用于控制車輛速度的控制裝置及方法與流程
本公開大體上涉及一種用于控制車輛的車輛速度的方法。本公開還大體上涉及一種配置成控制車輛的車輛速度的控制裝置。此外,本公開大體上涉及計(jì)算機(jī)程序以及計(jì)算機(jī)可讀介質(zhì)。此外,本公開大體上涉及配置成控制車輛的車輛速度的巡航控制系統(tǒng)。本公開大體上還涉及一種車輛。
背景技術(shù):
1、現(xiàn)今,重型車輛(諸如公共汽車和卡車)通常配備有配置成控制車輛的操作的各種控制系統(tǒng),以實(shí)現(xiàn)各種目的,諸如改善安全性、降低車輛的能耗和/或改善駕駛員的舒適度。這些控制系統(tǒng)中的一些控制系統(tǒng)配置成考慮例如有關(guān)即將到來(lái)的路段的特征的數(shù)據(jù)預(yù)測(cè)在根據(jù)不同的控制策略控制車輛的情況下車輛的未來(lái)行為。此后,可以使用通過(guò)模擬確定的這些預(yù)測(cè)以便確定用于針對(duì)即將到來(lái)的路段控制車輛的最適當(dāng)策略。
2、配置成控制車輛的操作的一些控制系統(tǒng)可以由例如車輛的駕駛員啟動(dòng)和停用。在某些情形下,此類控制系統(tǒng)可以使車輛與駕駛員可能預(yù)期的不同地和/或以對(duì)駕駛員造成刺激的方式表現(xiàn)。這繼而可能導(dǎo)致駕駛員停用控制系統(tǒng),并且由此無(wú)法利用可由控制系統(tǒng)實(shí)現(xiàn)的益處。因此,重要的是開發(fā)使車輛如駕駛員所預(yù)期的那樣表現(xiàn)并且不承擔(dān)對(duì)駕駛員造成煩惱的風(fēng)險(xiǎn)的控制系統(tǒng)。
3、可以由車輛的駕駛員啟動(dòng)/停用并且由此取決于駕駛員使用控制系統(tǒng)的意愿的控制系統(tǒng)的一個(gè)具體實(shí)例是巡航控制系統(tǒng)。當(dāng)被啟動(dòng)時(shí),巡航控制系統(tǒng)例如避免了駕駛員操作加速踏板以便維持車輛速度的需要,并且由此改善駕駛員的舒適度。存在各種類型的巡航控制。它們配置成根據(jù)不同的控制功能操作,并且因此可能對(duì)例如車輛的操作產(chǎn)生不同的影響。
4、例如,恒速巡航控制旨在維持基本上恒定的車輛速度,諸如由車輛的駕駛員選擇的設(shè)定速度,并且因此通常配置成將車輛速度維持在關(guān)于設(shè)定速度的相對(duì)窄的可允許速度范圍內(nèi)。因此,恒速巡航控制以維持設(shè)定速度而不管車輛是正上坡、下坡還是在水平運(yùn)行表面上行駛為目的來(lái)控制車輛。這意味著車輛可加速越過(guò)山頂,僅在隨后下坡時(shí)立即制動(dòng)以避免超過(guò)設(shè)定速度。盡管這種巡航控制將使車輛如駕駛員所預(yù)期的那樣表現(xiàn),但這是不經(jīng)濟(jì)的運(yùn)行車輛方式,特別是在重型車輛的情況下,因?yàn)槠渫ǔ?赡苓^(guò)度增加車輛的能耗,并且因此增加操作成本(諸如燃料成本)。
