一種自動駕駛BEV安全行駛空間構建方法
本發明涉及汽車自動駕駛,特別是關于一種自動駕駛bev(bird-eyeview,bev,鳥瞰圖視角)安全行駛空間構建方法。
背景技術:
1、隨著輔助駕駛功能已逐步實現量產,高級別自動駕駛成為現階段研究和工程實踐的熱點。
2、高級別自動駕駛汽車需要通過環境感知系統來獲取周圍的車輛、行人等道路環境信息,進而自主地做出駕駛決策。由此可見,環境感知結果的準確性對自動駕駛安全具有重要意義。然而,天氣、光照等外界環境因素會影響傳感器數據的質量,感知算法也不可能實現完美無誤的目標檢測,其可能引發自動駕駛事故,對安全性造成威脅。
3、從自動駕駛感知、預測、決策、控制的鏈條來看,決策層需要具備容忍感知及預測不確定性的能力,即對感知及預測不確定性所造成的風險進行認知,并做出安全的駕駛決策。
4、研究發現,現有研究多集中在容忍預測不確定性的駕駛決策上,一些研究通過預測周圍車輛、行人等目標未來一段時間內可能達到的區域,自車決策時避開這些區域以保障安全;一些研究則通過強化學習進行駕駛決策,通過狀態轉移概率來建模周圍目標未來可能的狀態。上述方法均是在假定環境感知結果完全準確的基礎上,考慮目標未來行為的不確定性,而當感知結果存在較大不確定性時,并不足以保障駕駛安全。
技術實現思路
1、針對上述問題,本發明的目的是提供一種自動駕駛bev安全行駛空間構建方法,基于實時感知結果及其不確定性實現環境風險評估,進而劃定自適應安全裕量,構建bev視角下的邊界式安全行駛空間,實現自車周圍環境風險的認知,提升自動駕駛的安全性。
2、為實現上述目的,本發明采取以下技術方案:
3、第一方面,本申請提供一種自動駕駛bev安全行駛空間構建方法,所述方法,包括:
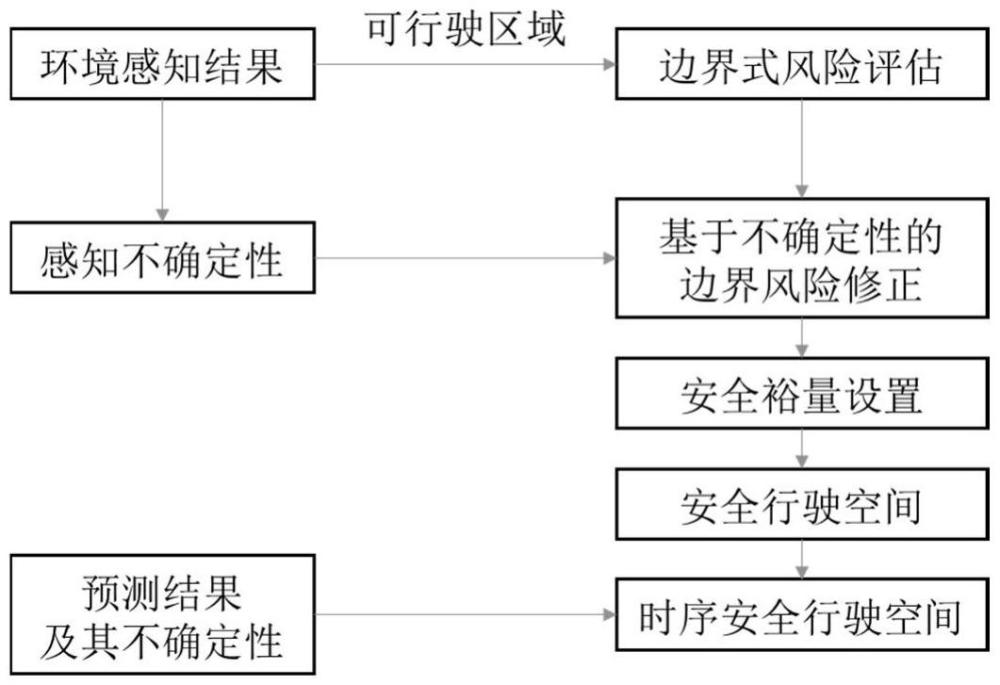
4、s1,獲取汽車對環境的環境目標感知信息,識別汽車的可行駛邊界,并根據環境目標信息進行可行駛邊界上的邊界式風險評估;
5、s2,根據環境目標感知信息中的感知不確定性,對邊界式風險評估的風險評估結果進行修正,得到修正后的風險評估結果;
6、s3,根據所述感知不確定性和修正后的風險評估結果,劃定自適應安全裕量,并根據自適應安全雨量,構建汽車可安全行駛的安全行駛空間。
7、在一種實現方式中,所述s1中,所述環境目標感知信息,包括所述汽車的環境感知傳感器檢測到的動靜態環境目標的空間位置、語義類別和運動狀態。
8、在一種實現方式中,所述s1中,采用微元法進行邊界時風險評估,所述汽車的可行駛邊界上的每一段微元的總風險由空間風險和運動風險加權疊加,其公式為:
9、ri=poiroi+pdirdi
10、式中,ri為第i個微元的總風險,poi和pdi分別為空間風險和運動風險的權重,roi和rdi分別為空間風險和運動風險。
11、在一種實現方式中,在以自車為中心的極坐標系下,空間風險計算公式為:
12、
13、式中,ci代表微元的語義類別,m(ci)為語義類別的風險權重;ri為微元對應的極徑ri的長度;x1為空間風險冪指數,設置為負值。
14、在一種實現方式中,在以自車為中心的極坐標系下,運動風險計算公式為:
15、
16、式中m(ci)代表語義類別的風險權重,(vi·ni)代表速度的徑向分量vri,其中速度可以為絕對速度或相對速度;x2和x3分別為速度與極徑的冪指數。
17、在一種實現方式中,環境目標感知信息中的感知不確定性,包括:檢測到的環境目標的目標存在概率、目標語義類別不確定性、和目標運動速度的不確定性;
18、分別依次根據上述不確定性,對汽車的可行駛邊界上的每一段微元的總風險進行修正。
19、在一種實現方式中,對汽車的可行駛邊界上的每一段微元的總風險進行修正,計算過程包括:
20、r′j=rj·p(e)
