自動泊車方法、裝置、電子設(shè)備及目標車輛與流程
本發(fā)明涉及自動泊車,具體涉及自動泊車方法、裝置、電子設(shè)備及目標車輛。
背景技術(shù):
1、隨著汽車保有量的持續(xù)增長,停車難問題日益凸顯,成為城市交通中的一大困擾。在日常停車場景中,駕駛員常常遭遇諸多棘手狀況。
2、一方面,在進入停車場后,面對看似有空余的車位,僅憑肉眼目測,很難精準判斷車位實際尺寸是否與車輛適配,以及周邊空間能否滿足停車及后續(xù)下車需求。即使是經(jīng)驗豐富的駕駛員,也可能因車位狹窄、周圍障礙物布局復(fù)雜,在泊車過程中需要施展高超的駕駛技巧,反復(fù)調(diào)整車身姿態(tài),耗費大量時間與精力,且稍有不慎就容易發(fā)生刮蹭碰撞事故,造成車輛損傷。例如,一些老舊小區(qū)的停車場,車位規(guī)劃缺乏規(guī)范,車位狹小且通道狹窄,車輛間距極小,停車難度極高;又如商業(yè)中心的地下停車場,高峰時段車流量大,車位緊張,為爭搶有限車位,駕駛員往往匆忙停車,無暇顧及停車質(zhì)量,導(dǎo)致后續(xù)下車不便甚至無法開門下車。
3、另一方面,當駕駛員千辛萬苦完成停車后,卻可能發(fā)現(xiàn)更理想的車位。此時,若想更換車位,駕駛員需重新擠入車內(nèi),在有限空間內(nèi)艱難完成倒車出庫操作,再駛向新車位泊入,整個過程不僅操作繁瑣,還容易在頻繁啟停、轉(zhuǎn)向過程中引發(fā)與周圍車輛的擦碰風險,進一步加劇停車場內(nèi)的交通擁堵狀況。
4、傳統(tǒng)的泊車輔助技術(shù),如倒車影像、倒車雷達等,雖能在一定程度上為駕駛員提供后方視野信息及障礙物距離警示,但對于復(fù)雜車位環(huán)境的整體感知和智能泊車決策支持仍顯不足。它們無法對車位空間進行全面分析,不能依據(jù)車內(nèi)人員情況動態(tài)調(diào)整泊車策略,難以滿足駕駛員在各種復(fù)雜停車場景下便捷、安全泊車的迫切需求。
5、綜上所述,如何選擇合適的車位,并完成泊車,成為了亟待解決的問題。
技術(shù)實現(xiàn)思路
1、有鑒于此,本發(fā)明提供了一種自動泊車方法、裝置、電子設(shè)備及目標車輛,以解決如何選擇合適的車位,并完成泊車的問題。
2、第一方面,本發(fā)明提供了一種自動泊車方法,該方法包括:
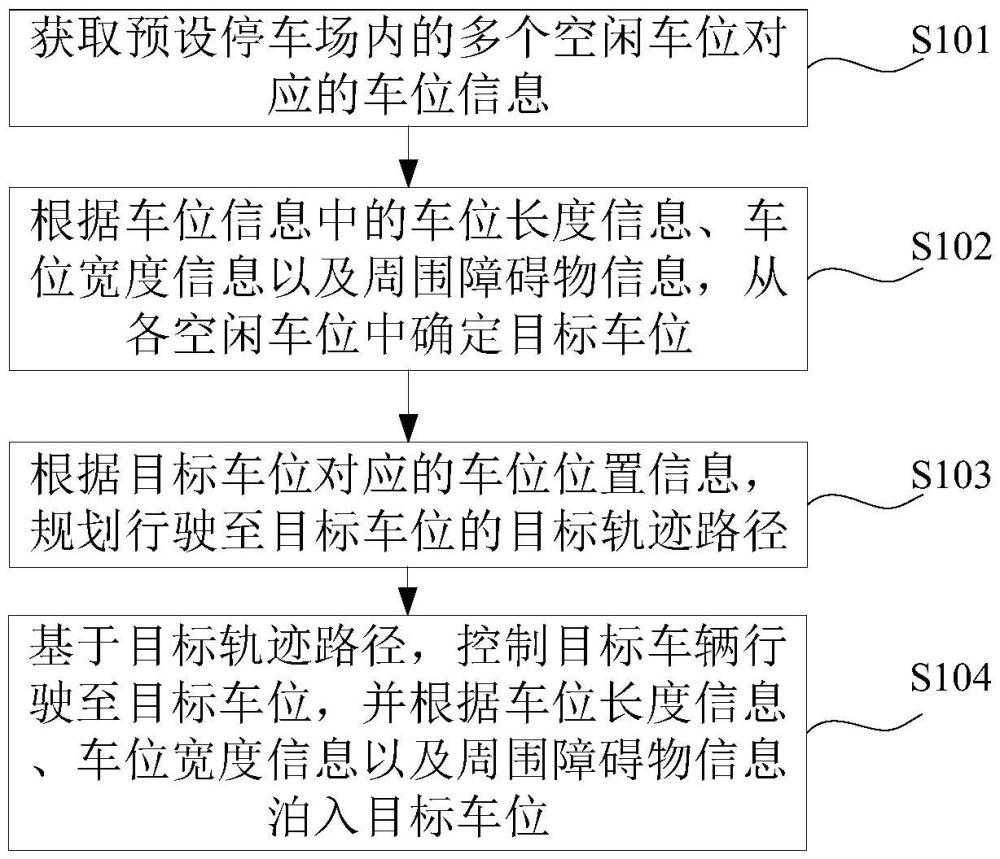
3、獲取預(yù)設(shè)停車場內(nèi)的多個空閑車位對應(yīng)的車位信息;車位信息中包括空閑車位對應(yīng)的車位位置信息、車位長度信息、車位寬度信息以及周圍障礙物信息;
4、根據(jù)車位信息中的車位長度信息、車位寬度信息以及周圍障礙物信息,從各空閑車位中確定目標車位;
5、根據(jù)目標車位對應(yīng)的車位位置信息,規(guī)劃行駛至目標車位的目標軌跡路徑;
6、基于目標軌跡路徑,控制目標車輛行駛至目標車位,并根據(jù)車位長度信息、車位寬度信息以及周圍障礙物信息泊入目標車位。
