節(jié)氣門(mén)警報(bào)的觸發(fā)方法以及車(chē)輛與流程
本技術(shù)涉及車(chē)輛,并且更具體地,涉及車(chē)輛中一種節(jié)氣門(mén)警報(bào)的觸發(fā)方法以及車(chē)輛。
背景技術(shù):
1、節(jié)氣門(mén)是發(fā)動(dòng)機(jī)的重要組件,通過(guò)調(diào)節(jié)節(jié)氣門(mén)的開(kāi)度能夠?qū)崿F(xiàn)對(duì)發(fā)動(dòng)機(jī)進(jìn)氣量的控制。一旦節(jié)氣門(mén)發(fā)生卡滯,那么會(huì)導(dǎo)致節(jié)氣門(mén)的實(shí)際開(kāi)度無(wú)法跟隨需要達(dá)到的目標(biāo)開(kāi)度,進(jìn)氣量無(wú)法控制,車(chē)輛會(huì)出現(xiàn)非期望的扭矩提升或者下降。
2、相關(guān)技術(shù)中,一旦節(jié)氣門(mén)發(fā)生卡滯,就會(huì)觸發(fā)節(jié)氣門(mén)警報(bào),節(jié)氣門(mén)的驅(qū)動(dòng)電機(jī)被切斷,車(chē)輛動(dòng)力丟失進(jìn)入跛行狀態(tài)。
3、但是,直接觸發(fā)節(jié)氣門(mén)警報(bào)沒(méi)有考慮環(huán)境溫度對(duì)節(jié)氣門(mén)的驅(qū)動(dòng)電機(jī)的影響,也沒(méi)有給驅(qū)動(dòng)電機(jī)留有消除節(jié)氣門(mén)卡滯的時(shí)間。因此,如何合理地觸發(fā)節(jié)氣門(mén)警報(bào)是研究的熱點(diǎn)。
技術(shù)實(shí)現(xiàn)思路
1、本技術(shù)實(shí)施例提供了一種節(jié)氣門(mén)警報(bào)的觸發(fā)方法以及車(chē)輛,能夠更加合理地觸發(fā)節(jié)氣門(mén)警報(bào),技術(shù)方案如下:
2、一方面,提供了一種節(jié)氣門(mén)警報(bào)的觸發(fā)方法,所述方法包括:
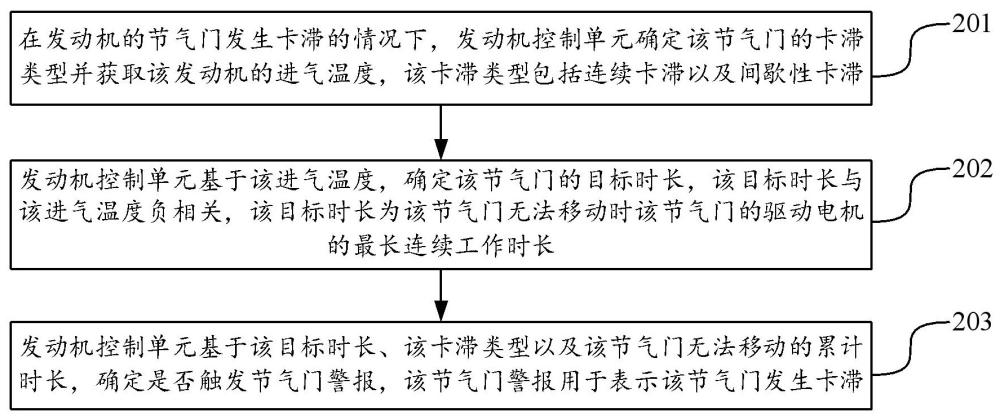
3、在發(fā)動(dòng)機(jī)的節(jié)氣門(mén)發(fā)生卡滯的情況下,確定所述節(jié)氣門(mén)的卡滯類(lèi)型并獲取所述發(fā)動(dòng)機(jī)的進(jìn)氣溫度,所述卡滯類(lèi)型包括連續(xù)卡滯以及間歇性卡滯;
4、基于所述進(jìn)氣溫度,確定所述節(jié)氣門(mén)的目標(biāo)時(shí)長(zhǎng),所述目標(biāo)時(shí)長(zhǎng)與所述進(jìn)氣溫度負(fù)相關(guān),所述目標(biāo)時(shí)長(zhǎng)為所述節(jié)氣門(mén)無(wú)法移動(dòng)時(shí)所述節(jié)氣門(mén)的驅(qū)動(dòng)電機(jī)的最長(zhǎng)連續(xù)工作時(shí)長(zhǎng);
5、基于所述目標(biāo)時(shí)長(zhǎng)、所述卡滯類(lèi)型以及所述節(jié)氣門(mén)無(wú)法移動(dòng)的累積時(shí)長(zhǎng),確定是否觸發(fā)節(jié)氣門(mén)警報(bào),所述節(jié)氣門(mén)警報(bào)用于表示所述節(jié)氣門(mén)發(fā)生卡滯。
