運行單輪轉(zhuǎn)向調(diào)節(jié)器有缺陷的車輛的方法和控制器與流程
本發(fā)明涉及一種運行單輪轉(zhuǎn)向調(diào)節(jié)器(einzelradlenksteller)有缺陷的車輛的方法、一種相應(yīng)的控制器以及一種相應(yīng)的計算機程序產(chǎn)品。
背景技術(shù):
1、車輛可以具有緊急制動輔助系統(tǒng)。當車輛有可能撞上障礙物并發(fā)生碰撞時,緊急制動輔助系統(tǒng)可通過自動制動干預(yù)觸發(fā)車輛緊急制動,例如,如果車輛駕駛員忽略了交通堵塞末端(stauende),從而會導(dǎo)致與交通堵塞末端的至少一輛車發(fā)生碰撞。
2、先進的緊急制動輔助系統(tǒng)還可以通過自動轉(zhuǎn)向干預(yù)來觸發(fā)車輛的避讓動作,以側(cè)向地避開障礙物并防止發(fā)生否則不可避免的碰撞,或減少制動力度。例如,先進的緊急制動輔助系統(tǒng)可將車輛轉(zhuǎn)向至交通堵塞末端旁的空閑車道,從而防止碰撞。
技術(shù)實現(xiàn)思路
1、在此背景下,利用本文介紹的方法介紹了根據(jù)獨立權(quán)利要求所述的一種運行單輪轉(zhuǎn)向調(diào)節(jié)器有缺陷的車輛的方法、一種相應(yīng)的控制器和一種相應(yīng)的計算機程序產(chǎn)品。本文介紹的方法的進一步發(fā)展和改進從說明書中得出并在從屬權(quán)利要求中描述。
2、本發(fā)明的優(yōu)點
3、在雙軌車輛上在同一車軸上通常設(shè)有兩個車輪,每個車輪都可以轉(zhuǎn)向。每個車輪通常都分配有單獨的車輪轉(zhuǎn)向調(diào)節(jié)器。因此,車輛一般有兩個可相互獨立操作和可操控的單輪轉(zhuǎn)向調(diào)節(jié)器。
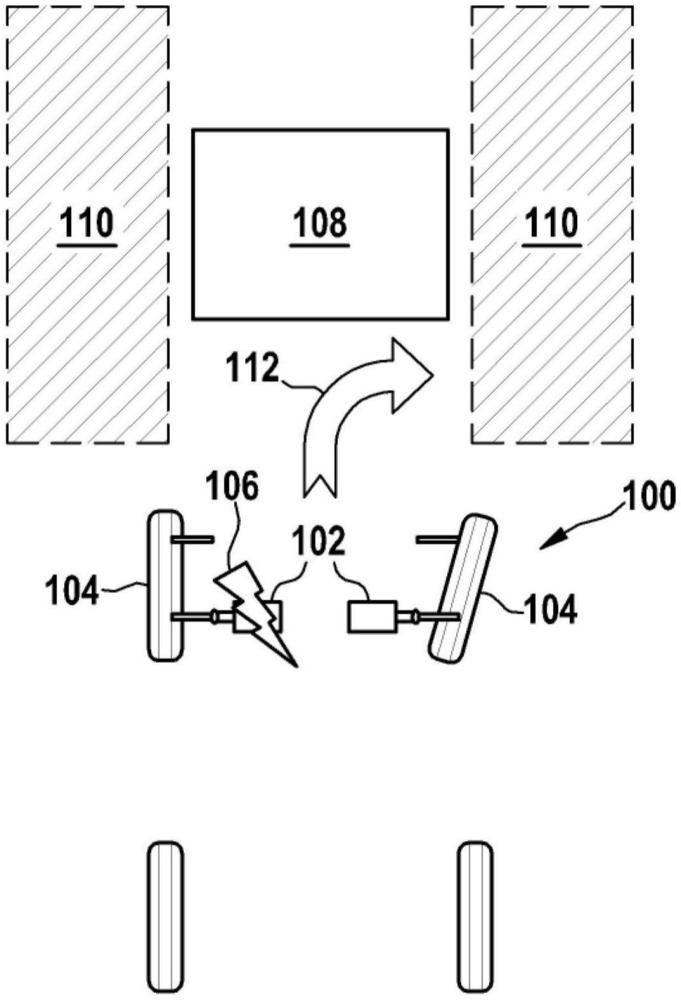
4、如果車輛的一個單輪轉(zhuǎn)向調(diào)節(jié)器有缺陷,車輛的轉(zhuǎn)向能力可能會受到限制。例如,車輛到一個方向上的轉(zhuǎn)向可能比到另一個方向上的轉(zhuǎn)向要少。因此,可能不再能夠不受限制地進行避讓以避免碰撞。
5、本文介紹的方法利用了這樣一個事實,即根據(jù)車輛行駛速度的不同,車輛更容易轉(zhuǎn)向有缺陷的一側(cè)或遠離有缺陷的一側(cè)。因此,在本文介紹的方法中,缺陷會被記錄下來,并在車輛的軌跡規(guī)劃中與車輛速度一起考慮。
6、通過本文介紹的方法可用于預(yù)先確定與當前速度相匹配的避讓方向。由此可以避免計劃的避讓軌跡無法實現(xiàn)。如果速度發(fā)生變化,避讓方向也會隨之改變。
7、介紹了一種用于運行單輪轉(zhuǎn)向調(diào)節(jié)器有缺陷的車輛的方法,其中,用于避免碰撞的轉(zhuǎn)向干預(yù)的避讓方向根據(jù)車輛的速度和/或橫向加速度以及缺陷一側(cè)來確定。
