一種潔凈車間搬運AGV行駛腳輪的清洗控制系統(tǒng)和檢測方法與流程
本發(fā)明涉及光伏電池車間自動化物流搬運領(lǐng)域,具體來說,涉及一種潔凈車間搬運agv行駛腳輪的清洗控制系統(tǒng)和檢測方法。
背景技術(shù):
1、由于目前光伏電池生產(chǎn)車間多采用agv自動搬運輸送上下料,agv搬運往返次數(shù)頻繁且都按規(guī)劃好的路徑行駛,因此如果agv小車行走輪粘上細小砂石及粉塵,會增加對地面的磨損,長此以往將會對地面造成較重的輪印以及磨損,影響車間的整潔及地面使用壽命;所以需要及時對agv行走輪進行清洗以保證輪子的清潔。而洗輪機就是針對agv行走輪清洗的專用設(shè)備,但是目前市面上現(xiàn)有的洗輪機只能對agv輪子進行清洗,但是不能對清洗的效果進行檢查,在清洗結(jié)束后無法確認輪子是否清洗干凈。
2、針對相關(guān)技術(shù)中的問題,目前尚未提出有效的解決方案。
技術(shù)實現(xiàn)思路
1、針對相關(guān)技術(shù)中的問題,本發(fā)明提出一種潔凈車間搬運agv行駛腳輪的清洗控制系統(tǒng)和檢測方法,以克服現(xiàn)有相關(guān)技術(shù)所存在的上述技術(shù)問題。
2、為此,本發(fā)明采用的具體技術(shù)方案如下:
3、一種潔凈車間搬運agv行駛腳輪的清洗控制系統(tǒng),包括洗輪控制系統(tǒng)、agv調(diào)度系統(tǒng)、視覺識別系統(tǒng)、洗輪機和agv;
4、所述洗輪控制系統(tǒng)檢測洗輪機當前狀態(tài),若為空閑狀態(tài),則agv直接駛?cè)胂摧啓C進行定位;
5、所述agv調(diào)度系統(tǒng)對agv搬運次數(shù)進行統(tǒng)計;
6、所述視覺識別系統(tǒng)根據(jù)清洗前后的輪子顏色匹配度判斷輪子清洗狀態(tài)。
7、根據(jù)本發(fā)明的另一個方面,提供了一種潔凈車間搬運agv行駛腳輪的清洗檢測方法,用于所述的潔凈車間搬運agv行駛腳輪的清洗控制系統(tǒng),包括以下步驟;
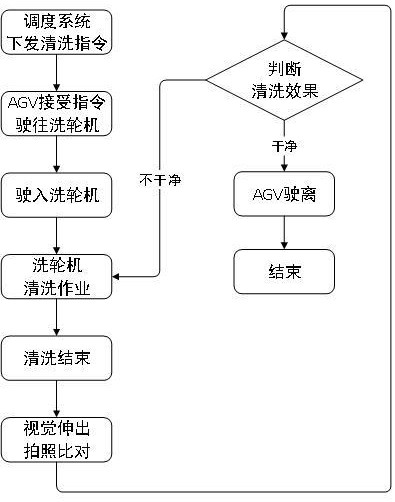
8、s1、agv調(diào)度系統(tǒng)通過對agv搬運次數(shù)的統(tǒng)計,篩選出需要進行輪子清洗的agv;
9、s2、調(diào)度系統(tǒng)對需要清洗輪子的agv下發(fā)洗輪的任務(wù)指令;
10、s3、指定編號的agv接收到洗輪指令后,自動行駛前往洗輪機進行輪子清洗;
11、s4、若洗輪機當前狀態(tài)為空閑狀態(tài),則agv直接駛?cè)胂摧啓C進行定位、固定、然后洗輪機對agv輪子進行清洗作業(yè);
12、s5、清洗作業(yè)結(jié)束后,視覺探頭移動至agv行走輪下方,對行走輪進行拍照比對;
13、s6、根據(jù)清洗前后的輪子顏色匹配度判斷輪子清洗狀態(tài),如果判斷結(jié)果為清洗干凈,則agv駛出洗輪機,加入搬運作業(yè)隊列。
14、作為優(yōu)選的,在步驟s4中,若洗輪機當前狀態(tài)為作業(yè)中狀態(tài),則agv駛往等候區(qū),待洗輪機完成上一個作業(yè)后,agv再駛?cè)胂摧啓C,然后洗輪機執(zhí)行對agv輪子進行清洗作業(yè)流程。
15、作為優(yōu)選的,在步驟s6中,如果判斷結(jié)果為未洗干凈,則洗輪機啟動對agv的重新清洗。
16、作為優(yōu)選的,所述視覺識別系統(tǒng)提前配置好比對底圖,在洗輪機對agv行走輪清洗完成后,視覺相機伸出到設(shè)定位置,對輪子進行拍照,然后將得到的照片與底圖進行匹配度比較。