6、在一種可能的實(shí)施方式中,所述在發(fā)動(dòng)機(jī)的節(jié)氣門(mén)發(fā)生卡滯的情況下,確定所述節(jié)氣門(mén)的卡滯類(lèi)型并獲取所述發(fā)動(dòng)機(jī)的進(jìn)氣溫度,包括:
7、在發(fā)動(dòng)機(jī)的節(jié)氣門(mén)發(fā)生卡滯的情況下,確定所述節(jié)氣門(mén)的位置變化情況;
8、基于所述節(jié)氣門(mén)的位置變化情況,確定所述節(jié)氣門(mén)的卡滯類(lèi)型;
9、獲取所述發(fā)動(dòng)機(jī)的進(jìn)氣溫度。
10、在一種可能的實(shí)施方式中,所述基于所述節(jié)氣門(mén)的位置變化情況,確定所述節(jié)氣門(mén)的卡滯類(lèi)型,包括:
11、在所述節(jié)氣門(mén)的位置變化情況指示所述節(jié)氣門(mén)未發(fā)生移動(dòng)的情況下,確定所述節(jié)氣門(mén)的卡滯類(lèi)型為連續(xù)卡滯;
12、在所述節(jié)氣門(mén)的位置變化情況指示所述節(jié)氣門(mén)發(fā)生間歇性移動(dòng)的情況下,確定所述節(jié)氣門(mén)的卡滯類(lèi)型為間歇性卡滯。
13、在一種可能的實(shí)施方式中,所述基于所述進(jìn)氣溫度,確定所述節(jié)氣門(mén)的目標(biāo)時(shí)長(zhǎng),包括:
14、采用所述進(jìn)氣溫度在第一關(guān)系表中進(jìn)行查詢(xún),得到所述目標(biāo)時(shí)長(zhǎng),所述第一關(guān)系表中存儲(chǔ)有多個(gè)候選進(jìn)氣溫度以及各個(gè)候選進(jìn)氣溫度對(duì)應(yīng)的候選時(shí)長(zhǎng);
15、或者,將所述進(jìn)氣溫度代入第一關(guān)系數(shù)據(jù),得到所述目標(biāo)時(shí)長(zhǎng),所述第一關(guān)系數(shù)據(jù)用于表示進(jìn)氣溫度與時(shí)長(zhǎng)之間的對(duì)應(yīng)關(guān)系;
16、或者,基于所述進(jìn)氣溫度和所述卡滯類(lèi)型,確定所述目標(biāo)時(shí)長(zhǎng)。
17、在一種可能的實(shí)施方式中,所述基于所述進(jìn)氣溫度和所述卡滯類(lèi)型,確定所述目標(biāo)時(shí)長(zhǎng),包括:
18、在所述卡滯類(lèi)型為連續(xù)卡滯的情況下,將所述進(jìn)氣溫度代入所述連續(xù)卡滯對(duì)應(yīng)的第二關(guān)系數(shù)據(jù),得到所述目標(biāo)時(shí)長(zhǎng),所述第二關(guān)系數(shù)據(jù)是在節(jié)氣門(mén)發(fā)生連續(xù)卡滯的情況下擬合得到的;在所述卡滯類(lèi)型為間歇性卡滯的情況下,將所述進(jìn)氣溫度代入所述間歇性卡滯對(duì)應(yīng)的第三關(guān)系數(shù)據(jù),得到所述目標(biāo)時(shí)長(zhǎng),所述第二關(guān)系數(shù)據(jù)和所述第三關(guān)系數(shù)據(jù)均用于表示進(jìn)氣溫度與時(shí)長(zhǎng)之間的對(duì)應(yīng)關(guān)系,所述第三關(guān)系數(shù)據(jù)是在節(jié)氣門(mén)發(fā)生間歇性卡滯的情況下擬合得到的;
