一種集成捕捉器的晶體爐的控制方法與流程
本發明涉及晶體爐控制,具體涉及一種集成捕捉器的晶體爐的控制方法。
背景技術:
1、隨著晶體生長技術的不斷發展,對晶體質量的要求越來越高。在晶體生長過程中,熔體中的漂浮物會嚴重影響晶體的質量和性能。
2、在現有的晶體生長設備中,坩堝的轉動通常是為了促進熔體的均勻性和對流,但這種轉動也可能導致漂浮物在熔體表面的分布更加復雜,增加了去除漂浮物的難度,傳統的晶體爐通常沒有專門的裝置來去除熔體表面的漂浮物,這使得晶體生長過程中容易受到雜質的干擾,導致生長出的晶體缺陷增多、性能下降。
技術實現思路
1、鑒于現有技術中的上述缺陷或不足,本發明旨在提供一種集成捕捉器的晶體爐的控制方法,用以去除熔體表面的漂浮物。
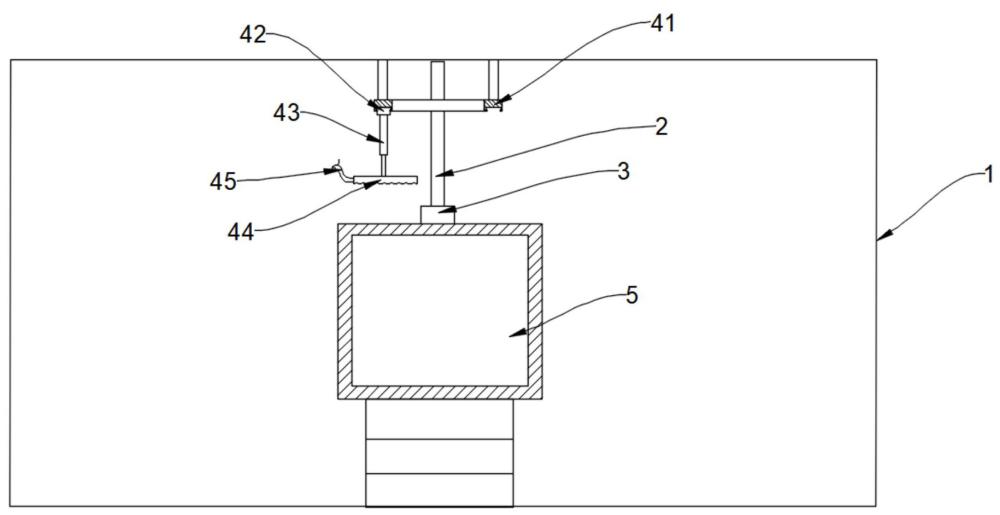
2、該控制方法基于集成捕捉器的晶體爐實現,所述晶體爐包括:
3、爐體,所述爐體內開設有中空腔體,所述中空腔體內設有用于容納熔體的坩堝,所述坩堝以延伸方向為所述爐體高度方向的第一轉動軸轉動,所述爐體頂部具有爐體頂板;
4、籽晶桿,所述籽晶桿垂直設于所述爐體頂板上,所述籽晶桿至少包括用于放置籽晶的晶體生長平臺,所述晶體生長平臺在所述中空腔體內沿所述爐體高度方向移動;
5、捕捉組件,所述捕捉組件設于所述爐體頂板上、且套設在所述籽晶桿外,所述捕捉組件至少包括捕捉器主體以及驅動組件,所述驅動組件用于驅動所述捕捉器主體繞所述第一轉動軸轉動和/或沿所述爐體高度方向移動;
6、所述控制方法包括以下步驟:
7、實時獲取第一預設時長內的若干張所述熔體的熔體表面的表面熱成像,并根據若干張所述表面熱成像,判斷熔體表面是否具有漂浮物;
8、若所述熔體表面具有所述漂浮物時,判斷所述漂浮物的漂浮位置是否變化,若所述漂浮位置未變化時,則獲取目標高度和目標區域,所述目標高度為所述熔體表面距離所述中空腔體底部的高度;所述目標區域為所述熔體表面上具有漂浮物的區域;
9、獲取所述捕捉器主體的當前位置,根據所述當前位置和所述目標高度,得到第一目標垂直位移,根據所述當前位置和所述目標區域,得到目標轉動角度;
10、控制所述捕捉器主體繞所述第一轉動軸轉動所述目標轉動角度后,控制所述捕捉器主體下移所述第一目標垂直位移,并控制所述捕捉器主體對漂浮物進行捕捉。
11、根據本發明提供的技術方案,所述驅動組件至少包括:
12、第一環形滑槽,所述第一環形滑槽設于所述爐體頂板上、且所述第一環形滑槽與所述第一轉動軸同心設置;
13、第一滑動塊,所述第一滑動塊滑動連接于所述第一環形滑槽內,所述第一滑動塊遠離所述第一環形滑槽側連接有所述捕捉器主體;
14、第一驅動電機,所述第一驅動電機用于驅動所述第一滑動塊滑動,以使所述捕捉器主體繞所述第一轉動軸轉動。
15、根據本發明提供的技術方案,所述熔體表面包括若干個相鄰的、且同心分布的徑向表面區域;所述第一滑動塊遠離所述第一環形滑槽側連接有升降機構,所述升降機構遠離所述第一滑動塊側與所述捕捉器主體連接,所述捕捉器主體沿所述坩堝的徑向延伸,且徑向延伸長度為坩堝內容納空間的半徑與晶體生長平臺的半徑之差,所述升降機構用于使所述捕捉器主體沿所述爐體高度方向升降。
16、根據本發明提供的技術方案,所述爐體頂板上設有熱成像儀,所述熱成像儀用于拍攝所述熔體表面的表面熱成像;所述捕捉器主體內具有捕捉腔體,所述捕捉器主體上具有沿其延伸方向均勻分布的多個捕捉孔,各所述捕捉孔與所述捕捉腔體連通,所述捕捉器主體的所述捕捉腔體通過第一連接管與捕捉器真空泵連通;每個所述捕捉孔配備有對應的第一開關,所述第一開關具有初始狀態和開啟狀態,所述開啟狀態下,所述第一開關打開對應的所述捕捉孔,以對漂浮物進行捕捉,所述初始狀態下,所述第一開關關閉對應的所述捕捉孔。
17、根據本發明提供的技術方案,所述判斷所述漂浮物的漂浮位置是否變化之后,還包括以下步驟:
