一種倒車影像控制方法及系統(tǒng)、車輛與流程
本發(fā)明涉及車輛控制,尤其涉及一種倒車影像控制方法及系統(tǒng)、車輛。
背景技術(shù):
1、全景式監(jiān)控?cái)z像系統(tǒng)(avm,around?view?monitor)是一種能夠?qū)崿F(xiàn)360度無死角監(jiān)控的先進(jìn)技術(shù),它通過集成高分辨率攝像頭、圖像處理算法、網(wǎng)絡(luò)傳輸技術(shù)和智能分析系統(tǒng),實(shí)時(shí)捕捉、傳輸和分析監(jiān)控區(qū)域內(nèi)的所有動(dòng)態(tài)信息。
2、現(xiàn)有的中控車機(jī)(即汽車中控)在實(shí)現(xiàn)全景式監(jiān)控?cái)z像系統(tǒng)的功能時(shí),多基于安卓開發(fā)。這些功能大多數(shù)采用的是通過應(yīng)用層(應(yīng)用層也稱為應(yīng)用實(shí)體,它由若干個(gè)特定應(yīng)用服務(wù)元素和一個(gè)或多個(gè)公用應(yīng)用服務(wù)元素組成)來實(shí)現(xiàn),由于在安卓系統(tǒng)中啟動(dòng)應(yīng)用需要經(jīng)過系統(tǒng)多個(gè)進(jìn)程服務(wù),且每次應(yīng)用啟動(dòng)后都需要重新打開攝像頭、設(shè)置參數(shù)、獲取圖像并利用算法進(jìn)行處理,導(dǎo)致每次響應(yīng)時(shí)具有一定的延遲,延遲顯示給用戶帶來非常不好的體驗(yàn),影像司機(jī)正常倒車。同時(shí),基于應(yīng)用層來實(shí)現(xiàn)全景式監(jiān)控?cái)z像系統(tǒng)的功能時(shí),需要占用一定的系統(tǒng)內(nèi)存。
3、特別是車輛剛啟動(dòng)時(shí),很多場景下,車輛開啟需要立即倒車。而中控車機(jī)啟動(dòng)較慢,很有可能還未完全完成開啟,等到中控車機(jī)啟動(dòng)后再啟動(dòng)相應(yīng)的應(yīng)用層,此時(shí)的延遲顯示會(huì)更明顯。
技術(shù)實(shí)現(xiàn)思路
1、鑒于以上現(xiàn)有技術(shù)的缺陷,本發(fā)明提供一種倒車影像控制方法及系統(tǒng)、車輛,以解決倒車影像的開啟延時(shí)以及內(nèi)存占用的技術(shù)問題。
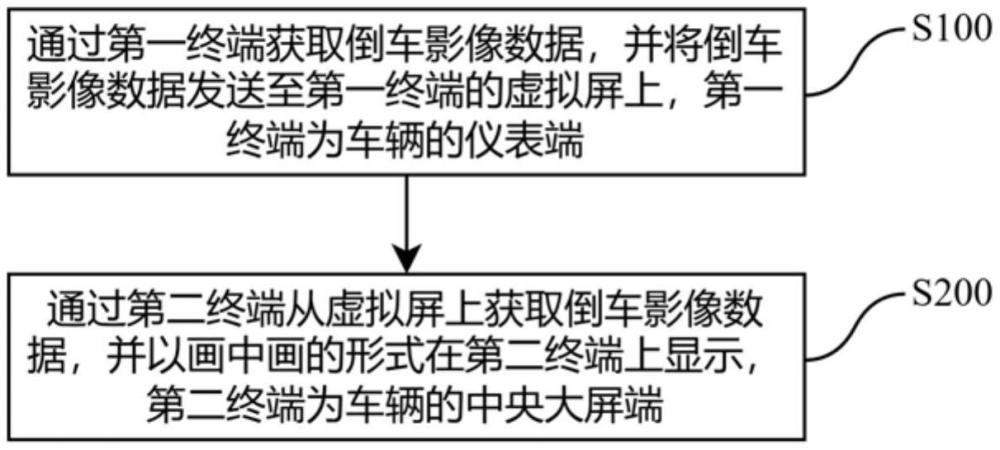
2、為實(shí)現(xiàn)上述目的及其它相關(guān)目的,本發(fā)明提供了一種倒車影像控制方法,包括:通過第一終端獲取倒車影像數(shù)據(jù),并將所述倒車影像數(shù)據(jù)發(fā)送至所述第一終端的虛擬屏上,所述第一終端為車輛的儀表端;通過第二終端從所述虛擬屏上獲取所述倒車影像數(shù)據(jù),并以畫中畫的形式在所述第二終端上顯示,所述第二終端為車輛的中央大屏端。
3、于本發(fā)明一實(shí)施例中,通過第一終端獲取倒車影像數(shù)據(jù),并將所述倒車影像數(shù)據(jù)發(fā)送至所述第一終端的虛擬屏上,包括:當(dāng)車輛掛倒車擋時(shí),通過所述第一終端獲取所述倒車影像數(shù)據(jù);將所述倒車影像數(shù)據(jù)發(fā)送至所述第一終端的虛擬屏上;修改標(biāo)志位,以表征倒車影像功能已開啟。