19、或者,將所述進(jìn)氣溫度和所述卡滯類(lèi)型輸入時(shí)長(zhǎng)確定模型,通過(guò)所述時(shí)長(zhǎng)確定模型對(duì)所述進(jìn)氣溫度和所述卡滯類(lèi)型進(jìn)行特征提取,得到時(shí)長(zhǎng)預(yù)測(cè)特征;通過(guò)所述時(shí)長(zhǎng)確定模型,對(duì)所述時(shí)長(zhǎng)預(yù)測(cè)特征進(jìn)行映射,得到所述目標(biāo)時(shí)長(zhǎng)。
20、在一種可能的實(shí)施方式中,所述基于所述目標(biāo)時(shí)長(zhǎng)、所述卡滯類(lèi)型以及所述節(jié)氣門(mén)無(wú)法移動(dòng)的累積時(shí)長(zhǎng),確定是否觸發(fā)節(jié)氣門(mén)警報(bào),包括:
21、在所述卡滯類(lèi)型為連續(xù)卡滯的情況下,比較所述累積時(shí)長(zhǎng)和所述目標(biāo)時(shí)長(zhǎng);在所述累積時(shí)長(zhǎng)大于或等于所述目標(biāo)時(shí)長(zhǎng)的情況下,確定觸發(fā)所述節(jié)氣門(mén)警報(bào);在所述累積時(shí)長(zhǎng)小于所述目標(biāo)時(shí)長(zhǎng)的情況下,確定不觸發(fā)所述節(jié)氣門(mén)警報(bào);
22、在所述卡滯類(lèi)型為間歇性卡滯的情況下,比較所述累積時(shí)長(zhǎng)和所述目標(biāo)時(shí)長(zhǎng);在所述累積時(shí)長(zhǎng)大于或等于所述目標(biāo)時(shí)長(zhǎng)的情況下,將目標(biāo)計(jì)數(shù)器的計(jì)數(shù)值加一并重置所述節(jié)氣門(mén)無(wú)法移動(dòng)的累積時(shí)長(zhǎng);在所述目標(biāo)計(jì)數(shù)器的計(jì)數(shù)值大于或等于計(jì)數(shù)值閾值的情況下,確定觸發(fā)所述節(jié)氣門(mén)警報(bào);在所述目標(biāo)計(jì)數(shù)器的計(jì)數(shù)值小于所述計(jì)數(shù)值閾值的情況下,確定不觸發(fā)所述節(jié)氣門(mén)警報(bào)。
23、在一種可能的實(shí)施方式中,所述計(jì)數(shù)值閾值的確定方法包括:
24、采用所述進(jìn)氣溫度在第二關(guān)系表中進(jìn)行查詢(xún),得到所述計(jì)數(shù)值閾值,所述第二關(guān)系表中存儲(chǔ)有多個(gè)候選進(jìn)氣溫度以及各個(gè)候選進(jìn)氣溫度對(duì)應(yīng)的計(jì)數(shù)值閾值;
25、或者,將所述進(jìn)氣溫度代入第四關(guān)系數(shù)據(jù),得到所述計(jì)數(shù)值閾值,所述第四關(guān)系數(shù)據(jù)用于表示進(jìn)氣溫度與計(jì)數(shù)值閾值之間的對(duì)應(yīng)關(guān)系;
26、或者,基于所述進(jìn)氣溫度和所述卡滯類(lèi)型,確定所述計(jì)數(shù)值閾值。
27、在一種可能的實(shí)施方式中,所述方法還包括:
28、在所述節(jié)氣門(mén)無(wú)法移動(dòng)的累積時(shí)長(zhǎng)小于所述目標(biāo)時(shí)長(zhǎng)且所述節(jié)氣門(mén)卡滯消除的情況下,按照預(yù)設(shè)梯度降低所述節(jié)氣門(mén)無(wú)法移動(dòng)的累積時(shí)長(zhǎng),所述預(yù)設(shè)梯度與所述進(jìn)氣溫度相關(guān)聯(lián)。
29、在一種可能的實(shí)施方式中,所述方法還包括:
30、獲取所述節(jié)氣門(mén)的占空比;在所述占空比大于或等于占空比閾值的情況下,確定所述節(jié)氣門(mén)發(fā)生卡滯;在所述占空比小于所述占空比閾值的情況下,確定所述節(jié)氣門(mén)未發(fā)生卡滯;
31、或者,獲取所述節(jié)氣門(mén)的節(jié)氣門(mén)參數(shù)以及車(chē)輛的行駛參數(shù),所述節(jié)氣門(mén)參數(shù)用于表示所述節(jié)氣門(mén)的驅(qū)動(dòng)狀態(tài)和位置有效性,所述行駛參數(shù)用于表示所述車(chē)輛的行駛狀態(tài);在所述節(jié)氣門(mén)參數(shù)和所述行駛參數(shù)符合預(yù)設(shè)使能條件的情況下,執(zhí)行在發(fā)動(dòng)機(jī)的節(jié)氣門(mén)發(fā)生卡滯的情況下,確定所述節(jié)氣門(mén)的卡滯類(lèi)型并獲取所述發(fā)動(dòng)機(jī)的進(jìn)氣溫度的步驟。
32、一方面,提供了一種節(jié)氣門(mén)警報(bào)的觸發(fā)裝置,所述裝置包括:
33、類(lèi)型溫度確定模塊,用于在發(fā)動(dòng)機(jī)的節(jié)氣門(mén)發(fā)生卡滯的情況下,確定所述節(jié)氣門(mén)的卡滯類(lèi)型并獲取所述發(fā)動(dòng)機(jī)的進(jìn)氣溫度,所述卡滯類(lèi)型包括連續(xù)卡滯以及間歇性卡滯;
34、目標(biāo)時(shí)長(zhǎng)確定模塊,用于基于所述進(jìn)氣溫度,確定所述節(jié)氣門(mén)的目標(biāo)時(shí)長(zhǎng),所述目標(biāo)時(shí)長(zhǎng)與所述進(jìn)氣溫度負(fù)相關(guān),所述目標(biāo)時(shí)長(zhǎng)為所述節(jié)氣門(mén)無(wú)法移動(dòng)時(shí)所述節(jié)氣門(mén)的驅(qū)動(dòng)電機(jī)的最長(zhǎng)連續(xù)工作時(shí)長(zhǎng);
35、警報(bào)觸發(fā)確定模塊,用于基于所述目標(biāo)時(shí)長(zhǎng)、所述卡滯類(lèi)型以及所述節(jié)氣門(mén)無(wú)法移動(dòng)的累積時(shí)長(zhǎng),確定是否觸發(fā)節(jié)氣門(mén)警報(bào),所述節(jié)氣門(mén)警報(bào)用于表示所述節(jié)氣門(mén)發(fā)生卡滯。
36、在一種可能的實(shí)施方式中,所述類(lèi)型溫度確定模塊,用于在發(fā)動(dòng)機(jī)的節(jié)氣門(mén)發(fā)生卡滯的情況下,確定所述節(jié)氣門(mén)的位置變化情況;基于所述節(jié)氣門(mén)的位置變化情況,確定所述節(jié)氣門(mén)的卡滯類(lèi)型;獲取所述發(fā)動(dòng)機(jī)的進(jìn)氣溫度。
