一種無人機的慣性導航安裝結構的制作方法
本技術屬于慣性導航安裝,特別是涉及一種無人機的慣性導航安裝結構。
背景技術:
1、慣性導航是一種利用慣性測量裝置(如加速度計和陀螺儀)來測量物體的加速度和角速度,從而計算出物體的位置、速度和姿態的方法。這種導航系統不依賴外部信號,是一種自主導航方式,廣泛應用于航空、航海、航天以及其他需要高精度定位的領域。
2、無人機上常常會安裝慣性導航設備,以用于測量無人機的加速度和角速度。通過對這些數據進行處理,慣性導航系統可以計算出無人機的實時位置、速度和姿態。目前市面上存在一些慣性導航安裝結構,如中國專利網上公開了一種用于智能無人機的慣性導航安裝結構,其公告號為cn219237408u,這種安裝結構便于導航設備的快速安裝和拆卸,避免浪費工作人員檢修的時間,降低了工作人員的勞動強度,提高了工作人員的工作效率,有利于工作人員的使用,但是存在一些缺陷和不足有待改進:(1)現有的一些慣性導航設備在安裝到無人機上后,缺少有效的保護措施,當無人機飛行在樹林等較為復雜的環境中時,慣性導航設備容易因受到外部環境的摩擦和碰撞而受損,從而影響無人機的測量;(2)無人機在飛行過程中往往會產生較大的振動,而現有的一些慣性導航設備在安裝后,難以起到很好的減振效果,從而導致慣性導航系統產生顛簸和松動而影響其測量精度。因此,針對以上問題,本實用新型提供的一種無人機的慣性導航安裝結構具有重要意義。
技術實現思路
1、本實用新型提供了一種無人機的慣性導航安裝結構,通過保護殼可對慣性導航系統本體進行有效保護,從而有效避免了無人機飛行在樹林等較為復雜的環境中時,慣性導航系統本體受到外部環境的摩擦和碰撞而受損;通過各個減振件可有效減小慣性導航系統本體所受到的振動,以避免無人機在飛行過程中產生振動時,慣性導航系統本體產生顛簸和松動而影響其測量精度,綜上解決了背景技術中的問題。
2、為解決上述技術問題,本實用新型是通過以下技術方案實現的:
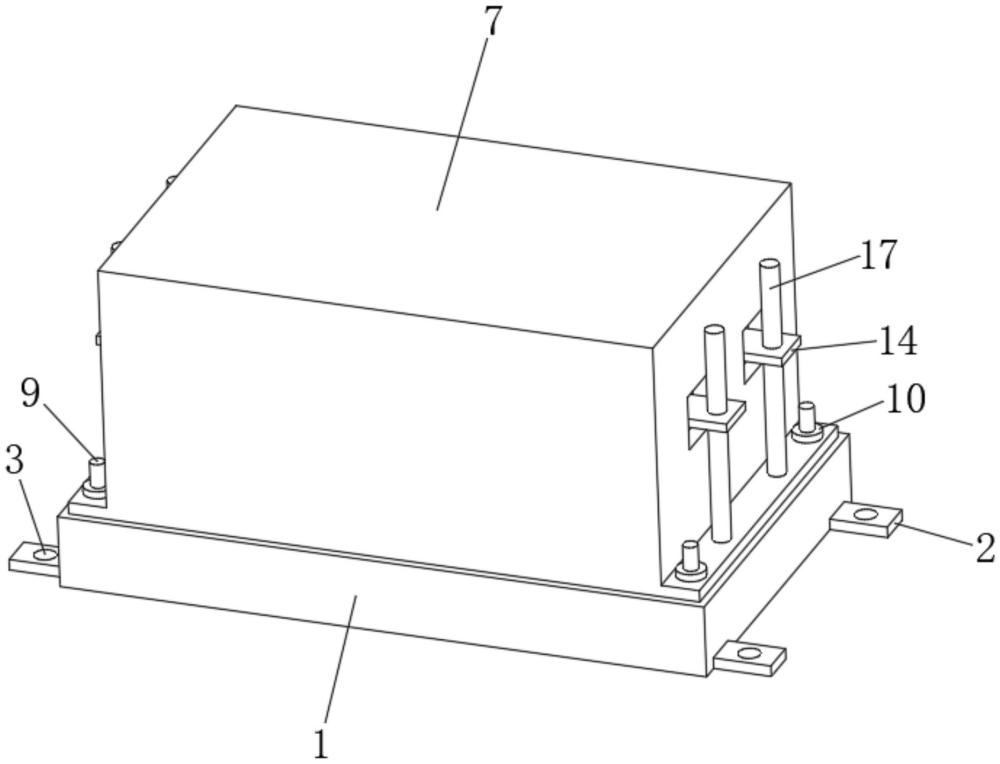
3、本實用新型的一種無人機的慣性導航安裝結構,包括安裝板,所述安裝板的兩側側壁均固定連接有若干個安裝座,每個所述安裝座上均開設有安裝孔,所述安裝板的表面開設有安裝槽,所述安裝槽內放置有慣性導航系統本體,所述慣性導航系統本體的兩側底端側壁均固定連接有凸塊,所述安裝板上安裝有保護殼,所述保護殼的兩側底端呈l形,并開設有若干個定位孔,且所述保護殼的兩側底端內壁均固定連接有定位塊,所述安裝板的頂部固定連接有若干個螺柱,所述螺柱與定位孔的數量相同,直徑對應相等,且每個所述螺柱的中心與每個定位孔的中心均一一對應,每個所述螺柱上均螺紋連接有與其相配合的螺母,所述保護殼的內部設置有若干個減振件;
4、每個所述減振件均包括減振板,所述減振板呈n字形,其內壁寬度與慣性導航系統本體的長度對應相等,且所述減振板的頂部固定連接有若干個彈簧,所述彈簧沿減振板的長度方向呈等距線性分布,其頂部固定連接在保護殼的頂部內壁。
5、進一步地,所述減振板的內壁表面設置有一層減振墊。
6、進一步地,所述減振板的兩側外壁均固定連接有活動塊,所述保護殼的兩側側壁均開設有若干個活動槽,所述活動槽為矩形,其數量與活動塊相同,且所述活動槽的槽寬與活動塊的寬度對應相等,所述活動塊穿過活動槽并延伸至保護殼外,且所述活動塊的表面開設有導孔,所述導孔內插入有導桿,所述導桿的底端固定連接在保護殼上。
7、進一步地,所述保護殼的內部設置有限位框,所述限位框為矩形,其內壁長度和寬度與慣性導航系統本體的長度和寬度對應相等,且所述限位框的兩側外壁與保護殼的內壁之間均固定連接有若干個固定塊。