18、若所述漂浮位置變化時,根據若干張所述表面熱成像,得到位置變化信息,所述位置變化信息至少包括所述漂浮物的移動速度、以及預測移動路徑;
19、根據所述位置變化信息,得到控制參數,所述控制參數至少包括目標滑動速度以及目標滑動方向,所述目標滑動速度為所述第一滑動塊在所述第一環形滑槽內的滑動速度;所述目標滑動方向包括所述第一滑動塊順時針滑動或逆時針滑動;
20、獲取第二目標垂直位移,控制所述捕捉器主體下移所述第二目標垂直位移后,開啟所述捕捉器真空泵,并控制所述第一滑動塊在所述控制參數下運動,以使所述捕捉器主體繞所述第一轉動軸持續轉動;所述第二目標垂直位移小于所述第一目標垂直位移。
21、根據本發明提供的技術方案,所述并控制所述捕捉器主體對漂浮物進行捕捉,具體包括以下步驟:
22、獲取所述目標區域的區域長度,所述區域長度為所述目標區域沿所述熔體表面的徑向的長度;
23、當所述區域長度小于所述徑向延伸長度時,根據所述區域長度,得到目標捕捉孔,所述目標捕捉孔為所述捕捉器主體上與所述目標區域對應的區域內的捕捉孔;
24、控制所述目標捕捉孔對應的所述第一開關由所述初始狀態切換至所述開啟狀態,除所述目標捕捉孔之外的捕捉孔內的所述第一開關保持所述初始狀態不變。
25、根據本發明提供的技術方案,所述判斷所述熔體表面是否具有漂浮物之后,還包括以下步驟:
26、若所述熔體表面不具有漂浮物時,根據所述表面熱成像,得到所述熔體表面的溫度均勻度;
27、若所述溫度均勻度小于目標均勻度時,則獲取所述坩堝的坩堝旋轉方向和坩堝旋轉速度;
28、若所述坩堝旋轉速度大于或等于第一預設速度時,根據所述溫度均勻度與所述目標均勻度的均勻度偏差,得到協同參數,所述協同參數至少包括第三目標垂直位移和與所述第三目標垂直位移對應的協同滑動速度;
29、控制所有所述第一開關保持所述初始狀態不變或所述捕捉器真空泵關閉,并當所述捕捉器主體下移所述第三目標垂直位移后,控制所述第一滑動塊在所述協同滑動速度下繞與所述坩堝旋轉方向相同的方向滑動,以使所述捕捉器主體繞所述第一轉動軸持續轉動。
30、根據本發明提供的技術方案,所述控制所述第一滑動塊在所述協同滑動速度下繞與所述坩堝旋轉方向相同的方向滑動之后,還包括以下步驟:
31、當所述捕捉器主體繞所述第一轉動軸持續轉動第二預設時長后,獲取所述第二預設時長的結束時刻下的所述表面熱成像,進而得到實時溫度均勻度;
32、若所述實時溫度均勻度小于所述目標均勻度時,控制所述第一滑動塊繞與所述坩堝旋轉方向相反的方向滑動。
33、根據本發明提供的技術方案,所述控制所述第一滑動塊繞與所述坩堝旋轉方向相反的方向滑動,具體包括以下步驟:
34、根據所述實時溫度均勻度,獲取提拉高度以及與所述提拉高度對應的更新后協同滑動速度,所述提拉高度為所述捕捉器主體向靠近所述爐體頂板側上升的高度;
35、控制所述捕捉器主體上升所述提拉高度后,所述第一滑動塊繞與所述坩堝旋轉方向相反的方向以所述更新后協同滑動速度滑動。
36、與現有技術相比,本發明的有益效果在于:本發明中捕捉組件的設置可以有效地去除熔體表面的漂浮物,提高晶體生長的質量,捕捉器主體可以繞第一轉動軸轉動和/或沿爐體高度方向移動,能夠靈活地調整位置和角度,適應不同的晶體生長條件和漂浮物分布情況,從而提高漂浮物的捕捉效率。捕捉組件設于爐體頂板上且套設在籽晶桿外,實現了籽晶桿與去除漂浮物裝置的協同工作,在晶體生長過程中,籽晶桿的移動和捕捉器主體的轉動、移動可以相互配合,提高晶體生長的效率;控制方法則基于晶體爐通過實時監測熔體表面是否有漂浮物,針對性地對漂浮物進行捕捉,可有效防止這些漂浮物混入正在生長的晶體中,避免其成為晶體中的雜質,使晶體生長過程更加穩定和可控,從而提升晶體的純度和內部結構質量。
- 還沒有人留言評論。精彩留言會獲得點贊!