可移動(dòng)警示牌釋放和回收方法及裝置、車輛與流程
本發(fā)明涉及車輛警示牌,具體而言,涉及一種可移動(dòng)警示牌釋放和回收方法、可移動(dòng)警示牌釋放和回收裝置、計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)、計(jì)算機(jī)程序產(chǎn)品和車輛。
背景技術(shù):
1、車輛異常停車后,駕駛員打開后備箱、下車拿出警示牌并攜帶警示牌步行至車輛后方150m或其他合適位置,放置警示牌;對(duì)于無人自動(dòng)駕駛車輛,則無法放置三角警示牌。均是針對(duì)有人駕駛設(shè)計(jì),由駕駛員現(xiàn)場判斷警示牌釋放需求、交通狀態(tài)、投放位置等,不適用于無人駕駛車輛;現(xiàn)有部分無人駕駛車輛能夠釋放警示牌,但是僅由無人駕駛車輛進(jìn)行判斷并釋放而未設(shè)計(jì)冗余控制鏈路,系統(tǒng)魯棒性不高。并且,依靠人工回收,需要司機(jī)或安全員走到投放位置,將三角牌撿起收納,并拿回放置于車內(nèi),這個(gè)流程不適用于自動(dòng)駕駛車輛。
技術(shù)實(shí)現(xiàn)思路
1、本技術(shù)的主要目的在于提供一種可移動(dòng)警示牌釋放和回收方法、可移動(dòng)警示牌釋放和回收裝置、計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)、計(jì)算機(jī)程序產(chǎn)品和車輛,以至少解決現(xiàn)有技術(shù)中僅依靠駕駛員自主判斷并釋放警示牌和人工回收警示牌的缺陷導(dǎo)致增加人工成本的問題。
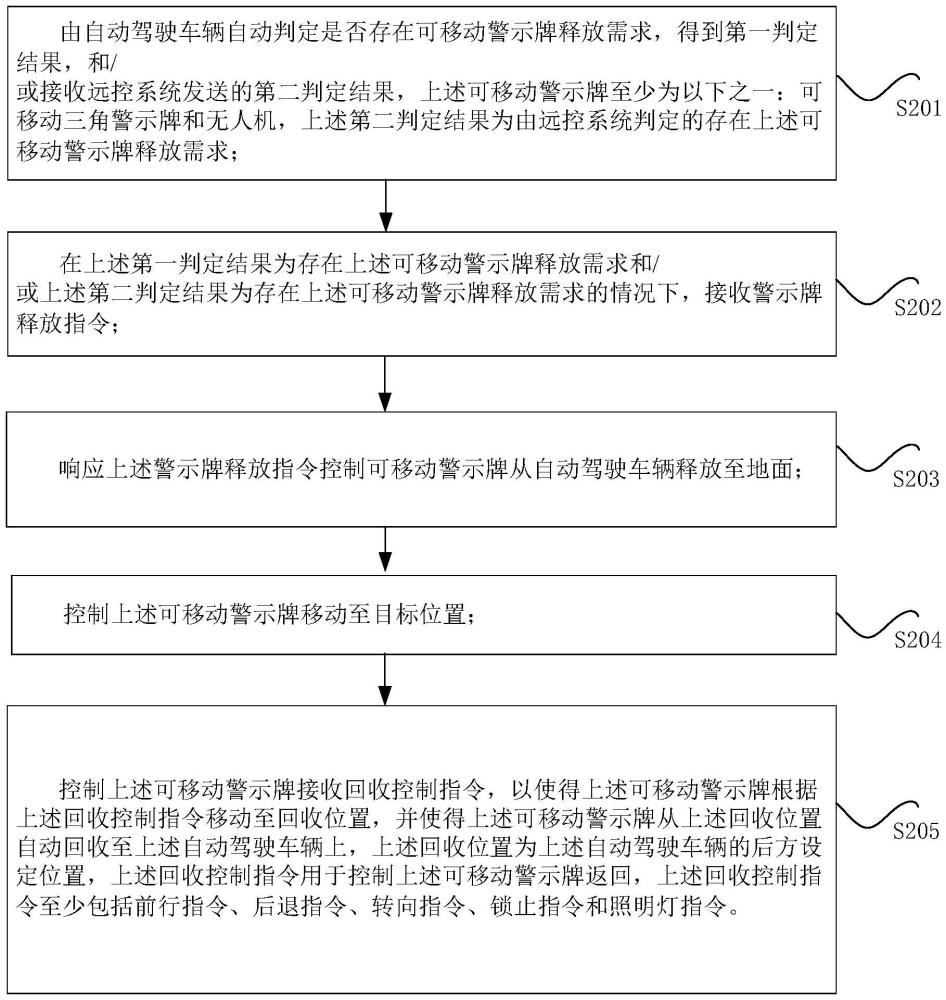
2、為了實(shí)現(xiàn)上述目的,根據(jù)本技術(shù)的一個(gè)方面,提供了一種可移動(dòng)警示牌釋放和回收方法,包括:由自動(dòng)駕駛車輛自動(dòng)判定是否存在可移動(dòng)警示牌釋放需求,得到第一判定結(jié)果,和/或接收遠(yuǎn)控系統(tǒng)發(fā)送的第二判定結(jié)果,所述可移動(dòng)警示牌至少為以下之一:可移動(dòng)三角警示牌和無人機(jī),所述第二判定結(jié)果為由遠(yuǎn)控系統(tǒng)判定的存在所述可移動(dòng)警示牌釋放需求;在所述第一判定結(jié)果為存在所述可移動(dòng)警示牌釋放需求和/或所述第二判定結(jié)果為存在所述可移動(dòng)警示牌釋放需求的情況下,接收警示牌釋放指令;響應(yīng)所述警示牌釋放指令控制可移動(dòng)警示牌從自動(dòng)駕駛車輛釋放至地面;控制所述可移動(dòng)警示牌移動(dòng)至目標(biāo)位置;控制所述可移動(dòng)警示牌接收回收控制指令,以使得所述可移動(dòng)警示牌根據(jù)所述回收控制指令移動(dòng)至回收位置,并使得所述可移動(dòng)警示牌從所述回收位置自動(dòng)回收至所述自動(dòng)駕駛車輛上,所述回收位置為所述自動(dòng)駕駛車輛的后方設(shè)定位置,所述回收控制指令用于控制所述可移動(dòng)警示牌返回,所述回收控制指令至少包括前行指令、后退指令、轉(zhuǎn)向指令、鎖止指令和照明燈指令。