5、另一種類型的巡航控制是前瞻巡航控制(有時(shí)也稱為預(yù)測(cè)巡航控制)。前瞻巡航控制是使用有關(guān)即將到來(lái)的路段(即,車輛前方的路段)的信息的巡航控制,并且可基于所述信息規(guī)劃即將到來(lái)的路段的車輛速度曲線。有關(guān)即將到來(lái)的路段的所述信息通常可以從地圖數(shù)據(jù)結(jié)合有關(guān)車輛的地理定位的信息導(dǎo)出,但是在一些情形下也可以從布置在車輛中或車輛上的傳感器導(dǎo)出和/或補(bǔ)充有例如與即將到來(lái)的路段有關(guān)的歷史數(shù)據(jù)。此后,當(dāng)車輛沿著所討論的路段行駛時(shí),前瞻巡航控制可以根據(jù)規(guī)劃的車輛速度曲線來(lái)控制車輛速度。與常規(guī)的恒速巡航控制器相比,前瞻巡航控制器的優(yōu)點(diǎn)在于能夠節(jié)省大量能源(諸如燃料)。例如,在即將到來(lái)的路段包括上坡隨后是下坡的情況下,如果車輛速度將在下坡期間增加以便達(dá)到設(shè)定速度,則可以將車輛加速到使得在山頂時(shí)具有低于設(shè)定速度的速度。為了利用可通過(guò)前瞻巡航控制獲得的積極效果,用于這種巡航控制的車輛的可允許速度范圍通常比恒速巡航控制的可允許速度范圍大得多。然而,當(dāng)使用前瞻巡航控制時(shí),車輛速度的變化有時(shí)可能被駕駛員視為干擾,在這種情況下,駕駛員可能選擇停用前瞻巡航控制。這繼而可能導(dǎo)致車輛的能耗增加,并且因此操作成本增加。
6、巡航控制的又一實(shí)例是自適應(yīng)巡航控制,其配置成自動(dòng)地調(diào)整車輛速度,以便與包括自適應(yīng)巡航控制的車輛前方的一個(gè)或多個(gè)車輛維持安全距離。自適應(yīng)巡航控制通常使用來(lái)自布置在車輛中或車輛上的傳感器(例如,雷達(dá)、激光器或相機(jī))的信息以便獲得有關(guān)車輛的周圍環(huán)境的信息。這里應(yīng)當(dāng)注意,如果期望,恒速巡航控制和前瞻巡航控制兩者都可以補(bǔ)充有自適應(yīng)巡航控制功能。
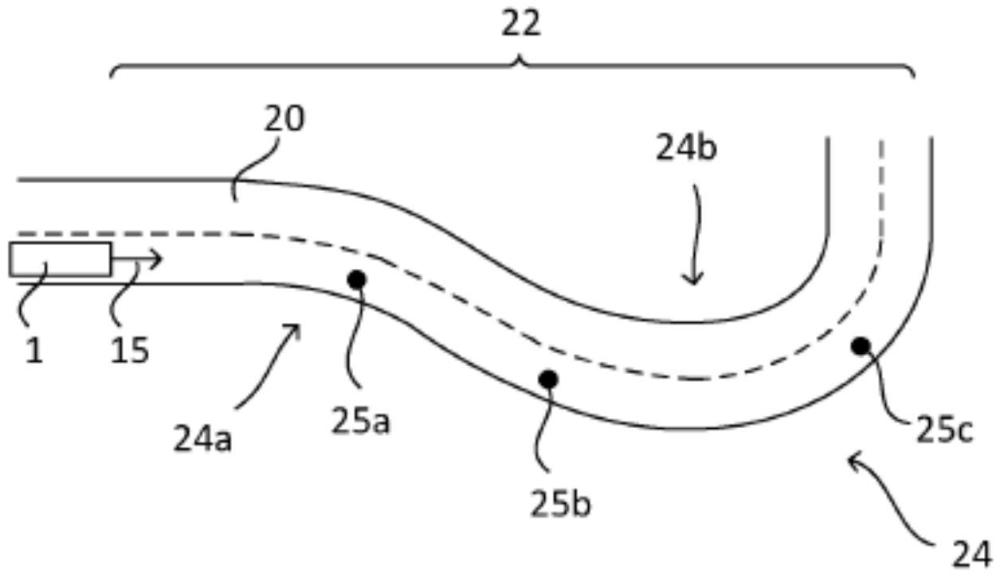
7、巡航控制系統(tǒng)大體上主要針對(duì)高速公路駕駛而開發(fā)。然而,期望能夠在鄉(xiāng)村道路上駕駛時(shí)也利用例如前瞻巡航控制的優(yōu)點(diǎn)。然而,與高速公路相比,此類道路可能包括需要考慮的各種附加的情形。例如,鄉(xiāng)村道路可能包括更急的彎道、交叉路口、環(huán)形交叉路口、停車標(biāo)志等,這可能需要對(duì)車輛速度進(jìn)行相當(dāng)大的調(diào)整。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明的目的在于實(shí)現(xiàn)一種用于降低車輛速度的改進(jìn)方法,所述方法允許車輛維持通過(guò)預(yù)期需要降低車輛速度的道路事件的安全的車輛速度,并且不依賴于由車輛的可能駕駛員采取的動(dòng)作。
2、所述目的通過(guò)所附獨(dú)立權(quán)利要求的主題來(lái)實(shí)現(xiàn)。
