車輛控制方法、裝置、控制設(shè)備及存儲介質(zhì)與流程
本申請涉及智能駕駛,尤其涉及一種車輛控制方法、裝置、控制設(shè)備及存儲介質(zhì)。
背景技術(shù):
1、目前,車輛的自動緊急制動系統(tǒng)(advanced?emergency?braking?system,aeb)主要依賴傳感器來檢測前方障礙物的距離和速度,是一種車輛在行駛過程中經(jīng)過感知分析具有碰撞風險時進行自動緊急制動的一種主動安全技術(shù)。在平坦路面上,這些傳感器的測量結(jié)果較為準確,但在具有坡度的路面上,由于地形傾斜的影響,傳感器的測量結(jié)果會出現(xiàn)偏差,導(dǎo)致aeb系統(tǒng)的誤判。
2、相關(guān)技術(shù)中,通常依賴于傳感器的測量數(shù)據(jù),無法有效解決坡度帶來的誤差問題。
技術(shù)實現(xiàn)思路
1、本申請實施例提供一種車輛控制方法、裝置、控制設(shè)備及存儲介質(zhì),有效解決坡度帶來的誤差問題,提高在具有坡度的路面上車輛控制的準確性和可靠性,以至少部分的解決上述技術(shù)問題。
2、為了實現(xiàn)上述目的,根據(jù)本申請的第一方面,提供一種車輛控制方法,所述方法包括:
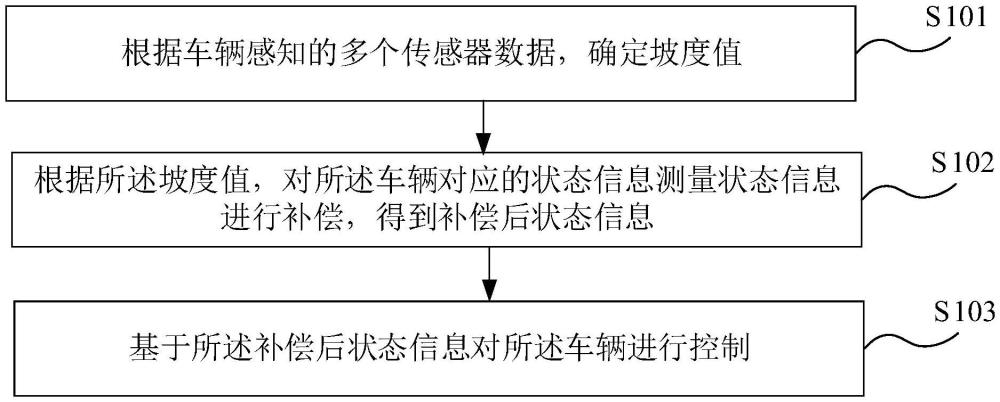
3、根據(jù)車輛感知的多個傳感器數(shù)據(jù),確定坡度值;
4、根據(jù)所述坡度值,對所述車輛對應(yīng)的測量狀態(tài)信息進行補償,得到補償后狀態(tài)信息;
5、基于所述補償后狀態(tài)信息對所述車輛進行控制。
6、根據(jù)本申請的第二方面,提供一種車輛控制裝置,所述裝置包括:
7、確定模塊,用于根據(jù)車輛感知的多個傳感器數(shù)據(jù),確定坡度值;
8、補償模塊,用于根據(jù)所述坡度值,對所述車輛對應(yīng)的測量狀態(tài)信息進行補償,得到補償后狀態(tài)信息;
9、控制模塊,用于基于所述補償后狀態(tài)信息對所述車輛進行控制。
10、根據(jù)本申請的第三方面,提供一種計算機可讀存儲介質(zhì),其上存儲有計算機程序,所述計算機程序被處理器執(zhí)行時實現(xiàn)上述車輛控制方法。
11、根據(jù)本申請的第四方面,提供一種計算機程序產(chǎn)品,包括計算機程序,所述計算機程序被處理器執(zhí)行時實現(xiàn)上述車輛控制方法。
12、根據(jù)本申請的第五方面,提供一種控制設(shè)備,包括:存儲器,其上存儲有計算機程序;處理器,用于執(zhí)行所述存儲器中的所述計算機程序,以實現(xiàn)上述車輛控制方法。
13、根據(jù)本申請的第六方面,提供一種車輛,包括上述控制設(shè)備。
14、本申請實施例的車輛控制方法、裝置、存儲介質(zhì)、程序產(chǎn)品及車輛,通過根據(jù)車輛感知的多個傳感器數(shù)據(jù),確定坡度值;根據(jù)坡度值,對車輛對應(yīng)的測量狀態(tài)信息進行補償,得到補償后狀態(tài)信息;基于補償后狀態(tài)信息對車輛進行控制。由于是通過多維度的傳感器數(shù)據(jù)確定坡度值,提高了坡度值的精度,通過較高精度的坡度值進行車輛對應(yīng)的測量狀態(tài)信息的補償,減少了坡度對車輛對應(yīng)的測量狀態(tài)信息的影響,提高了車輛控制準確性和可靠性。
15、本申請的其他特征和優(yōu)點將在隨后的具體實施方式部分予以詳細說明。
技術(shù)特征:
1.一種車輛控制方法,其特征在于,所述方法包括:
2.根據(jù)權(quán)利要求1所述的方法,其特征在于,所述傳感器數(shù)據(jù)包括慣性測量傳感器采集的慣性檢測數(shù)據(jù)、雷達傳感器采集的雷達檢測數(shù)據(jù)和視覺傳感器采集的視覺檢測數(shù)據(jù)中的至少一種。
3.根據(jù)權(quán)利要求2所述的方法,其特征在于,所述根據(jù)車輛感知的多個傳感器數(shù)據(jù),確定坡度值,包括:
4.根據(jù)權(quán)利要求3所述的方法,其特征在于,對于所述慣性檢測數(shù)據(jù)和所述雷達檢測數(shù)據(jù),所述數(shù)據(jù)處理包括濾波處理,對于所述視覺檢測數(shù)據(jù),所述數(shù)據(jù)處理包括圖像預(yù)處理。
5.根據(jù)權(quán)利要求4所述的方法,其特征在于,對于所述慣性檢測數(shù)據(jù),所述數(shù)據(jù)處理還包括基于實時動態(tài)數(shù)據(jù)對所述慣性檢測數(shù)據(jù)進行的補償處理。