7、本技術(shù)實施例提供的自動泊車方法,獲取預(yù)設(shè)停車場內(nèi)的多個空閑車位對應(yīng)的車位信息;根據(jù)車位信息中的車位長度信息、車位寬度信息以及周圍障礙物信息,從各空閑車位中確定目標車位,保證了確定的目標車位可以滿足目標車輛泊車需求,進而保證了得到的目標車位的準確性。然后,根據(jù)目標車位對應(yīng)的車位位置信息,規(guī)劃行駛至目標車位的目標軌跡路徑,保證了規(guī)劃得到的目標軌跡路徑的準確性。然后,基于目標軌跡路徑,控制目標車輛行駛至目標車位,并根據(jù)車位長度信息、車位寬度信息以及周圍障礙物信息泊入目標車位,從而實現(xiàn)了將目標車輛泊入目標車位。上述方法,基于多個空閑車位對應(yīng)的車位信息確定了目標車位,且實現(xiàn)了自動泊車。解決了如何選擇合適的車位,并完成泊車的問題。
8、在一種可選的實施方式中,根據(jù)車位信息中的車位長度信息、車位寬度信息以及周圍障礙物信息,從各空閑車位中確定目標車位,包括:
9、對各空閑車位對應(yīng)的周圍障礙物信息進行識別,檢測各空閑車位對應(yīng)的周圍障礙物是否影響停車;
10、獲取目標車輛對應(yīng)的車輛長度信息和車輛寬度信息;
11、將車輛長度信息和車位長度信息進行對比,車輛寬度信息和車位寬度信息進行對比;
12、將車位長度信息小于車輛長度信息,和/或車位寬度信息小于車輛寬度信息,和/或周圍障礙物影響停車的空閑車位刪除,得到各個備用車位;
13、根據(jù)備用車位對應(yīng)的車位寬度信息以及周圍障礙物信息,從各備用車位中確定目標車位。
14、本技術(shù)實施例提供的自動泊車方法,對各空閑車位對應(yīng)的周圍障礙物信息進行識別,檢測各空閑車位對應(yīng)的周圍障礙物是否影響停車,保證了得到的檢測結(jié)果的準確性。然后,獲取目標車輛對應(yīng)的車輛長度信息和車輛寬度信息;將車輛長度信息和車位長度信息進行對比,車輛寬度信息和車位寬度信息進行對比;將車位長度信息小于車輛長度信息,和/或車位寬度信息小于車輛寬度信息,和/或周圍障礙物影響停車的空閑車位刪除,得到各個備用車位,從而刪除了目標車輛不能泊入的空閑車位,保證了得到的各個備用車位的準確性。然后,根據(jù)備用車位對應(yīng)的車位寬度信息以及周圍障礙物信息,從各備用車位中確定目標車位,保證了確定的目標車位能夠滿足目標車輛泊入需求,避免了確定的目標車位的實際尺寸與目標車輛不適配,或/和周邊空間不能滿足目標車輛停車及后續(xù)下車需求。
15、在一種可選的實施方式中,根據(jù)備用車位對應(yīng)的車位寬度信息以及周圍障礙物信息,從各備用車位中確定目標車位,包括:
16、獲取目標車輛內(nèi)的司乘人員對應(yīng)的座位位置信息以及人員信息;人員信息包括是否行動不方便信息、體重信息以及身高信息;
17、根據(jù)座位位置信息以及人員信息,確定在司乘人員下車時目標車輛的雙側(cè)車門分別對應(yīng)的最小開啟距離;
18、根據(jù)雙側(cè)車門分別對應(yīng)的最小開啟距離、車輛寬度信息、各備用車位對應(yīng)的車位寬度信息以及周圍障礙物信息,從各備用車位中確定目標車位。
