一步,所述支撐架的底部設有第一收集盒,用于收集拆卸下來的固定螺母和陶瓷隔環。
8、進一步,所述快換夾具包括,
9、第一快換夾具和第二快換夾具,分別設置在所述第一機器人側和所述第二機器人側,可分別與所述第一機器人和第二機器人可拆卸式連接,用于拆卸所述石墨舟的固定螺母、陶瓷桿和石墨桿;
10、第三快換夾具,設置在所述第一機器人側,可與所述第一機器人可拆卸式連接,用于拆卸所述石墨舟的舟腳;
11、第四快換夾具,設置在所述第二機器人側,可與所述第二機器人可拆卸式連接,用于拆卸所述石墨舟的舟片。
12、進一步,所述第一快換夾具、第二快換夾具、第三快換夾具和第四快換夾具上均設有快換對接模塊。
13、進一步,所述第一快換工具和第二快換工具均包括攝像頭和旋轉夾爪,所述攝像頭用于所述旋轉夾爪的定位,所述旋轉夾爪用于轉動所述石墨舟的固定螺母或者夾持所述石墨舟的陶瓷桿和石墨桿。
14、進一步,所述第三快換工具包括上部夾爪和下部夾爪,所述上部夾爪和下部夾爪可分別對所述石墨舟的上舟腳和下舟腳同時夾持。
15、進一步,所述第四快換工具包括多個吸嘴模塊,所述吸嘴模塊并排設置,用于吸附所述石墨舟的舟片。
16、進一步,還包括第二收集盒、第三收集盒和舟片收集裝置,所述第二收集盒用于收集所述石墨舟的陶瓷桿和石墨桿,所述第三收集盒用于收集所述石墨舟的舟腳。
17、本實用新型具有的優點和積極效果是:由于采用上述技術方案,取代了傳統的人工作業方式,實現了石墨舟整舟拆卸的自動化,節省了人力,提高了工作效率和操作的規范性。
技術特征:
1.一種石墨舟拆卸機構,其特征在于,包括:
2.根據權利要求1所述的一種石墨舟拆卸機構,其特征在于:所述位移平臺包括導軌和滑臺,所述第一機器人和第二機器人分別設置在所述導軌的兩側,所述滑臺可沿所述導軌移動,所述滑臺上設有支撐架,用于放置所述石墨舟。
3.根據權利要求2所述的一種石墨舟拆卸機構,其特征在于:所述支撐架的頂部設有支撐定位片,所述支撐定位片可插入所述石墨舟的舟片之間。
4.根據權利要求3所述的一種石墨舟拆卸機構,其特征在于:所述支撐架的底部設有第一收集盒,用于收集拆卸下來的固定螺母和陶瓷隔環。
5.根據權利要求1所述的一種石墨舟拆卸機構,其特征在于:所述第一快換夾具、第二快換夾具、第三快換夾具和第四快換夾具上均設有快換對接模塊。
6.根據權利要求1所述的一種石墨舟拆卸機構,其特征在于:所述第一快換夾具和第二快換夾具均包括攝像頭和旋轉夾爪,所述攝像頭用于所述旋轉夾爪的定位,所述旋轉夾爪用于轉動所述石墨舟的固定螺母或者夾持所述石墨舟的陶瓷桿和石墨桿。
7.根據權利要求5或6所述的一種石墨舟拆卸機構,其特征在于:所述第三快換夾具包括上部夾爪和下部夾爪,所述上部夾爪和下部夾爪可分別對所述石墨舟的上舟腳和下舟腳同時夾持。
8.根據權利要求7所述的一種石墨舟拆卸機構,其特征在于:所述第四快換夾具包括多個吸嘴模塊,所述吸嘴模塊并排設置,用于吸附所述石墨舟的舟片。
9.根據權利要求1-6和8任一所述的一種石墨舟拆卸機構,其特征在于:還包括第二收集盒、第三收集盒和舟片收集裝置,所述第二收集盒用于收集所述石墨舟的陶瓷桿和石墨桿,所述第三收集盒用于收集所述石墨舟的舟腳。
技術總結
本技術提供一種石墨舟拆卸機構,包括位移平臺、第一機器人和第二機器人,所述位移平臺用于承載石墨舟,可帶動所述石墨舟沿長度方向移動,所述第一機器人和第二機器人分別設置在所述位移平臺的兩側,對所述石墨舟進行拆卸,所述第一機器人和第二機器人可更換不同的快換夾具用于拆卸所述石墨舟的不同部位。本技術的有益效果是取代了傳統的人工作業方式,實現了石墨舟整舟拆卸的自動化,節省了人力,提高了工作效率和操作的規范性。
技術研發人員:靳立輝,楊驊,姚長娟,耿名強,劉永富,毛建勇,陳江松,汪炳林
受保護的技術使用者:天津環博科技有限責任公司
技術研發日:20240617
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!