21、式中,rj代表微元法得到的邊界段的風險,r′j代表根據目標存在概率進行修正后的邊界段風險的修正值,p(e)為目標存在概率;
22、
23、式中,r″j為考慮目標語義類別不確定性后,邊界段風險的修正值;
24、
25、式中,r″′j為考慮目標運動速度不確定性后,邊界段風險的修正值。
26、在一種實現方式中,所述s3中,安全裕量與邊界風險的大小、目標空間信息不確定性相關。
27、在一種實現方式中,所述方法,還包括:
28、s4,獲取對安全行駛空間的預測結果,結合預測結果和已經構建的安全行駛空間,形成時序化的安全行駛空間。
29、第二方面,還提供一種計算機可讀存儲介質,存儲有計算機程序,所述計算機程序被處理器執行,實現第一方面所述的自動駕駛bev安全行駛空間構建方法。
30、本發明由于采取以上技術方案,其具有以下優點:一種基于感知不確定性的自動駕駛bev安全行駛空間構建方法。首先,針對車輛、行人、道路邊界等動靜態環境目標,考慮其空間位置、語義類別、運動狀態信息,以可行駛區域邊界為基礎,在不考慮感知不確定性的情況下,分析環境風險沿可行駛區域邊界的分布;其次,根據目標存在概率、語義類別不確定性、運動狀態不確定性,對邊界風險進行修正;再次,根據目標空間位置不確定性,及修正后的邊界風險,劃定自適應的安全裕量,構建邊界式安全行駛空間;最后,結合目標未來狀態的預測,形成時序的安全行駛空間,為自動駕駛決策提供時空約束,提升自動駕駛的安全性。
技術特征:
1.一種自動駕駛bev安全行駛空間構建方法,其特征在于,所述方法,包括:
2.根據權利要求1所述的自動駕駛bev安全行駛空間構建方法,其特征在于,所述s1中,所述環境目標感知信息,包括所述汽車的環境感知傳感器檢測到的動靜態環境目標的空間位置、語義類別和運動狀態。
3.根據權利要求2所述的自動駕駛bev安全行駛空間構建方法,其特征在于,所述s1中,采用微元法進行邊界式風險評估,所述汽車的可行駛邊界上的每一段微元的總風險由空間風險和運動風險加權疊加,其公式為:
4.根據權利要求3所述的自動駕駛bev安全行駛空間構建方法,其特征在于,在以自車為中心的極坐標系下,空間風險計算公式為:
5.根據權利要求3所述的自動駕駛bev安全行駛空間構建方法,其特征在于,在以自車為中心的極坐標系下,運動風險計算公式為:
6.根據權利要求1所述的自動駕駛bev安全行駛空間構建方法,其特征在于,環境目標感知信息中的感知不確定性,包括:檢測到的環境目標的目標存在概率、目標語義類別不確定性、和目標運動速度的不確定性;
7.根據權利要求6所述的自動駕駛bev安全行駛空間構建方法,其特征在于,對汽車的可行駛邊界上的每一段微元的總風險進行修正,計算過程包括:
8.根據權利要求7所述的自動駕駛bev安全行駛空間構建方法,其特征在于,所述s3中,安全裕量與邊界風險的大小、目標空間信息不確定性相關。
9.根據權利要求1所述的自動駕駛bev安全行駛空間構建方法,其特征在于,所述方法,還包括:
10.一種計算機可讀存儲介質,其特征在于,存儲有計算機程序,所述計算機程序被處理器執行,實現權利要求1至9任一項所述的自動駕駛bev安全行駛空間構建方法。
技術總結
本發明涉及一種自動駕駛BEV安全行駛空間構建方法,所述方法,包括:S1,獲取汽車對環境的環境目標感知信息,識別汽車的可行駛邊界,并根據環境目標信息進行可行駛邊界上的邊界式風險評估;S2,根據環境目標感知信息中的感知不確定性,對邊界式風險評估的風險評估結果進行修正,得到修正后的風險評估結果;S3,根據所述感知不確定性和修正后的風險評估結果,劃定自適應安全裕量,并根據自適應安全雨量,構建汽車可安全行駛的安全行駛空間。
技術研發人員:焦新宇,楊殿閣,江昆,楊蒙蒙,楊明亮,程前
受保護的技術使用者:清華大學
技術研發日:
技術公布日:2025/3/20
- 還沒有人留言評論。精彩留言會獲得點贊!