19、本技術(shù)實施例提供的自動泊車方法,獲取目標車輛內(nèi)的司乘人員對應(yīng)的座位位置信息以及人員信息;根據(jù)座位位置信息以及人員信息,確定在司乘人員下車時目標車輛的雙側(cè)車門分別對應(yīng)的最小開啟距離,保證了確定的在司乘人員下車時目標車輛的雙側(cè)車門分別對應(yīng)的最小開啟距離的準確性。然后,根據(jù)雙側(cè)車門分別對應(yīng)的最小開啟距離、車輛寬度信息、各備用車位對應(yīng)的車位寬度信息以及周圍障礙物信息,從各備用車位中確定目標車位,保證了確定的目標車位可以滿足目標車輛泊入需求,且滿足司乘人員的后續(xù)下車需求。此外,保證了確定的目標車位的準確性,且最為適合目標車輛。
20、在一種可選的實施方式中,根據(jù)雙側(cè)車門分別對應(yīng)的最小開啟距離、車輛寬度信息、各備用車位對應(yīng)的車位寬度信息以及周圍障礙物信息,從各備用車位中確定目標車位,包括:
21、將雙側(cè)車門分別對應(yīng)的最小開啟距離與車輛寬度信息進行相加得到第一寬度信息;
22、將第一寬度信息與各備用車位對應(yīng)的車位寬度信息進行對比;
23、從各備用車位中選擇車位寬度信息大于第一寬度信息的候選車位;
24、根據(jù)各候選車位對應(yīng)的周圍障礙物信息,從中選擇目標車位。
25、本技術(shù)實施例提供的自動泊車方法,將雙側(cè)車門分別對應(yīng)的最小開啟距離與車輛寬度信息進行相加得到第一寬度信息,保證了得到的第一寬度信息的準確性。將第一寬度信息與各備用車位對應(yīng)的車位寬度信息進行對比;從各備用車位中選擇車位寬度信息大于第一寬度信息的候選車位,保證了確定的候選車位的能夠滿足目標車輛泊入需求,避免了確定的目標車位的實際尺寸與目標車輛不適配,或/和周邊空間不能滿足目標車輛停車及后續(xù)下車需求。然后,根據(jù)各候選車位對應(yīng)的周圍障礙物信息,從中選擇目標車位,保證了確定的目標車位的準確性,且最為適合目標車輛。
26、在一種可選的實施方式中,根據(jù)雙側(cè)車門分別對應(yīng)的最小開啟距離、車輛寬度信息、各備用車位對應(yīng)的車位寬度信息以及周圍障礙物信息,從各備用車位中確定目標車位,還包括:
27、若不存在車位寬度信息大于第一寬度信息的備用車位,則從雙側(cè)車門分別對應(yīng)的最小開啟距離中選擇最大的最小開啟距離;
28、將最大的最小開啟距離與車輛寬度信息進行相加得到第二寬度信息;
29、將第二寬度信息與各備用車位對應(yīng)的車位寬度信息進行對比;
30、從各備用車位中選擇車位寬度信息大于第二寬度信息的候選車位;
31、根據(jù)各候選車位對應(yīng)的周圍障礙物信息,從中選擇目標車位。