37、在一種可能的實(shí)施方式中,所述類(lèi)型溫度確定模塊,用于在所述節(jié)氣門(mén)的位置變化情況指示所述節(jié)氣門(mén)未發(fā)生移動(dòng)的情況下,確定所述節(jié)氣門(mén)的卡滯類(lèi)型為連續(xù)卡滯;在所述節(jié)氣門(mén)的位置變化情況指示所述節(jié)氣門(mén)發(fā)生間歇性移動(dòng)的情況下,確定所述節(jié)氣門(mén)的卡滯類(lèi)型為間歇性卡滯。
38、在一種可能的實(shí)施方式中,所述目標(biāo)時(shí)長(zhǎng)確定模塊,用于采用所述進(jìn)氣溫度在第一關(guān)系表中進(jìn)行查詢(xún),得到所述目標(biāo)時(shí)長(zhǎng),所述第一關(guān)系表中存儲(chǔ)有多個(gè)候選進(jìn)氣溫度以及各個(gè)候選進(jìn)氣溫度對(duì)應(yīng)的候選時(shí)長(zhǎng);或者,將所述進(jìn)氣溫度代入第一關(guān)系數(shù)據(jù),得到所述目標(biāo)時(shí)長(zhǎng),所述第一關(guān)系數(shù)據(jù)用于表示進(jìn)氣溫度與時(shí)長(zhǎng)之間的對(duì)應(yīng)關(guān)系;或者,基于所述進(jìn)氣溫度和所述卡滯類(lèi)型,確定所述目標(biāo)時(shí)長(zhǎng)。
39、在一種可能的實(shí)施方式中,所述目標(biāo)時(shí)長(zhǎng)確定模塊,用于在所述卡滯類(lèi)型為連續(xù)卡滯的情況下,將所述進(jìn)氣溫度代入所述連續(xù)卡滯對(duì)應(yīng)的第二關(guān)系數(shù)據(jù),得到所述目標(biāo)時(shí)長(zhǎng),所述第二關(guān)系數(shù)據(jù)是在節(jié)氣門(mén)發(fā)生連續(xù)卡滯的情況下擬合得到的;在所述卡滯類(lèi)型為間歇性卡滯的情況下,將所述進(jìn)氣溫度代入所述間歇性卡滯對(duì)應(yīng)的第三關(guān)系數(shù)據(jù),得到所述目標(biāo)時(shí)長(zhǎng),所述第二關(guān)系數(shù)據(jù)和所述第三關(guān)系數(shù)據(jù)均用于表示進(jìn)氣溫度與時(shí)長(zhǎng)之間的對(duì)應(yīng)關(guān)系,所述第三關(guān)系數(shù)據(jù)是在節(jié)氣門(mén)發(fā)生間歇性卡滯的情況下擬合得到的;或者,將所述進(jìn)氣溫度和所述卡滯類(lèi)型輸入時(shí)長(zhǎng)確定模型,通過(guò)所述時(shí)長(zhǎng)確定模型對(duì)所述進(jìn)氣溫度和所述卡滯類(lèi)型進(jìn)行特征提取,得到時(shí)長(zhǎng)預(yù)測(cè)特征;通過(guò)所述時(shí)長(zhǎng)確定模型,對(duì)所述時(shí)長(zhǎng)預(yù)測(cè)特征進(jìn)行映射,得到所述目標(biāo)時(shí)長(zhǎng)。