3、可選地,由自動(dòng)駕駛車輛自動(dòng)判定是否存在可移動(dòng)警示牌釋放需求,得到第一判定結(jié)果,和/或接收遠(yuǎn)控系統(tǒng)發(fā)送的第二判定結(jié)果,包括:獲取所述自動(dòng)駕駛車輛自動(dòng)監(jiān)測(cè)的第一車輛狀態(tài)和第二車輛狀態(tài),所述第一車輛狀態(tài)為車輛異常停車或者車輛正常停車,所述車輛異常停車包括所述自動(dòng)駕駛車輛出現(xiàn)故障且未行駛至設(shè)定站點(diǎn),或者所述自動(dòng)駕駛車輛出現(xiàn)碰撞事故且未行駛至所述設(shè)定站點(diǎn),所述第二車輛狀態(tài)包括車輛鏈路正常工作或者車輛鏈路發(fā)生故障的狀態(tài),所述車輛鏈路正常工作為在所述可移動(dòng)警示牌的安裝位置為后背門的情況下所述自動(dòng)駕駛車輛的后背門控制鏈路正常工作、后背門未被擠壓以及所述可移動(dòng)警示牌的釋放鏈路正常工作,或者在所述可移動(dòng)警示牌的安裝位置為車頂或車底的情況下所述可移動(dòng)警示牌的釋放鏈路正常工作,所述車輛鏈路發(fā)生故障為在所述可移動(dòng)警示牌的安裝位置為后背門的情況下所述自動(dòng)駕駛車輛的后背門控制鏈路發(fā)生故障,或者后背門被擠壓,或者所述可移動(dòng)警示牌的釋放鏈路發(fā)生故障,或者在所述可移動(dòng)警示牌的安裝位置為車頂或車底的情況下所述可移動(dòng)警示牌的釋放鏈路發(fā)生故障,所述釋放鏈路為控制所述可移動(dòng)警示牌釋放的通信線路;在所述第一車輛狀態(tài)為所述車輛異常停車且所述第二車輛狀態(tài)為所述車輛鏈路正常工作的情況下,確定所述第一判定結(jié)果為存在所述可移動(dòng)警示牌釋放需求;在所述第二車輛狀態(tài)為所述車輛鏈路正常工作且接收到所述遠(yuǎn)控系統(tǒng)發(fā)送的遠(yuǎn)程釋放指令的情況下,確定所述第二判定結(jié)果為存在所述可移動(dòng)警示牌釋放需求并接收所述第二判定結(jié)果。
4、可選地,在所述第二車輛狀態(tài)為所述車輛鏈路正常工作且接收到所述遠(yuǎn)控系統(tǒng)發(fā)送的遠(yuǎn)程釋放指令的情況下,確定所述第二判定結(jié)果為存在所述可移動(dòng)警示牌釋放需求之前,所述方法還包括:將所述自動(dòng)駕駛車輛的監(jiān)控視頻發(fā)送至所述遠(yuǎn)控系統(tǒng),以利用所述遠(yuǎn)控系統(tǒng)根據(jù)所述監(jiān)控視頻對(duì)所述自動(dòng)駕駛車輛進(jìn)行異常分析,得到分析結(jié)果,所述分析結(jié)果包括所述自動(dòng)駕駛車輛存在故障或者發(fā)生碰撞事故,或者所述自動(dòng)駕駛車輛無異常;在所述分析結(jié)果為所述自動(dòng)駕駛車輛存在故障或者發(fā)生碰撞事故的情況下,控制所述遠(yuǎn)控系統(tǒng)向所述自動(dòng)駕駛車輛發(fā)送所述遠(yuǎn)程釋放指令。