3、本公開提供了一種由控制裝置執(zhí)行的用于控制車輛的車輛速度的方法。所述方法包括以下步驟:確定包括預(yù)期需要降低車輛速度的事件的即將到來(lái)的路段的最大可允許車輛速度曲線。所述方法還包括以下步驟:基于確定的所述最大可允許車輛速度曲線,確定期望車輛速度曲線,以到達(dá)確定的最大可允許速度曲線的最低點(diǎn)同時(shí)避免車輛速度高于確定的所述最大可允許車輛速度曲線。所述期望車輛速度曲線設(shè)計(jì)成實(shí)現(xiàn)期望特性。所述方法還包括以下步驟:模擬在將根據(jù)第一制動(dòng)模式制動(dòng)所述車輛的情況下針對(duì)所述即將到來(lái)的路段的至少初始部分的車輛速度,由此獲得所述第一制動(dòng)模式的模擬車輛速度曲線。所述方法還包括以下步驟:當(dāng)所述第一制動(dòng)模式的獲得的所述模擬車輛速度曲線至少滿足取決于確定的所述期望車輛速度曲線的第一預(yù)定義標(biāo)準(zhǔn)時(shí),根據(jù)所述第一制動(dòng)模式制動(dòng)所述車輛。
4、本文中描述的方法使得當(dāng)車輛沿著包括與例如當(dāng)前車輛速度或當(dāng)前目標(biāo)車輛速度相比需要降低車輛速度的事件的路段行駛時(shí)能夠受控地降低車輛速度,而不損害車輛操作的安全性或車輛操作的期望特性,同時(shí)避免該路段的過(guò)度低的平均行駛速度。這繼而具有車輛如例如車輛的駕駛員或其他交通可預(yù)期那樣表現(xiàn)的優(yōu)點(diǎn)。
5、所述方法還可以包括以下步驟:模擬在將根據(jù)第二制動(dòng)模式制動(dòng)所述車輛的情況下針對(duì)所述即將到來(lái)的路段的至少所述初始部分的車輛速度,由此獲得所述第二制動(dòng)模式的模擬車輛速度曲線。所述步驟隨后可以是以下步驟:當(dāng)所述第一制動(dòng)模式的獲得的所述模擬車輛速度曲線不滿足所述第一預(yù)定義標(biāo)準(zhǔn)并且所述第二制動(dòng)模式的獲得的所述模擬車輛速度曲線至少滿足所述第一預(yù)定義標(biāo)準(zhǔn)時(shí),根據(jù)所述第二制動(dòng)模式制動(dòng)所述車輛。由此,即使所述第一制動(dòng)模式的所述模擬車輛速度曲線不滿足所述第一預(yù)定義標(biāo)準(zhǔn),也可以識(shí)別和利用合適的制動(dòng)模式。
6、第一預(yù)定義標(biāo)準(zhǔn)可以適當(dāng)?shù)厥牵瑢?duì)于限定的距離區(qū)間,所述期望車輛速度曲線的積分與所述模擬車輛速度曲線的積分之間的差小于預(yù)定義閾值,任選地結(jié)合所述差等于或高于零。所述距離區(qū)間由對(duì)應(yīng)于已針對(duì)其制作所述模擬車輛速度曲線的初始車輛位置的距離點(diǎn)和所述模擬車輛速度曲線與所述期望車輛速度曲線重合的距離點(diǎn)限定。借助于此第一預(yù)定義標(biāo)準(zhǔn),減少所述車輛在沿著所述路段行駛時(shí)的距離損失。