40、在一種可能的實(shí)施方式中,所述警報(bào)觸發(fā)確定模塊,用于在所述卡滯類(lèi)型為連續(xù)卡滯的情況下,比較所述累積時(shí)長(zhǎng)和所述目標(biāo)時(shí)長(zhǎng);在所述累積時(shí)長(zhǎng)大于或等于所述目標(biāo)時(shí)長(zhǎng)的情況下,確定觸發(fā)所述節(jié)氣門(mén)警報(bào);在所述累積時(shí)長(zhǎng)小于所述目標(biāo)時(shí)長(zhǎng)的情況下,確定不觸發(fā)所述節(jié)氣門(mén)警報(bào);在所述卡滯類(lèi)型為間歇性卡滯的情況下,比較所述累積時(shí)長(zhǎng)和所述目標(biāo)時(shí)長(zhǎng);在所述累積時(shí)長(zhǎng)大于或等于所述目標(biāo)時(shí)長(zhǎng)的情況下,將目標(biāo)計(jì)數(shù)器的計(jì)數(shù)值加一并重置所述節(jié)氣門(mén)無(wú)法移動(dòng)的累積時(shí)長(zhǎng);在所述目標(biāo)計(jì)數(shù)器的計(jì)數(shù)值大于或等于計(jì)數(shù)值閾值的情況下,確定觸發(fā)所述節(jié)氣門(mén)警報(bào);在所述目標(biāo)計(jì)數(shù)器的計(jì)數(shù)值小于所述計(jì)數(shù)值閾值的情況下,確定不觸發(fā)所述節(jié)氣門(mén)警報(bào)。
41、在一種可能的實(shí)施方式中,所述裝置還包括:
42、閾值確定模塊,用于采用所述進(jìn)氣溫度在第二關(guān)系表中進(jìn)行查詢(xún),得到所述計(jì)數(shù)值閾值,所述第二關(guān)系表中存儲(chǔ)有多個(gè)候選進(jìn)氣溫度以及各個(gè)候選進(jìn)氣溫度對(duì)應(yīng)的計(jì)數(shù)值閾值;或者,將所述進(jìn)氣溫度代入第四關(guān)系數(shù)據(jù),得到所述計(jì)數(shù)值閾值,所述第四關(guān)系數(shù)據(jù)用于表示進(jìn)氣溫度與計(jì)數(shù)值閾值之間的對(duì)應(yīng)關(guān)系;或者,基于所述進(jìn)氣溫度和所述卡滯類(lèi)型,確定所述計(jì)數(shù)值閾值。
43、在一種可能的實(shí)施方式中,所述裝置還包括:
44、累積時(shí)長(zhǎng)更新模塊,用于在所述節(jié)氣門(mén)無(wú)法移動(dòng)的累積時(shí)長(zhǎng)小于所述目標(biāo)時(shí)長(zhǎng)且所述節(jié)氣門(mén)卡滯消除的情況下,按照預(yù)設(shè)梯度降低所述節(jié)氣門(mén)無(wú)法移動(dòng)的累積時(shí)長(zhǎng),所述預(yù)設(shè)梯度與所述進(jìn)氣溫度相關(guān)聯(lián)。
45、在一種可能的實(shí)施方式中,所述裝置還包括:
46、卡滯判斷模塊,用于獲取所述節(jié)氣門(mén)的占空比;在所述占空比大于或等于占空比閾值的情況下,確定所述節(jié)氣門(mén)發(fā)生卡滯;在所述占空比小于所述占空比閾值的情況下,確定所述節(jié)氣門(mén)未發(fā)生卡滯;
47、或者,還包括使能條件判斷模塊,用于獲取所述節(jié)氣門(mén)的節(jié)氣門(mén)參數(shù)以及車(chē)輛的行駛參數(shù),所述節(jié)氣門(mén)參數(shù)用于表示所述節(jié)氣門(mén)的驅(qū)動(dòng)狀態(tài)和位置有效性,所述行駛參數(shù)用于表示所述車(chē)輛的行駛狀態(tài);在所述節(jié)氣門(mén)參數(shù)和所述行駛參數(shù)符合預(yù)設(shè)使能條件的情況下,執(zhí)行在發(fā)動(dòng)機(jī)的節(jié)氣門(mén)發(fā)生卡滯的情況下,確定所述節(jié)氣門(mén)的卡滯類(lèi)型并獲取所述發(fā)動(dòng)機(jī)的進(jìn)氣溫度的步驟。