5、可選地,響應(yīng)所述警示牌釋放指令控制可移動(dòng)警示牌從自動(dòng)駕駛車輛釋放至地面,包括:在所述可移動(dòng)警示牌的安裝位置為后背門的情況下,依次控制所述后背門開啟、控制警示牌固定裝置解鎖和控制警示牌釋放裝置解鎖,使得將所述可移動(dòng)警示牌釋放至所述地面,所述警示牌固定裝置為將所述可移動(dòng)警示牌固定在所述自動(dòng)駕駛車輛上的裝置,所述警示牌釋放裝置為將所述可移動(dòng)警示牌從所述自動(dòng)駕駛車輛上釋放的裝置;在所述可移動(dòng)警示牌的安裝位置為車頂或車底的情況下,依次控制所述警示牌固定裝置解鎖和控制所述警示牌釋放裝置解鎖,使得將所述可移動(dòng)警示牌釋放至所述地面。
6、可選地,在響應(yīng)所述警示牌釋放指令控制可移動(dòng)警示牌從自動(dòng)駕駛車輛釋放至地面之后,所述方法還包括:控制所述可移動(dòng)警示牌與所述自動(dòng)駕駛車輛之間的牽引吸合裝置斷開,所述牽引吸合裝置安裝于所述可移動(dòng)警示牌上,所述牽引吸合裝置通過牽引線與警示牌釋放裝置連接,所述警示牌釋放裝置為將所述可移動(dòng)警示牌從所述自動(dòng)駕駛車輛上釋放的裝置;控制所述可移動(dòng)警示牌的警示燈條開啟;在所述可移動(dòng)警示牌的安裝位置為后背門的情況下,控制所述后背門關(guān)閉;將當(dāng)前車輛狀態(tài)上傳至所述遠(yuǎn)控系統(tǒng),所述當(dāng)前車輛狀態(tài)包括后背門狀態(tài)、警示牌固定裝置狀態(tài)以及警示牌釋放裝置狀態(tài),所述后背門狀態(tài)包括后背門開啟或者后背門關(guān)閉,所述警示牌固定裝置狀態(tài)包括警示牌固定裝置為解鎖狀態(tài)或者所述警示牌固定裝置為閉鎖狀態(tài),所述警示牌固定裝置為將所述可移動(dòng)警示牌固定在所述自動(dòng)駕駛車輛上的裝置,所述警示牌釋放裝置狀態(tài)包括所述警示牌釋放裝置為解鎖狀態(tài)或者所述警示牌釋放裝置為閉鎖狀態(tài)。
7、可選地,控制所述可移動(dòng)警示牌移動(dòng)至目標(biāo)位置,包括:獲取自動(dòng)駕駛車輛所在車道的后向環(huán)境情況;在所述后向環(huán)境情況滿足環(huán)境條件的情況下,控制所述可移動(dòng)警示牌移動(dòng)至距離所述自動(dòng)駕駛車輛為設(shè)定距離的位置,所述環(huán)境條件為所在車道的后向無障礙物阻擋且后向無彎道;在所述后向環(huán)境情況不滿足所述環(huán)境條件且所述自動(dòng)駕駛車輛所在車道存在后向障礙物阻擋的情況下,控制所述可移動(dòng)警示牌移動(dòng)至所述自動(dòng)駕駛車輛與所述后向障礙物的中間位置;在所述后向環(huán)境情況不滿足所述環(huán)境條件且后向存在彎道的情況下,控制所述可移動(dòng)警示牌移動(dòng)至后方探測(cè)終點(diǎn)的位置,所述后方探測(cè)終點(diǎn)為所述自動(dòng)駕駛車輛的傳感器對(duì)所述自動(dòng)駕駛車輛的后方所能最大范圍探測(cè)到的路況終點(diǎn)。