7、所述方法還可以包括以下步驟:基于第一制動(dòng)模式的獲得的所述模擬車輛速度曲線,確定直到所述模擬車輛速度曲線與所述期望車輛速度曲線重合的制動(dòng)持續(xù)時(shí)間。如果是這樣的話,則當(dāng)確定的所述持續(xù)時(shí)間等于或高于所述第一制動(dòng)模式的預(yù)定義最小可接受持續(xù)時(shí)間時(shí),可以執(zhí)行根據(jù)所述第一制動(dòng)模式制動(dòng)所述車輛的步驟。由此,可以避免用于制動(dòng)車輛的制動(dòng)模式需要在已啟動(dòng)之后不久改變,在已啟動(dòng)之后不久改變可能例如增加車輛的組成部件的磨損。當(dāng)制動(dòng)模式的改變可能涉及將離合器連接/斷開連接和/或執(zhí)行換擋、或甚至機(jī)械地將制動(dòng)系統(tǒng)連接/斷開連接時(shí),情況尤其如此。
8、所述方法還可以包括以下步驟:當(dāng)根據(jù)所述第一制動(dòng)模式制動(dòng)所述車輛時(shí)并且在所述車輛到達(dá)確定的所述最大可允許速度曲線的最低點(diǎn)之前,模擬在將根據(jù)第三制動(dòng)模式制動(dòng)所述車輛的情況下針對(duì)所述即將到來(lái)的路段的至少相鄰部分的車輛速度。由此,獲得所述第三制動(dòng)模式的模擬車輛速度曲線。所述方法接著可包括當(dāng)所述第三制動(dòng)模式的獲得的所述模擬車輛速度曲線至少滿足所述第一預(yù)定義標(biāo)準(zhǔn)時(shí),根據(jù)所述第三制動(dòng)模式制動(dòng)所述車輛。由此,所述車輛的制動(dòng)可以在車輛到達(dá)確定的最大可允許速度曲線的最低點(diǎn)之前改變?yōu)閷?duì)于(最初即將到來(lái)的)路段的一部分更合適的制動(dòng)模式,并且在適當(dāng)距離處改變。
9、根據(jù)本公開的方法可任選地還包括以下步驟:當(dāng)所述車輛(i)到達(dá)距確定的所述最大可允許速度曲線的最低點(diǎn)等于或小于預(yù)定距離的距離點(diǎn)時(shí),(ii)被估計(jì)將在預(yù)定義持續(xù)時(shí)間內(nèi)到達(dá)對(duì)應(yīng)于確定的所述最大可允許速度曲線的最低點(diǎn)的距離點(diǎn),和/或(iii)達(dá)到在確定的所述最大可允許速度曲線的最低點(diǎn)的預(yù)定可接受速度范圍內(nèi)的車輛速度時(shí),確定所述車輛是否可通過(guò)所述車輛通過(guò)滑行的制動(dòng)而在確定的最大可允許速度的所述最低點(diǎn)處達(dá)到等于或低于確定的所述最大可允許速度曲線的最低點(diǎn)的車輛速度的車輛速度。在確定所述車輛可通過(guò)所述車輛通過(guò)滑行的制動(dòng)而在確定的所述最大可允許速度曲線的最低點(diǎn)處達(dá)到等于或低于確定的所述最大可允許速度曲線的最低點(diǎn)的車輛速度的車輛速度的情況下,所述方法可包括啟動(dòng)通過(guò)滑行制動(dòng)所述車輛。由此,可以實(shí)現(xiàn)安全并且節(jié)能地將車輛速度降低到確定的最大可允許速度曲線的最低點(diǎn)。
10、如本文中描述的方法可以適當(dāng)?shù)夭⑷胲囕v的巡航控制中。由此,本文中描述的方法可例如配置成在即將到來(lái)的路段包括預(yù)期需要降低車輛速度的事件的情況下,暫時(shí)超控配置成基本上維持由車輛的駕駛員或另一控制系統(tǒng)選擇的設(shè)定速度的控制功能。由此,巡航控制可以在更大范圍的駕駛情形下使用,諸如,也在與高速公路駕駛相比包括更多可能需要改變車輛速度的事件的鄉(xiāng)村道路上駕駛時(shí)使用。此外,當(dāng)巡航控制包括本文中描述的方法時(shí),可以安全并且高效地操作車輛,而不會(huì)損害駕駛員的舒適度或以例如車輛的駕駛員或周圍交通非預(yù)期的方式表現(xiàn)。
