轉運系統的制作方法
本公開涉及離子治療領域,具體地涉及一種轉運系統。
背景技術:
1、在質子、重離子等離子治療設備中為實現精確放療,病人在受到離子束照射前需要進行精確的擺位。醫師或物理師在治療床上為病人進行擺位時,受到病人體位、病灶位置、束流線照射角度、人體組織的自然活動、病人的心理狀態等多方面因素的影響,通常需要消耗較多時間。而此擺位過程在治療室中進行,擺位既占用了寶貴的離子治療設備開機時間,又使得醫生和病患承受了不必要的輻射劑量,極大的影響了治療效率。此外,受限于離子的物理特性,使得mri和pet等高精度的成像設備無法布置在治療室內,也限制了術中放療等新技術的應用。
2、較低的離子治療設備有效使用時間使得病患的治療成本居高不下,為提高設備利用率減少治療費用,需要優化擺位流程并設計相關設備。
技術實現思路
1、鑒于上述問題,本公開提供了一種轉運系統。
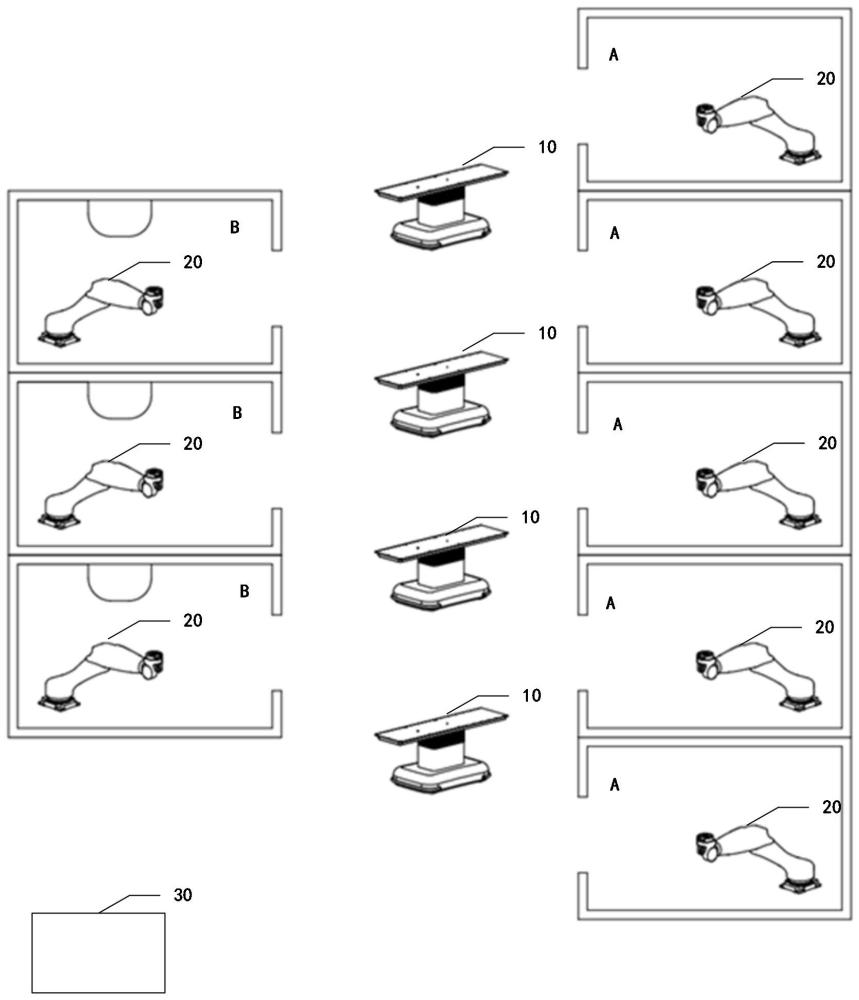
2、根據本公開的第一個方面,提供了一種轉運系統,包括:
3、轉運床,用于裝載轉運對象,并接收控制裝置發出的轉運指令,所述轉運對象為需要進行離子治療的對象;
4、機械臂,設置于第一空間和第二空間中,所述機械臂用于接收所述控制裝置發出的位置調整指令,所述位置調整指令用于將所述轉運床調整至目標位置,所述第一空間用于對轉運對象進行擺位,所述第二空間用于在所述目標位置對所述轉運對象進行離子治療,所述轉運對象相對于所述第一空間的位置與所述轉運對象相對所述第二空間的位置相同;
5、所述控制裝置,用于輸出所述轉運指令給所述轉運床,以及輸出所述位置調整指令給所述機械臂,所述轉運指令用于使裝載有擺位后的轉運對象的轉運床從所述第一空間轉移至所述第二空間。
6、在一些實施例中,所述轉運床包括:
7、床板,用于支撐所述轉運對象;
8、移動組件,與所述床板相連,用于接收所述轉運指令,使裝載有擺位后的轉運對象的床板從所述第一空間轉移至所述第二空間。
9、在一些實施例中,所述轉運床還包括:
10、第一轉換組件,設置于所述床板和所述移動組件之間,所述第一轉換組件用于使得所述床板與所述移動組件之間可卸式連接。
11、在一些實施例中,所述轉運床還包括:
12、減震組件,設置于所述第一轉換組件和所述移動組件之間,所述減震組件用于減輕所述床板的震動。
13、在一些實施例中,所述機械臂的末端設置有第二轉換組件;
14、所述第二轉換組件用于使得所述床板與所述機械臂之間可卸式連接。
15、在一些實施例中,第一轉換組件和所述第二轉換組件均包括基座和卡盤,所述基座具有槽口,所述槽口內設置有所述卡盤,所述卡盤用于在卡住的情況下與所述床板固定,在松開的情況下與所述床板脫開。
16、在一些實施例中,所述機械臂固定在第一空間內和/或第二空間內。
17、在一些實施例中,所述機械臂具有至少六個自由度。
18、在一些實施例中,所述機械臂包括:
19、底座,用于固定所述機械臂在所述第一空間和第二空間內的位置;
20、關節,用于使連接臂在三維空間進行運動;
21、所述連接臂,與所述關節相連,用于在三維空間進行運動。
22、在一些實施例中,所述床板在所述第一空間內相對離子束流的位置與所述床板在所述第二空間內相對離子束流的位置相同。
23、根據本公開實施例提供的轉運系統,可以至少實現以下技術效果:
24、(1)本公開采用的轉運床不需要復雜的傳感器和高精度定位裝置等,規避了轉運過程中電氣故障和控制系統出錯導致的問題,且結構簡單,便于維護。
25、(2)本公開采用機械臂進行精確定位的設計,將整體成本最高的機械臂數量與第二空間和第一空間數量相對應,數量較多的轉運床結構相對簡單,通過機械臂對床板的簡單高精度固定機構實現連接,減小了系統整體的復雜度。
26、(3)本公開使得擺位過程占用第二空間內寶貴的離子設備開機時間問題得到解決,極大的提高了治療效率從而減少人均治療費用,保證醫生、物理師、技師和轉運對象的安全,同時兼顧了整體外觀的完整性和美觀性。
27、(4)本公開可以適應不同大小的離子治療設備,且機械臂系統、轉運床的規格和數量也能夠調節,可以醫院的根據需要靈活調整。
28、(5)本公開還具備一定的治療量適應能力,可以通過調整轉運治療床的數量和路線、根據治療計劃修改與第一和第二空間的匹配關系、轉運對象的實際治療時間等適應醫院不同的工作狀態。
29、(6)本公開所涉及設備的整體獨立性很高,與周邊其他構件、設備的交界面較為簡單,且各設備體積也能做到很小,與臨近設備干涉情況少,極大減少了醫院層面應用現有基礎設施進行改造升級時的難度。
30、(7)本公開的應用使得第一空間和第二空間完全分離,可以減少術中放療和mri擺位等新技術的應用難度,同時轉運床也可以用于在醫院的其他位置,例如手術室和病房之間應用,提升醫院整體的智能化水平。
技術特征:
1.一種轉運系統,其特征在于,包括:
2.根據權利要求1所述的轉運系統,其特征在于,所述轉運床包括:
3.根據權利要求2所述的轉運系統,其特征在于,所述轉運床還包括:
4.根據權利要求2或3所述的轉運系統,其特征在于,所述轉運床還包括:
5.根據權利要求3所述的轉運系統,其特征在于,所述機械臂的末端設置有第二轉換組件;
6.根據權利要求5所述的轉運系統,其特征在于,第一轉換組件和所述第二轉換組件均包括基座和卡盤,所述基座具有槽口,所述槽口內設置有所述卡盤,所述卡盤用于在卡住的情況下與所述床板固定,在松開的情況下與所述床板脫開。
7.根據權利要求1所述的轉運系統,其特征在于,所述機械臂固定在第一空間內和/或第二空間內。
8.根據權利要求1所述的轉運系統,其特征在于,所述機械臂具有至少六個自由度。
9.根據權利要求1所述的轉運系統,其特征在于,所述機械臂包括:
10.根據權利要求2所述的轉運系統,其特征在于,所述床板在所述第一空間內相對離子束流的位置與所述床板在所述第二空間內相對離子束流的位置相同。
技術總結
本公開提供了一種轉運系統,可以應用于離子治療領域,包括:轉運床,用于裝載轉運對象,并接收控制裝置發出的轉運指令,轉運對象為需要進行離子治療的對象;機械臂,設置于第一空間和第二空間中,機械臂用于接收控制裝置發出的位置調整指令,位置調整指令用于將轉運床調整至目標位置,轉運對象相對于第一空間的位置與所運對象相對第二空間的位置相同,第一空間用于對轉運對象進行擺位,第二空間用于在目標位置對轉運對象進行離子治療;控制裝置,用于輸出轉運指令給轉運床,以及輸出位置調整指令給機械臂,轉運指令用于使裝載有擺位后的轉運對象的轉運床從第一空間轉移至第二空間。
技術研發人員:馬力禎,熊掀紅,朱新龍,張宗正,趙五元,王騰輝
受保護的技術使用者:蘭州泰基離子技術有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!