8、可選地,控制所述可移動(dòng)警示牌移動(dòng)至目標(biāo)位置,還包括:在控制所述可移動(dòng)警示牌移動(dòng)至所述目標(biāo)位置的過程中,控制所述可移動(dòng)警示牌接收第一控制指令,以使得所述可移動(dòng)警示牌根據(jù)所述第一控制指令將警示牌狀態(tài)上傳至所述自動(dòng)駕駛車輛和遠(yuǎn)控系統(tǒng),所述第一控制指令至少包括前行指令、后退指令、轉(zhuǎn)向指令、鎖止指令和照明燈指令,所述警示牌狀態(tài)至少包括所述可移動(dòng)警示牌的當(dāng)前速度、移動(dòng)路徑、移動(dòng)距離和移動(dòng)狀態(tài),所述移動(dòng)距離為所述可移動(dòng)警示牌與所述自動(dòng)駕駛車輛之間的距離,所述移動(dòng)狀態(tài)至少包括所述可移動(dòng)警示牌的移動(dòng)正常,或者異常卡死狀態(tài)或者輪子鎖止?fàn)顟B(tài),所述異常卡死狀態(tài)為所述可移動(dòng)警示牌就地停止移動(dòng)的狀態(tài),所述輪子鎖止?fàn)顟B(tài)為所述可移動(dòng)警示牌到達(dá)所述目標(biāo)位置時(shí)將輪子進(jìn)行鎖止的狀態(tài)。
9、可選地,在控制所述可移動(dòng)警示牌將警示牌狀態(tài)上傳至所述自動(dòng)駕駛車輛和遠(yuǎn)控系統(tǒng)之后,所述方法還包括:在所述警示牌狀態(tài)中的移動(dòng)狀態(tài)為所述異常卡死狀態(tài)的情況下,控制所述自動(dòng)駕駛車輛每隔設(shè)定時(shí)長向所述可移動(dòng)警示牌下發(fā)移動(dòng)指令;在下發(fā)所述移動(dòng)指令達(dá)到設(shè)定次數(shù)且所述警示牌狀態(tài)中的移動(dòng)狀態(tài)仍為所述異常卡死狀態(tài)的情況下,發(fā)出救援信息,所述救援信息用于提示所述可移動(dòng)警示牌出現(xiàn)異常卡死故障導(dǎo)致無法移動(dòng)。
10、可選地,在控制所述可移動(dòng)警示牌接收回收控制指令,以使得所述可移動(dòng)警示牌根據(jù)所述回收控制指令移動(dòng)至回收位置之后,所述方法還包括:在所述可移動(dòng)警示牌的安裝位置為后背門的情況下,控制所述后背門開啟;控制所述可移動(dòng)警示牌接收第三控制指令,以使得所述可移動(dòng)警示牌根據(jù)所述第三控制指令進(jìn)行自動(dòng)折疊并自動(dòng)回收至所述自動(dòng)駕駛車輛的警示牌固定裝置上,同時(shí)將當(dāng)前警示牌狀態(tài)上傳至所述自動(dòng)駕駛車輛和遠(yuǎn)