8、與本發(fā)明實施方式有關(guān)的構(gòu)思,除其他外,可視為基于下文所述的想法和認知。
9、帶有單輪轉(zhuǎn)向調(diào)節(jié)器的車輛可以在轉(zhuǎn)向軸上具有右側(cè)單輪轉(zhuǎn)向調(diào)節(jié)器和左側(cè)單輪轉(zhuǎn)向調(diào)節(jié)器。車輛還可以在多個車軸上具有單輪轉(zhuǎn)向調(diào)節(jié)器。每個單輪轉(zhuǎn)向調(diào)節(jié)器都作用于車輛的一個單獨的可轉(zhuǎn)向的車輪。單輪轉(zhuǎn)向制動器或轉(zhuǎn)向軸的車輪在轉(zhuǎn)向方面相互之間或與車輛的方向盤之間沒有機械耦合。單輪轉(zhuǎn)向調(diào)節(jié)器由方向盤或車輛轉(zhuǎn)向桿上的中央編碼器通過數(shù)據(jù)信號來操控。
10、如果其中一個單輪轉(zhuǎn)向調(diào)節(jié)器具有缺陷,另一個單輪轉(zhuǎn)向調(diào)節(jié)器通常不會受到影響。如果有缺陷,單輪轉(zhuǎn)向調(diào)節(jié)器可能完全失靈或僅具有有限的功能。如果單輪轉(zhuǎn)向調(diào)節(jié)器完全失靈,則其無法對車輪施加轉(zhuǎn)向扭矩或僅施加最小的轉(zhuǎn)向扭矩。有缺陷的單輪轉(zhuǎn)向調(diào)節(jié)器也可以對車輪施加很小的抑制(hemmendes)扭矩。如果單輪轉(zhuǎn)向調(diào)節(jié)器的功能受到限制,那么其例如可以對車輪施加較小的轉(zhuǎn)向扭矩和/或施加較小的調(diào)節(jié)速度。
11、如果單輪轉(zhuǎn)向調(diào)節(jié)器中的一個具有缺陷,則基本上只還能主動轉(zhuǎn)向與另一個單輪轉(zhuǎn)向調(diào)節(jié)器耦合的車輪。如果車輛在滾動,而帶有存在缺陷的單輪轉(zhuǎn)向調(diào)節(jié)器的車輪在自由滾動,或者車輪上只有較小的扭矩起作用,則帶有存在缺陷的單輪轉(zhuǎn)向調(diào)節(jié)器的車輪可通過其慣性運動(nachlauf)本身來定心,即基本上使其角度適應(yīng)車輛的運動方向。如果外部扭矩、如帶有存在缺陷的單輪轉(zhuǎn)向調(diào)節(jié)器的車輪上的驅(qū)動扭矩或制動扭矩超過了有缺陷的單輪轉(zhuǎn)向調(diào)節(jié)器的自定心扭矩和/或抑制扭矩,或者在定心力過低時通過完好的調(diào)節(jié)器將轉(zhuǎn)向角設(shè)定得過高,車輪就會折入,其角度就會偏離車輛的運動方向,即傾斜于或橫向于運動方向取向。