17、作為優(yōu)選的,如果得到的照片與底圖進行匹配度比對結(jié)果色差偏差在設(shè)定值以內(nèi),則判定為清洗干凈并將結(jié)果反饋給洗輪機控制系統(tǒng),洗輪機收到反饋后將agv釋放,agv駛出洗輪機,完成本輪清洗作業(yè)。
18、作為優(yōu)選的,若比對結(jié)果偏差超出設(shè)定值,視覺系統(tǒng)則反饋未清洗干凈,洗輪機按照設(shè)定程序重新對agv進行輪子清洗,直至清洗干凈或達到設(shè)定的最大清洗次數(shù)報警提示結(jié)束。
19、本發(fā)明的有益效果為:通過加入視覺比對進行清洗效果判斷,能夠使洗輪機對agv輪子的清洗效果顯著提升,確保agv輪子清洗干凈,可以準確判斷輪子是否清洗干凈以及是否需要增加清洗時間。
技術(shù)特征:
1.一種潔凈車間搬運agv行駛腳輪的清洗控制系統(tǒng),其特征在于,包括洗輪控制系統(tǒng)、agv調(diào)度系統(tǒng)、視覺識別系統(tǒng)、洗輪機和agv;
2.一種潔凈車間搬運agv行駛腳輪的清洗檢測方法,其特征在于,用于權(quán)利要求1所述的潔凈車間搬運agv行駛腳輪的清洗控制系統(tǒng),包括以下步驟;
3.根據(jù)權(quán)利要求2所述的一種潔凈車間搬運agv行駛腳輪的清洗檢測方法,其特征在于,在步驟s4中,若洗輪機當前狀態(tài)為作業(yè)中狀態(tài),則agv駛往等候區(qū),待洗輪機完成上一個作業(yè)后,agv再駛?cè)胂摧啓C,然后洗輪機執(zhí)行對agv輪子進行清洗作業(yè)流程。
4.根據(jù)權(quán)利要求3所述的一種潔凈車間搬運agv行駛腳輪的清洗檢測方法,其特征在于,在步驟s6中,如果判斷結(jié)果為未洗干凈,則洗輪機啟動對agv的重新清洗。
5.根據(jù)權(quán)利要求4所述的一種潔凈車間搬運agv行駛腳輪的清洗檢測方法,其特征在于,所述視覺識別系統(tǒng)提前配置好比對底圖,在洗輪機對agv行走輪清洗完成后,視覺相機伸出到設(shè)定位置,對輪子進行拍照,然后將得到的照片與底圖進行匹配度比較。
6.根據(jù)權(quán)利要求5所述的一種潔凈車間搬運agv行駛腳輪的清洗檢測方法,其特征在于,如果得到的照片與底圖進行匹配度比對結(jié)果色差偏差在設(shè)定值以內(nèi),則判定為清洗干凈并將結(jié)果反饋給洗輪機控制系統(tǒng),洗輪機收到反饋后將agv釋放,agv駛出洗輪機,完成本輪清洗作業(yè)。
7.根據(jù)權(quán)利要求6所述的一種潔凈車間搬運agv行駛腳輪的清洗檢測方法,其特征在于,若比對結(jié)果偏差超出設(shè)定值,視覺系統(tǒng)則反饋未清洗干凈,洗輪機按照設(shè)定程序重新對agv進行輪子清洗,直至清洗干凈或達到設(shè)定的最大清洗次數(shù)報警提示結(jié)束。
技術(shù)總結(jié)
本發(fā)明公開了一種潔凈車間搬運AGV行駛腳輪的清洗控制系統(tǒng)和檢測方法,包括洗輪控制系統(tǒng)、AGV調(diào)度系統(tǒng)、視覺識別系統(tǒng)、洗輪機和AGV;所述洗輪控制系統(tǒng)檢測洗輪機當前狀態(tài),若為空閑狀態(tài),則AGV直接駛?cè)胂摧啓C進行定位;所述AGV調(diào)度系統(tǒng)對AGV搬運次數(shù)進行統(tǒng)計;所述視覺識別系統(tǒng)根據(jù)清洗前后的輪子顏色匹配度判斷輪子清洗狀態(tài)。通過加入視覺比對進行清洗效果判斷,能夠使洗輪機對AGV輪子的清洗效果顯著提升,確保AGV輪子清洗干凈,可以準確判斷輪子是否清洗干凈以及是否需要增加清洗時間。
技術(shù)研發(fā)人員:許振東,雷鳳武,唐敢然
受保護的技術(shù)使用者:湖南艾博特機器人技術(shù)有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!