32、本技術(shù)實施例提供的自動泊車方法,若不存在車位寬度信息大于第一寬度信息的備用車位,則從雙側(cè)車門分別對應(yīng)的最小開啟距離中選擇最大的最小開啟距離,保證了確定的最大的最小開啟距離的準確性。然后,將最大的最小開啟距離與車輛寬度信息進行相加得到第二寬度信息。保證了得到的第二寬度信息的準確性,從而可以根據(jù)第二寬度信息確定候選車位。然后,將第二寬度信息與各備用車位對應(yīng)的車位寬度信息進行對比;從各備用車位中選擇車位寬度信息大于第二寬度信息的候選車位,從而使得司乘人員可以在車門開啟的一側(cè)進行下車,從而滿足目標車輛的泊入需求。然后,根據(jù)各候選車位對應(yīng)的周圍障礙物信息,從中選擇目標車位,保證了確定的目標車位的準確性,且最為適合目標車輛。
33、在一種可選的實施方式中,根據(jù)雙側(cè)車門分別對應(yīng)的最小開啟距離、車輛寬度信息、各備用車位對應(yīng)的車位寬度信息以及周圍障礙物信息,從各備用車位中確定目標車位,還包括:
34、若不存在車位寬度信息大于第二寬度信息的備用車位,則將車輛寬度信息與各備用車位對應(yīng)的車位寬度信息進行對比;
35、從各備用車位中選擇車位寬度信息大于車輛寬度信息的候選車位;
36、根據(jù)各候選車位對應(yīng)的周圍障礙物信息,從中選擇目標車位。
37、本技術(shù)實施例提供的自動泊車方法,若不存在車位寬度信息大于第二寬度信息的備用車位,則將車輛寬度信息與各備用車位對應(yīng)的車位寬度信息進行對比;從各備用車位中選擇車位寬度信息大于車輛寬度信息的候選車位,保證了確定的候選車位在不需要司乘人員下車的情況下,滿足目標車輛的泊入需求。然后,根據(jù)各候選車位對應(yīng)的周圍障礙物信息,從中選擇目標車位,保證了確定的目標車位的準確性,且最為適合目標車輛。
38、在一種可選的實施方式中,根據(jù)目標車位對應(yīng)的車位位置信息,規(guī)劃行駛至目標車位的目標軌跡路徑,包括:
39、獲取目標車輛對應(yīng)的車輛位置信息、目標車位對應(yīng)的車位位置信息以及預(yù)設(shè)停車場內(nèi)的電梯口位置信息;
40、根據(jù)車輛位置信息、車位位置信息以及電梯口位置信息,規(guī)劃從目標車輛經(jīng)過電梯口到達目標車位的目標軌跡路徑;
41、對應(yīng)的,基于目標軌跡路徑,控制目標車輛行駛至目標車位,包括:
42、基于目標軌跡路徑,控制目標車輛行駛至電梯口停止,以使司乘人員下車;
43、在司乘人員下車后,控制目標車輛行駛至目標車位。
44、本技術(shù)實施例提供的自動泊車方法,獲取目標車輛對應(yīng)的車輛位置信息、目標車位對應(yīng)的車位位置信息以及預(yù)設(shè)停車場內(nèi)的電梯口位置信息;根據(jù)車輛位置信息、車位位置信息以及電梯口位置信息,規(guī)劃從目標車輛經(jīng)過電梯口到達目標車位的目標軌跡路徑,保證了規(guī)劃的得到的目標軌跡路徑的準確性。基于目標軌跡路徑,控制目標車輛行駛至電梯口停止,以使司乘人員下車,從而使得目標車輛不需要在目標車位內(nèi)開啟車門,從而滿足目標車輛的泊入需求。然后,在司乘人員下車后,控制目標車輛行駛至目標車位,從而可以控制目標車輛泊入目標車位。
45、在一種可選的實施方式中,根據(jù)各候選車位對應(yīng)的周圍障礙物信息,從中選擇目標車位,包括:
46、根據(jù)各候選車位對應(yīng)的周圍障礙物信息,選擇周圍無障礙物的候選車位為第一目標候選車位;
47、根據(jù)各第一目標候選車位的車位位置信息,計算各第一目標候選車位與目標車輛之間的第一距離,以及各第一目標候選車位與電梯口之間的第二距離;
48、根據(jù)第一距離和第二距離,從各第一目標候選車位中確定目標車位。
49、本技術(shù)實施例提供的自動泊車方法,根據(jù)各候選車位對應(yīng)的周圍障礙物信息,選擇周圍無障礙物的候選車位為第一目標候選車位,保證了選擇的第一目標候選車位周圍沒有障礙物,更加方便停車。然后,根據(jù)各第一目標候選車位的車位位置信息,計算各第一目標候選車位與目標車輛之間的第一距離,以及各第一目標候選車位與電梯口之間的第二距離,保證了計算得到的第一距離和第二距離的準確性。根據(jù)第一距離和第二距離,從各第一目標候選車位中確定目標車位,保證了確定的目標車位,不會距離電梯口以及目標車輛太遠。進而可以方便司乘人員上電梯,且方便停車。
50、第二方面,本發(fā)明提供了一種自動泊車裝置,裝置包括:
51、獲取模塊,用于獲取預(yù)設(shè)停車場內(nèi)的多個空閑車位對應(yīng)的車位信息;車位信息中包括空閑車位對應(yīng)的車位位置信息、車位長度信息、車位寬度信息以及周圍障礙物信息;
52、確定模塊,用于根據(jù)車位信息中的車位長度信息、車位寬度信息以及周圍障礙物信息,從各空閑車位中確定目標車位;
53、規(guī)劃模塊,用于根據(jù)目標車位對應(yīng)的車位位置信息,規(guī)劃行駛至目標車位的目標軌跡路徑;
54、控制模塊,用于基于目標軌跡路徑,控制目標車輛行駛至目標車位,并根據(jù)車位長度信息、車位寬度信息以及周圍障礙物信息泊入目標車位。
55、本技術(shù)實施例提供的自動泊車方法,獲取預(yù)設(shè)停車場內(nèi)的多個空閑車位對應(yīng)的車位信息;根據(jù)車位信息中的車位長度信息、車位寬度信息以及周圍障礙物信息,從各空閑車位中確定目標車位,保證了確定的目標車位可以滿足目標車輛泊車需求,進而保證了得到的目標車位的準確性。然后,根據(jù)目標車位對應(yīng)的車位位置信息,規(guī)劃行駛至目標車位的目標軌跡路徑,保證了規(guī)劃得到的目標軌跡路徑的準確性。然后,基于目標軌跡路徑,控制目標車輛行駛至目標車位,并根據(jù)車位長度信息、車位寬度信息以及周圍障礙物信息泊入目標車位,從而實現(xiàn)了將目標車輛泊入目標車位。上述方法,基于多個空閑車位對應(yīng)的車位信息確定了目標車位,且實現(xiàn)了自動泊車。解決了如何選擇合適的車位,并完成泊車的問題。
56、第三方面,本發(fā)明提供了一種目標車輛,包括車輛本體以及電子設(shè)備,電子設(shè)備,包括:存儲器和處理器,存儲器和處理器之間互相通信連接,存儲器中存儲有計算機指令,處理器通過執(zhí)行計算機指令,從而執(zhí)行上述第一方面或其對應(yīng)的任一實施方式的自動泊車方法。
- 還沒有人留言評論。精彩留言會獲得點贊!