11、上述預(yù)期需要降低車輛速度的事件可以例如包括道路的彎道、交叉路口、環(huán)形交叉路口和/或限速標(biāo)志,或者由它們組成。
12、所述方法還可以包括以下步驟:基于選自結(jié)合地圖數(shù)據(jù)或歷史數(shù)據(jù)的與所述車輛的地理位置有關(guān)的數(shù)據(jù)、從另一車輛和/或從基礎(chǔ)設(shè)施獲得的數(shù)據(jù)和/或從機(jī)載于所述車輛的一個(gè)或多個(gè)傳感器獲得的數(shù)據(jù)的數(shù)據(jù),確定所述車輛的即將到來(lái)的路段包括預(yù)期需要降低車輛速度的事件。
13、本公開還提供了一種包括指令的計(jì)算機(jī)程序,所述指令在由控制裝置執(zhí)行時(shí)使所述控制裝置執(zhí)行如上所述的方法。
14、本公開還提供了一種包括指令的計(jì)算機(jī)可讀介質(zhì),所述指令在由控制裝置執(zhí)行時(shí)使所述控制裝置執(zhí)行如上所述的方法。
15、此外,本公開提供了一種配置成控制車輛的車輛速度的控制裝置。所述控制裝置配置成確定包括預(yù)期需要降低車輛速度的事件的即將到來(lái)的路段的最大可允許車輛速度曲線。所述控制裝置還配置成基于確定的所述最大可允許車輛速度曲線,確定期望車輛速度曲線,以到達(dá)確定的最大可允許速度曲線的最低點(diǎn)同時(shí)避免車輛速度高于所述最大可允許車輛速度曲線,所述期望車輛速度曲線設(shè)計(jì)成實(shí)現(xiàn)期望特性。所述控制裝置還配置成模擬在將根據(jù)第一制動(dòng)模式制動(dòng)所述車輛的情況下針對(duì)所述即將到來(lái)的路段的至少初始部分的車輛速度,由此獲得所述第一制動(dòng)模式的模擬車輛速度曲線。此外,所述控制裝置配置成當(dāng)所述第一制動(dòng)模式的獲得的所述模擬車輛速度曲線至少滿足取決于確定的所述期望車輛速度曲線的第一預(yù)定義標(biāo)準(zhǔn)時(shí),根據(jù)所述第一制動(dòng)模式制動(dòng)所述車輛。
16、所述控制裝置提供了與上述關(guān)于用于控制車輛的車輛速度的對(duì)應(yīng)方法相同的優(yōu)點(diǎn)。
17、本公開還提供了一種配置成控制車輛的車輛速度的巡航控制系統(tǒng)。所述巡航控制系統(tǒng)包括如上所述的配置成控制車輛的車輛速度的控制裝置。
18、本公開還提供了一種車輛,所述車輛包括如上所述的配置成控制車輛的車輛速度的控制裝置。所述車輛可以是重型車輛,例如公共汽車或卡車,但不限于此。此外,所述車輛可以是由駕駛員部分或完全操作的車輛,或者是完全自動(dòng)駕駛車輛。此外,所述車輛可以由內(nèi)燃發(fā)動(dòng)機(jī)驅(qū)動(dòng),可以是混合動(dòng)力車輛,或者可以是全電動(dòng)車輛。
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!