8、進一步地,所述限位框的內壁表面設置有一層防磨圈。
9、進一步地,所述安裝槽的四個角處均固定連接有墊塊。
10、本實用新型相對于現有技術包括有以下有益效果:
11、(1)本實用新型中的一種無人機的慣性導航安裝結構在使用時,通過保護殼可對慣性導航系統本體進行有效保護,從而有效避免了無人機飛行在樹林等較為復雜的環境中時,慣性導航系統本體受到外部環境的摩擦和碰撞而受損;
12、(2)本實用新型中的一種無人機的慣性導航安裝結構在使用時,通過各個減振件可有效減小慣性導航系統本體所受到的振動,以避免無人機在飛行過程中產生振動時,慣性導航系統本體產生顛簸和松動而影響其測量精度。
13、當然,實施本實用新型的任一產品并不一定需要同時達到以上所述的所有優點。
技術特征:
1.一種無人機的慣性導航安裝結構,其特征在于,包括安裝板,所述安裝板的兩側側壁均固定連接有若干個安裝座,每個所述安裝座上均開設有安裝孔,所述安裝板的表面開設有安裝槽,所述安裝槽內放置有慣性導航系統本體,所述慣性導航系統本體的兩側底端側壁均固定連接有凸塊,所述安裝板上安裝有保護殼,所述保護殼的兩側底端呈l形,并開設有若干個定位孔,且所述保護殼的兩側底端內壁均固定連接有定位塊,所述安裝板的頂部固定連接有若干個螺柱,所述螺柱與定位孔的數量相同,直徑對應相等,且每個所述螺柱的中心與每個定位孔的中心均一一對應,每個所述螺柱上均螺紋連接有與其相配合的螺母,所述保護殼的內部設置有若干個減振件;
2.根據權利要求1所述的一種無人機的慣性導航安裝結構,其特征在于,所述減振板的內壁表面設置有一層減振墊。
3.根據權利要求1所述的一種無人機的慣性導航安裝結構,其特征在于,所述減振板的兩側外壁均固定連接有活動塊,所述保護殼的兩側側壁均開設有若干個活動槽,所述活動槽為矩形,其數量與活動塊相同,且所述活動槽的槽寬與活動塊的寬度對應相等,所述活動塊穿過活動槽并延伸至保護殼外,且所述活動塊的表面開設有導孔,所述導孔內插入有導桿,所述導桿的底端固定連接在保護殼上。
4.根據權利要求1所述的一種無人機的慣性導航安裝結構,其特征在于,所述保護殼的內部設置有限位框,所述限位框為矩形,其內壁長度和寬度與慣性導航系統本體的長度和寬度對應相等,且所述限位框的兩側外壁與保護殼的內壁之間均固定連接有若干個固定塊。
5.根據權利要求4所述的一種無人機的慣性導航安裝結構,其特征在于,所述限位框的內壁表面設置有一層防磨圈。
6.根據權利要求1所述的一種無人機的慣性導航安裝結構,其特征在于,所述安裝槽的四個角處均固定連接有墊塊。
技術總結
本技術公開了一種無人機的慣性導航安裝結構,包括安裝板,所述安裝板的兩側側壁均固定連接有若干個安裝座,每個所述安裝座上均開設有安裝孔,所述安裝板的表面開設有安裝槽,所述安裝槽內放置有慣性導航系統本體,所述慣性導航系統本體的兩側底端側壁均固定連接有凸塊,所述安裝板上安裝有保護殼,所述保護殼的兩側底端內壁均固定連接有定位塊,且所述保護殼的內部設置有若干個減振件。本技術可對慣性導航系統本體進行有效保護,以防止慣性導航系統本體受到外部環境的摩擦和碰撞而受損,可有效減小慣性導航系統本體所受到的振動,以防止慣性導航系統本體產生顛簸和松動而影響其測量精度。
技術研發人員:魏亮,游春,曾惠華,張耕悅
受保護的技術使用者:上海捷翔航空技術有限公司
技術研發日:20240807
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!