控系統(tǒng),所述第三控制指令至少包括折疊可移動(dòng)警示牌指令、所述可移動(dòng)警示牌恢復(fù)與所述自動(dòng)駕駛車輛硬件連接指令以及回收所述可移動(dòng)警示牌指令,所述可移動(dòng)警示牌恢復(fù)與所述自動(dòng)駕駛車輛硬件連接指令為牽引吸合裝置與警示牌釋放裝置進(jìn)行吸合的指令,所述當(dāng)前警示牌狀態(tài)至少包括可移動(dòng)警示牌已折疊、可移動(dòng)警示牌折疊失敗、所述可移動(dòng)警示牌的所述牽引吸合裝置已吸合、所述可移動(dòng)警示牌的所述牽引吸合裝置吸合失敗、所述可移動(dòng)警示牌已回收至車內(nèi)、可移動(dòng)警示牌回收失敗;在所述可移動(dòng)警示牌的安裝位置為后背門的情況下,控制所述后背門關(guān)閉。
11、根據(jù)本技術(shù)的另一方面,提供了一種可移動(dòng)警示牌釋放和回收裝置,所述裝置包括:判定單元,用于由自動(dòng)駕駛車輛自動(dòng)判定是否存在可移動(dòng)警示牌釋放需求,得到第一判定結(jié)果,和/或接收遠(yuǎn)控系統(tǒng)發(fā)送的第二判定結(jié)果,所述可移動(dòng)警示牌至少為以下之一:可移動(dòng)三角警示牌和無人機(jī),所述第二判定結(jié)果為由遠(yuǎn)控系統(tǒng)判定的存在所述可移動(dòng)警示牌釋放需求;接收單元,用于在所述第一判定結(jié)果為存在所述可移動(dòng)警示牌釋放需求和/或所述第二判定結(jié)果為存在所述可移動(dòng)警示牌釋放需求的情況下,接收警示牌釋放指令;釋放單元,用于響應(yīng)所述警示牌釋放指令控制可移動(dòng)警示牌從自動(dòng)駕駛車輛釋放至地面;移動(dòng)單元,用于控制所述可移動(dòng)警示牌移動(dòng)至目標(biāo)位置;回收單元,用于控制所述可移動(dòng)警示牌接收回收控制指令,以使得所述可移動(dòng)警示牌根據(jù)所述回收控制指令移動(dòng)至回收位置,并使得所述可移動(dòng)警示牌從所述回收位置自動(dòng)回收至所述自動(dòng)駕駛車輛上,所述回收位置為所述自動(dòng)駕駛車輛的后方設(shè)定位置,所述回收控制指令用于控制所述可移動(dòng)警示牌返回,所述回收控制指令至少包括前行指令、后退指令、轉(zhuǎn)向指令、鎖止指令和照明燈指令。
12、根據(jù)本技術(shù)的再一方面,提供了一種計(jì)算機(jī)可讀存儲(chǔ)介質(zhì),所述計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)包括存儲(chǔ)的程序,其中,在所述程序運(yùn)行時(shí)控制所述計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)所在設(shè)備執(zhí)行任意一種所述的方法。