4、于本發(fā)明一實(shí)施例中,通過第二終端從所述虛擬屏上獲取所述倒車影像數(shù)據(jù),并以畫中畫的形式在所述第二終端上顯示,包括:通過所述第二終端從所述第一終端獲取所述標(biāo)志位,并根據(jù)所述標(biāo)志位判斷倒車影像功能是否開啟:如果是,從所述虛擬屏上獲取所述倒車影像數(shù)據(jù),并以畫中畫的形式在所述第二終端上顯示;如果否,不從所述虛擬屏上獲取所述倒車影像數(shù)據(jù)。
5、于本發(fā)明一實(shí)施例中,通過所述第二終端從所述虛擬屏上獲取所述倒車影像數(shù)據(jù),并以畫中畫的形式在所述第二終端上顯示,包括:通過所述第二終端從所述第一終端獲取窗口坐標(biāo)信息;根據(jù)所述窗口坐標(biāo)信息,在所述第二終端上創(chuàng)建所述窗口;從所述虛擬屏上獲取所述倒車影像數(shù)據(jù),并在所述窗口中顯示。
6、于本發(fā)明一實(shí)施例中,通過所述第二終端從所述第一終端獲取窗口坐標(biāo)信息,包括:通過所述第二終端從所述第一終端獲取窗口的左上角的x軸坐標(biāo)和y軸坐標(biāo)、寬度和高度。
7、于本發(fā)明一實(shí)施例中,根據(jù)所述窗口坐標(biāo)信息,在所述第二終端上創(chuàng)建所述窗口的步驟之后還包括:屏蔽所述窗口區(qū)域內(nèi)的觸碰事件;將所述窗口的層級調(diào)至最高。
8、于本發(fā)明一實(shí)施例中,將所述窗口的層級調(diào)至最高,包括:將所述窗口的層級設(shè)置為最高;重新整理所述第二終端上所有窗口的層級順序;請求下一次屏幕刷新信號,用于合成調(diào)整層級順序后的窗口內(nèi)容。
9、為實(shí)現(xiàn)上述目的及其它相關(guān)目的,本發(fā)明還提供了一種倒車影像控制系統(tǒng),包括:第一終端,用于獲取倒車影像數(shù)據(jù),并將所述倒車影像數(shù)據(jù)發(fā)送至所述第一終端的虛擬屏上,所述第一終端為車輛的儀表端;第二終端,用于從所述虛擬屏上獲取所述倒車影像數(shù)據(jù),并以畫中畫的形式在所述第二終端上顯示,所述第二終端為車輛的中央大屏端。
10、于本發(fā)明一實(shí)施例中,所述第一終端的操作系統(tǒng)為qnx操作系統(tǒng),所述第二終端的操作系統(tǒng)為安卓或鴻蒙或ios操作系統(tǒng)。
11、為實(shí)現(xiàn)上述目的及其它相關(guān)目的,本發(fā)明還提供了一種車輛,包括上述倒車影像控制系統(tǒng)。
12、本發(fā)明的有益效果:本發(fā)明提出的一種倒車影像控制方法及系統(tǒng)、車輛,該方法通過在第一終端先獲取倒車影像數(shù)據(jù)并發(fā)送到虛擬屏上,一旦第二終端完成開啟后,可以直接從虛擬屏上獲取倒車影像數(shù)據(jù),這個(gè)數(shù)據(jù)是已經(jīng)經(jīng)過處理、可直接顯示的,因此響應(yīng)速度會(huì)快很多;同時(shí),在第二終端上以畫中畫的形式顯示,避免了用應(yīng)用的方式占用內(nèi)存,也避免了啟動(dòng)應(yīng)用所消耗的時(shí)間,且畫中畫的形式不會(huì)完全的遮蔽掉中控大屏,讓倒車影像開啟時(shí)也能進(jìn)行其他功能的觸摸操作。