48、一方面,提供了一種車(chē)輛,所述車(chē)輛包括一個(gè)或多個(gè)處理器和一個(gè)或多個(gè)存儲(chǔ)器,所述一個(gè)或多個(gè)存儲(chǔ)器中存儲(chǔ)有至少一條程序代碼,所述程序代碼由所述一個(gè)或多個(gè)處理器加載并執(zhí)行以實(shí)現(xiàn)所述節(jié)氣門(mén)警報(bào)的觸發(fā)方法所執(zhí)行的操作。
49、一方面,提供了一種計(jì)算機(jī)可讀存儲(chǔ)介質(zhì),所述計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)中存儲(chǔ)有至少一條程序代碼,所述程序代碼由處理器加載并執(zhí)行以實(shí)現(xiàn)所述節(jié)氣門(mén)警報(bào)的觸發(fā)方法所執(zhí)行的操作。
50、通過(guò)本技術(shù)實(shí)施例提供的技術(shù)方案,在發(fā)動(dòng)機(jī)的節(jié)氣門(mén)發(fā)生卡滯的情況下,確定節(jié)氣門(mén)的卡滯類(lèi)型并獲取發(fā)動(dòng)機(jī)的進(jìn)氣溫度。基于進(jìn)氣溫度來(lái)確定目標(biāo)時(shí)長(zhǎng),該目標(biāo)時(shí)長(zhǎng)用于在節(jié)氣門(mén)無(wú)法移動(dòng)時(shí)對(duì)節(jié)氣門(mén)的驅(qū)動(dòng)電機(jī)的連續(xù)工作時(shí)長(zhǎng)進(jìn)行限制。基于目標(biāo)時(shí)長(zhǎng)、卡滯類(lèi)型以及節(jié)氣門(mén)無(wú)法移動(dòng)的累積時(shí)長(zhǎng)來(lái)確定是否觸發(fā)節(jié)氣門(mén)警報(bào),盡可能推遲節(jié)氣門(mén)警報(bào)的觸發(fā)時(shí)間,保持車(chē)輛動(dòng)力的同時(shí)也給消除節(jié)氣門(mén)卡滯留有時(shí)間,節(jié)氣門(mén)的觸發(fā)時(shí)機(jī)更加合理。
- 用于長(zhǎng)期能量存儲(chǔ)的具有零污染...
- 一種風(fēng)機(jī)塔筒外表面巡檢機(jī)
- 一種基于數(shù)據(jù)分析的風(fēng)電機(jī)組性...
- 一種用于ORC系統(tǒng)的可靠性評(píng)...
- 一種柱塞泵馬達(dá)排量高頻響調(diào)節(jié)...
- 排氣閥門(mén)的控制方法、介質(zhì)、產(chǎn)...
- 發(fā)電機(jī)組運(yùn)行狀態(tài)的確定方法、...
- 一種風(fēng)電機(jī)組塔筒振動(dòng)監(jiān)測(cè)裝置...
- 一種VGT渦輪增壓發(fā)動(dòng)機(jī)運(yùn)行...
- 風(fēng)力發(fā)電機(jī)組的測(cè)試方法與流程
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!