12、當車輛行駛時并且與功能正常的單輪轉(zhuǎn)向調(diào)節(jié)器耦合的車輪轉(zhuǎn)向,例如為了避開障礙物以防止碰撞的狹小轉(zhuǎn)向半徑可以根據(jù)車輛的速度更好地轉(zhuǎn)向有缺陷的單輪轉(zhuǎn)向調(diào)節(jié)器的一側(cè)或功能正常的單輪轉(zhuǎn)向調(diào)節(jié)器的一側(cè)。因此,可以根據(jù)速度選擇避讓方向。即使沒有出現(xiàn)車輛必須進行避讓的情況,也可根據(jù)速度連續(xù)確定避讓方向作為優(yōu)選避讓方向。避讓方向可以例如存儲在存儲器中,并且在需要進行避讓動作時讀出。存儲的避讓方向可根據(jù)速度而改變。
13、避讓方向還可以根據(jù)與碰撞對象的距離來確定。碰撞對象例如可以是車道或車輛軌跡上的靜止或緩慢行駛的車輛。碰撞對象例如可以是車輛前方交通堵塞末端的車輛。車輛同樣可以是突然降速的車輛,例如因意外剎車或發(fā)生事故。與碰撞對象的距離決定了成功避讓所需的彎道半徑。距離越小,則避讓時的彎道半徑必須越小或越窄。碰撞對象同樣可以是潛在的碰撞對象,即前方行駛的車輛。避讓方向可存儲在存儲器中,以備避讓時使用。
14、避讓方向可在速度低于閾值時被確定為遠離缺陷一側(cè)。另外,避讓方向也可以在距離大于距離值時被確定為遠離缺陷一側(cè)。“缺陷一側(cè)”或“有缺陷的單輪轉(zhuǎn)向調(diào)節(jié)器一側(cè)”應(yīng)理解為有缺陷的單輪轉(zhuǎn)向調(diào)節(jié)器所在的車輛側(cè)。在速度較低、彎道半徑較大的情況下,即較小的動態(tài)避讓動作時,彎道內(nèi)側(cè)的車輪確定車道(spurbestimmend),即確定車輛往哪行駛。而彎道外側(cè)的車輪則可以通過其慣性運動跟隨。如果距離足夠大,就有可能利用較大的彎道半徑避讓。例如,如果高于閾值和/或低于距離值,橫向加速度可超過4m/s2。
15、避讓方向可以在速度大于閾值時被確定為朝向缺陷一側(cè)。另外或附加地,避讓方向也可以在距離小于距離值時被確定為朝向缺陷一側(cè)。在速度較高和彎道半徑較小時,即在高動態(tài)避讓動作時,車輛開始搖擺(wanken),彎道外側(cè)車輪受載,而彎道內(nèi)側(cè)車輪去除載荷。因此,彎道外側(cè)車輪可以比彎道內(nèi)側(cè)車輪將更大的側(cè)向引導(dǎo)力傳遞到地面。因此,彎道外側(cè)車輪在高動態(tài)避讓動作時確定車道,并確定車輛往哪行駛。
16、如果在優(yōu)選避讓方向上所需的避讓空間被占用,則可將轉(zhuǎn)向干預(yù)歸類為不合適。避讓動作的避讓空間可以位于碰撞對象的右側(cè)或左側(cè)。特別是,避讓空間可以位于碰撞對象右側(cè)或左側(cè)的車道或緊急停靠車道。車輛的傳感器系統(tǒng)可以監(jiān)控車輛周圍的環(huán)境。傳感器系統(tǒng)可以監(jiān)控避讓空間。如果在避讓空間中識別到另一輛車或另一個障礙物,車輛在碰撞對象之前避讓到避讓空間時會造成另外的碰撞。如果在避讓空間中識別到另一輛車或另一個障礙物,則可以識別出避讓空間已被占用。這樣就可以防止另外的碰撞。對避讓空間的監(jiān)控可以連續(xù)進行,且避讓空間可以作為當前占用或當前空閑而存儲在存儲器中。