技術(shù)特征:
1.一種倒車影像控制方法,其特征在于,包括:
2.根據(jù)權(quán)利要求1所述的倒車影像控制方法,其特征在于,通過第一終端獲取倒車影像數(shù)據(jù),并將所述倒車影像數(shù)據(jù)發(fā)送至所述第一終端的虛擬屏上,包括:
3.根據(jù)權(quán)利要求2所述的倒車影像控制方法,其特征在于,通過第二終端從所述虛擬屏上獲取所述倒車影像數(shù)據(jù),并以畫中畫的形式在所述第二終端上顯示,包括:
4.根據(jù)權(quán)利要求1所述的倒車影像控制方法,其特征在于,通過所述第二終端從所述虛擬屏上獲取所述倒車影像數(shù)據(jù),并以畫中畫的形式在所述第二終端上顯示,包括:
5.根據(jù)權(quán)利要求4所述的倒車影像控制方法,其特征在于,通過所述第二終端從所述第一終端獲取窗口坐標(biāo)信息,包括:
6.根據(jù)權(quán)利要求4所述的倒車影像控制方法,其特征在于,根據(jù)所述窗口坐標(biāo)信息,在所述第二終端上創(chuàng)建所述窗口的步驟之后還包括:
7.根據(jù)權(quán)利要求6所述的倒車影像控制方法,其特征在于,將所述窗口的層級調(diào)至最高,包括:
8.一種倒車影像控制系統(tǒng),其特征在于,包括:
9.根據(jù)權(quán)利要求8所述的倒車影像控制系統(tǒng),其特征在于,所述第一終端的操作系統(tǒng)為qnx操作系統(tǒng),所述第二終端的操作系統(tǒng)為安卓或鴻蒙或ios操作系統(tǒng)。
10.一種車輛,其特征在于,包括如權(quán)利要求8所述的倒車影像控制系統(tǒng)。
技術(shù)總結(jié)
本發(fā)明提供一種倒車影像控制方法及系統(tǒng)、車輛,該方法包括:通過第一終端獲取倒車影像數(shù)據(jù),并將倒車影像數(shù)據(jù)發(fā)送至第一終端的虛擬屏上,第一終端為車輛的儀表端;通過第二終端從虛擬屏上獲取倒車影像數(shù)據(jù),并以畫中畫的形式在第二終端上顯示,第二終端為車輛的中央大屏端。該方法通過第一終端獲取倒車影像數(shù)據(jù)并發(fā)送到虛擬屏上,至第二終端完成開啟后,可以直接從虛擬屏上獲取倒車影像數(shù)據(jù),該數(shù)據(jù)是已經(jīng)經(jīng)過處理、可直接顯示的,因此響應(yīng)速度會(huì)快很多;同時(shí),在第二終端上以畫中畫的形式顯示,避免了用應(yīng)用的方式占用內(nèi)存,也避免了啟動(dòng)應(yīng)用所消耗的時(shí)間,畫中畫的形式不會(huì)完全的遮蔽掉中控大屏,讓倒車影像開啟時(shí)也能進(jìn)行其他功能的觸摸操作。
技術(shù)研發(fā)人員:鄒元飛
受保護(hù)的技術(shù)使用者:智馬達(dá)(浙江)軟件科技有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒有人留言評論。精彩留言會(huì)獲得點(diǎn)贊!