13、根據(jù)本技術(shù)的又一方面,提供了一種計(jì)算機(jī)程序產(chǎn)品,包括計(jì)算機(jī)指令,所述計(jì)算機(jī)指令被處理器執(zhí)行時(shí)實(shí)現(xiàn)任意一種所述的方法。
14、根據(jù)本技術(shù)的又一方面,提供了一種車輛,包括:一個(gè)或多個(gè)處理器,存儲(chǔ)器,以及一個(gè)或多個(gè)程序,其中,所述一個(gè)或多個(gè)程序被存儲(chǔ)在所述存儲(chǔ)器中,并且被配置為由所述一個(gè)或多個(gè)處理器執(zhí)行,所述一個(gè)或多個(gè)程序包括用于執(zhí)行任意一種所述的方法。
15、應(yīng)用本技術(shù)的技術(shù)方案,在可移動(dòng)警示牌釋放和回收方法中,首先,由自動(dòng)駕駛車輛自動(dòng)判定是否存在可移動(dòng)警示牌釋放需求,得到第一判定結(jié)果,和/或接收遠(yuǎn)控系統(tǒng)發(fā)送的第二判定結(jié)果,上述可移動(dòng)警示牌至少為以下之一:可移動(dòng)三角警示牌和無人機(jī),上述第二判定結(jié)果為由遠(yuǎn)控系統(tǒng)判定的存在上述可移動(dòng)警示牌釋放需求;然后,在上述第一判定結(jié)果為存在上述可移動(dòng)警示牌釋放需求和/或上述第二判定結(jié)果為存在上述可移動(dòng)警示牌釋放需求的情況下,接收警示牌釋放指令;之后,響應(yīng)上述警示牌釋放指令控制可移動(dòng)警示牌從自動(dòng)駕駛車輛釋放至地面;之后,控制上述可移動(dòng)警示牌移動(dòng)至目標(biāo)位置;最后,控制所述可移動(dòng)警示牌接收回收控制指令,以使得所述可移動(dòng)警示牌根據(jù)所述回收控制指令移動(dòng)至回收位置,并使得所述可移動(dòng)警示牌從所述回收位置自動(dòng)回收至所述自動(dòng)駕駛車輛上,所述回收位置為所述自動(dòng)駕駛車輛的后方設(shè)定位置,所述回收控制指令用于控制所述可移動(dòng)警示牌返回,所述回收控制指令至少包括前行指令、后退指令、轉(zhuǎn)向指令、鎖止指令和照明燈指令。本技術(shù)通過在自動(dòng)駕駛車輛內(nèi)常態(tài)化裝載警示牌,并根據(jù)釋放需求控制警示牌穩(wěn)定釋放并移動(dòng)至目標(biāo)位置;遠(yuǎn)控系統(tǒng)可通過監(jiān)控視頻觀察自動(dòng)駕駛車輛及警示牌周圍環(huán)境,判斷是否存在警示牌釋放需求,在存在警示牌釋放需求的情況下發(fā)送警示牌釋放指令給自動(dòng)駕駛車輛,控制警示牌釋放并移動(dòng)至目標(biāo)位置,最后在警示任務(wù)完成之后,下發(fā)回收控制指令,使得可移動(dòng)警示牌實(shí)現(xiàn)自動(dòng)回收。本技術(shù)解決了現(xiàn)有技術(shù)中僅依靠駕駛員自主判斷并釋放警示牌和人工回收警示牌的缺陷導(dǎo)致增加人工成本的問題。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!