17、此外,還可以根據(jù)速度、可用的避讓空間和缺陷一側(cè)來設(shè)定為避免碰撞的制動干預(yù)的干預(yù)距離。干預(yù)距離可以是與碰撞對象的距離,從該距離開始觸發(fā)為避免碰撞的自動制動干預(yù)。如果識別到缺陷,干預(yù)距離可以增大。干預(yù)距離可隨速度增加而增大。如果識別到避讓空間被占用,則可進一步增大干預(yù)距離,以防止或至少減輕碰撞,即使沒有避讓。
18、該方法優(yōu)選由計算機實現(xiàn),且例如可以在軟件或硬件中實現(xiàn),也可以在軟件和硬件的混合形式中實現(xiàn),例如在駕駛員輔助系統(tǒng)中實現(xiàn)。
19、本文介紹的方法還創(chuàng)建了一種控制器,其中,控制器構(gòu)造用于在相應(yīng)的裝置中執(zhí)行、控制或?qū)崿F(xiàn)本文介紹的方法的變體步驟。
20、控制器可以是一種電氣設(shè)備,帶有至少一個用于處理信號或數(shù)據(jù)的計算單元、至少一個用于存儲信號或數(shù)據(jù)的存儲單元,以及至少一個用于讀入或輸出嵌入到通信協(xié)議中的數(shù)據(jù)的接口和/或通信接口。例如,計算單元可以是信號處理器、所謂的系統(tǒng)asic或微控制器,用于處理傳感器信號并根據(jù)傳感器信號輸出數(shù)據(jù)信號。存儲單元例如可以是閃存、eprom或磁性存儲單元。接口可構(gòu)造為傳感器接口,用于從傳感器讀入傳感器信號,和/或執(zhí)行器接口,用于向執(zhí)行器輸出數(shù)據(jù)信號和/或控制信號。通信接口可以構(gòu)造為無線和/或有線地讀入或輸出數(shù)據(jù)。例如,接口也可以是微控制器上與其他軟件模塊一起存在的軟件模塊。
21、帶有程序代碼的計算機程序產(chǎn)品或計算機程序也是有利的,它可以存儲在機器可讀的載體或存儲介質(zhì),如半導(dǎo)體存儲器、硬盤存儲器或光學(xué)存儲器上,用于執(zhí)行、實現(xiàn)和/或操控根據(jù)上述實施方式之一的方法步驟,特別是如果程序產(chǎn)品或程序在計算機、控制器或設(shè)備中實施。
22、需要注意的是,本發(fā)明的一些可能的特征和優(yōu)點在此參照不同的實施方式進行描述。本領(lǐng)域技術(shù)人員知曉,控制器和方法的特征可以適當?shù)亟M合、調(diào)整或互換,以達到本發(fā)明的其他實施方式。
- 還沒有人留言評論。精彩留言會獲得點贊!