6.根據(jù)權(quán)利要求5所述的方法,其特征在于,所述實時動態(tài)數(shù)據(jù)的確定步驟,包括:
7.根據(jù)權(quán)利要求5所述的方法,其特征在于,所述基于實時動態(tài)數(shù)據(jù)對所述慣性檢測數(shù)據(jù)進行的補償處理的步驟在所述濾波處理的步驟之后。
8.根據(jù)權(quán)利要求7所述的方法,其特征在于,基于所述實時動態(tài)數(shù)據(jù)對濾波處理后的慣性檢測數(shù)據(jù)進行補償處理的步驟,包括:
9.根據(jù)權(quán)利要求8所述的方法,其特征在于,所述基于所述實時動態(tài)數(shù)據(jù)進行坐標系轉(zhuǎn)換,得到所述車輛對應(yīng)的自車坐標系下的位置數(shù)據(jù),包括:
10.根據(jù)權(quán)利要求9所述的方法,其特征在于,所述將所述實時動態(tài)數(shù)據(jù)從所在的大地坐標系,轉(zhuǎn)換至所述車輛對應(yīng)的自車坐標系,得到所述自車坐標系下的位置數(shù)據(jù),包括:
11.根據(jù)權(quán)利要求3所述的方法,其特征在于,所述基于所述處理后傳感器數(shù)據(jù),確定坡度值,包括:
12.根據(jù)權(quán)利要求1-11任一項所述的方法,其特征在于,所述根據(jù)所述坡度值,對所述車輛對應(yīng)的測量狀態(tài)信息進行補償,得到補償后狀態(tài)信息,包括:
13.根據(jù)權(quán)利要求12所述的方法,其特征在于,所述測量狀態(tài)信息包括通過所述雷達傳感器和/或所述視覺傳感器的感知數(shù)據(jù)得到的測量狀態(tài)信息。
14.根據(jù)權(quán)利要求13所述的方法,其特征在于,所述測量狀態(tài)信息包括測量速度和/或測量距離。
15.根據(jù)權(quán)利要求14所述的方法,其特征在于,所述根據(jù)所述補償系數(shù)對所述測量狀態(tài)信息進行補償,得到所述補償后狀態(tài)信息,包括:
16.根據(jù)權(quán)利要求15所述的方法,其特征在于,所述根據(jù)各所述補償后狀態(tài)數(shù)據(jù),確定所述補償后狀態(tài)信息,包括:
17.根據(jù)權(quán)利要求14所述的方法,其特征在于,所述測量距離對應(yīng)的補償后狀態(tài)信息包括第一方向距離、第二方向距離和第三方向距離,所述補償系數(shù)包括所述第一方向距離對應(yīng)的第一補償系數(shù)、所述第二方向距離對應(yīng)的第二補償系數(shù)和所述第三方向距離對應(yīng)的第三補償系數(shù);
18.根據(jù)權(quán)利要求1-11任意一項所述的方法,其特征在于,所述基于所述補償后狀態(tài)信息對所述車輛進行控制,包括:
19.根據(jù)權(quán)利要求1-11任意一項所述的方法,其特征在于,還包括:
20.一種車輛控制裝置,其特征在于,所述裝置包括:
21.一種計算機可讀存儲介質(zhì),其上存儲有計算機程序,其特征在于,所述計算機程序被處理器執(zhí)行時實現(xiàn)權(quán)利要求1至19中任意一項所述的車輛控制方法。
22.一種計算機程序產(chǎn)品,包括計算機程序,其特征在于,所述計算機程序被處理器執(zhí)行時實現(xiàn)權(quán)利要求1至19中任意一項所述的車輛控制方法。
23.一種控制設(shè)備,其特征在于,包括:
24.一種車輛,其特征在于,包括如權(quán)利要求23所述的控制設(shè)備。
技術(shù)總結(jié)
本申請涉及一種車輛控制方法、裝置、控制設(shè)備及存儲介質(zhì),其中所述方法包括:根據(jù)車輛感知的多個傳感器數(shù)據(jù),確定坡度值;根據(jù)坡度值,對車輛對應(yīng)的測量狀態(tài)信息進行補償,得到補償后狀態(tài)信息;基于補償后狀態(tài)信息對車輛進行控制。由于是通過多維度的傳感器數(shù)據(jù)確定坡度值,提高了坡度值的精度,通過較高精度的坡度值進行車輛對應(yīng)的測量狀態(tài)信息的補償,減少了坡度對車輛對應(yīng)的測量狀態(tài)信息的影響,提高了車輛控制準確性和可靠性。
技術(shù)研發(fā)人員:金欣,段元甫,趙竣威,崔宏斌,杜鵬
受保護的技術(shù)使用者:比亞迪股份有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!