一種套管-接箍子系統(tǒng)的共振松扣方法及系統(tǒng)與流程
所屬的技術(shù)人員知道,本發(fā)明可以實(shí)現(xiàn)為系統(tǒng)、方法或計(jì)算機(jī)程序產(chǎn)品,因此,本公開(kāi)可以具體實(shí)現(xiàn)為以下形式,即:可以是完全的硬件、也可以是完全的軟件(包括固件、駐留軟件、微代碼等),還可以是硬件和軟件結(jié)合的形式,本文一般稱為“電路”、“模塊”或“系統(tǒng)”。此外,在一些實(shí)施例中,本發(fā)明還可以實(shí)現(xiàn)為在一個(gè)或多個(gè)計(jì)算機(jī)可讀介質(zhì)中的計(jì)算機(jī)程序產(chǎn)品的形式,該計(jì)算機(jī)可讀介質(zhì)中包含計(jì)算機(jī)可讀的程序代碼。可以采用一個(gè)或多個(gè)計(jì)算機(jī)可讀的介質(zhì)的任意組合。計(jì)算機(jī)可讀介質(zhì)可以是計(jì)算機(jī)可讀信號(hào)介質(zhì)或者計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)。計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)例如可以是一一但不限于——電、磁、光、電磁、紅外線、或半導(dǎo)體的系統(tǒng)、裝置或器件,或者任意以上的組合。計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)的更具體的例子(非窮舉的列表)包括:具有一個(gè)或多個(gè)導(dǎo)線的電連接、便攜式計(jì)算機(jī)磁盤(pán)、硬盤(pán)、隨機(jī)存取存儲(chǔ)器(ram),只讀存儲(chǔ)器(rom)、可擦式可編程只讀存儲(chǔ)器(eprom或閃存)、光纖、便攜式緊湊磁盤(pán)只讀存儲(chǔ)器(cd-rom)、光存儲(chǔ)器件、磁存儲(chǔ)器件、或者上述的任意合適的組合。在本文件中,計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)可以是任何包含或存儲(chǔ)程序的有形介質(zhì),該程序可以被指令執(zhí)行系統(tǒng)、裝置或者器件使用或者與其結(jié)合使用。盡管上面已經(jīng)示出和描述了本發(fā)明的實(shí)施例,可以理解的是,上述實(shí)施例是示例性的,不能理解為對(duì)本發(fā)明的限制,本領(lǐng)域的普通技術(shù)人員在本發(fā)明的范圍內(nèi)可以對(duì)上述實(shí)施例進(jìn)行變化、修改、替換和變型。
背景技術(shù):
1、為了老井再次開(kāi)發(fā)利用或廢棄井封井作業(yè),主要步驟之一是去除已經(jīng)下入的油套管串。通常情況,套管長(zhǎng)度可達(dá)數(shù)百米甚至上千米,而傳統(tǒng)磨銑作業(yè)是利用套銑筒從井口逐步向下磨銑,效率極其低下,并且油套管被磨銑成廢料,失去二次使用價(jià)值,存在相當(dāng)程度的資源浪費(fèi)。目前,下入井中的套管串由多根套管以螺紋連接的形式組成,若在井口處采用扭力機(jī)反向扭轉(zhuǎn)卸扣,再輔之以拉拔工具,可直接起出套管;但由于套管在井下服役時(shí)間長(zhǎng),服役環(huán)境復(fù)雜,螺紋連接接箍處必然存在銹蝕、粘連,從而大大提高卸扣扭矩,甚至使卸扣扭矩大于扭力機(jī)最大載荷,從而導(dǎo)致無(wú)法卸扣。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明所要解決的技術(shù)問(wèn)題是針對(duì)現(xiàn)有技術(shù)的不足,具體針對(duì)無(wú)法松扣等問(wèn)題,具體提供了一種套管-接箍子系統(tǒng)的共振松扣方法及系統(tǒng),具體如下:
2、1)第一方面,本發(fā)明提供一種套管-接箍子系統(tǒng)的共振松扣方法,具體技術(shù)方案如下:
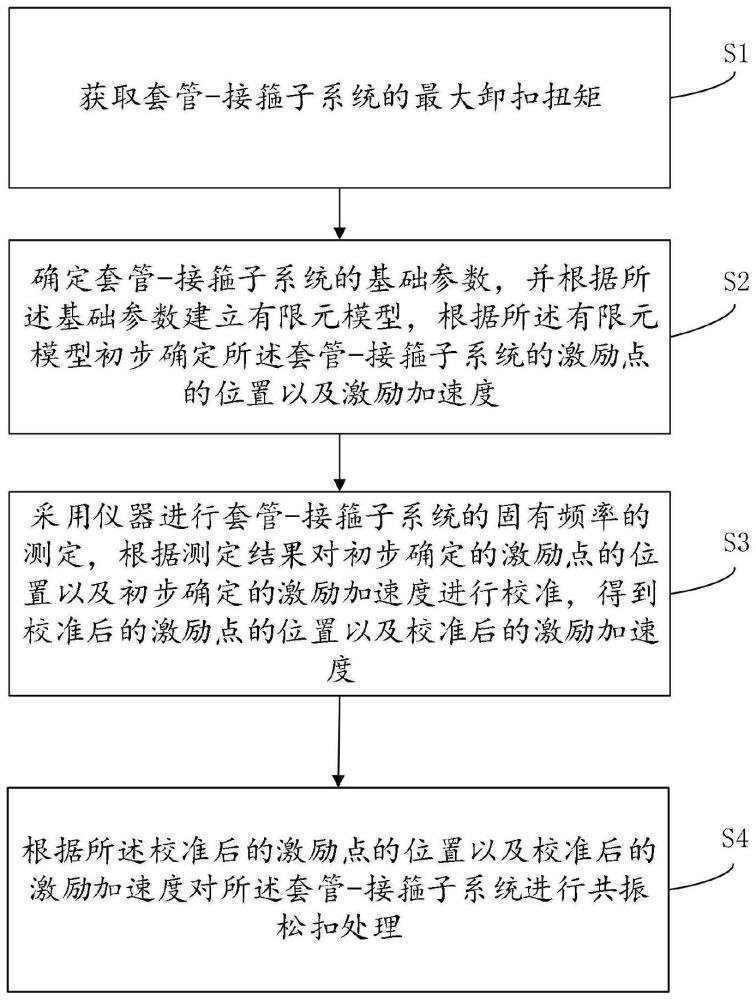
3、獲取套管-接箍子系統(tǒng)的最大卸扣扭矩;
4、確定套管-接箍子系統(tǒng)的基礎(chǔ)參數(shù),并根據(jù)所述基礎(chǔ)參數(shù)建立有限元模型,根據(jù)所述有限元模型初步確定所述套管-接箍子系統(tǒng)的激勵(lì)點(diǎn)的位置以及激勵(lì)加速度;
5、采用儀器進(jìn)行套管-接箍子系統(tǒng)的固有頻率的測(cè)定,根據(jù)測(cè)定結(jié)果對(duì)初步確定的激勵(lì)點(diǎn)的位置以及初步確定的激勵(lì)加速度進(jìn)行校準(zhǔn),得到校準(zhǔn)后的激勵(lì)點(diǎn)的位置以及校準(zhǔn)后的激勵(lì)加速度;
6、根據(jù)所述校準(zhǔn)后的激勵(lì)點(diǎn)的位置以及校準(zhǔn)后的激勵(lì)加速度對(duì)所述套管-接箍子系統(tǒng)進(jìn)行共振松扣處理。
7、本發(fā)明提供的一種套管-接箍子系統(tǒng)的共振松扣方法的有益效果如下:
8、通過(guò)一系列的仿真和試驗(yàn)手段,確定套管-接箍子系統(tǒng)系統(tǒng)的激勵(lì)加速度和激勵(lì)點(diǎn)位置,利用中/高頻激振設(shè)備在套管-接箍子系統(tǒng)中激發(fā)較大的共振振幅和加速度,使接箍處產(chǎn)生劇烈的橫向或縱向擺動(dòng),產(chǎn)生松扣的效果,從而顯著降低套管-接箍子系統(tǒng)的卸扣扭矩,保障高效率的卸扣。
9、在上述方案的基礎(chǔ)上,本發(fā)明還可以做如下改進(jìn)。
10、進(jìn)一步,所述獲取套管-接箍子系統(tǒng)的最大卸扣扭矩的方式為:
11、通過(guò)所述套管-接箍子系統(tǒng)的上扣扭矩確定所述套管-接箍子系統(tǒng)的最大卸扣扭矩。
12、進(jìn)一步,所述基礎(chǔ)參數(shù)包括:所述套管-接箍子系統(tǒng)的套管的鋼級(jí)、所述套管-接箍子系統(tǒng)的接箍處的扣型、所述套管-接箍子系統(tǒng)的套管的內(nèi)直徑以及所述套管-接箍子系統(tǒng)的套管的外直徑。
13、進(jìn)一步,采用儀器進(jìn)行套管-接箍子系統(tǒng)的固有頻率的測(cè)定,根據(jù)測(cè)定結(jié)果對(duì)初步確定的激勵(lì)點(diǎn)的位置以及初步確定的激勵(lì)加速度進(jìn)行校準(zhǔn),得到校準(zhǔn)后的激勵(lì)點(diǎn)的位置以及校準(zhǔn)后的激勵(lì)加速度具體包括:
14、通過(guò)激勵(lì)錘對(duì)所述套管-接箍子系統(tǒng)進(jìn)行測(cè)試,得到所述套管-接箍子系統(tǒng)的多階固有頻率,將所述多階固有頻率輸入至所述有限元模型,校準(zhǔn)并確定所述套管-接箍子系統(tǒng)的精確激勵(lì)點(diǎn)的位置以及精確激勵(lì)加速度,將校準(zhǔn)后獲得的所述精確激勵(lì)點(diǎn)的位置作為所述激勵(lì)點(diǎn)的位置,將校準(zhǔn)后獲得的所述精確激勵(lì)加速度作為激勵(lì)加速度進(jìn)行共振松扣處理。
15、2)第二方面,本發(fā)明還提供一種套管-接箍子系統(tǒng)的共振松扣系統(tǒng),具體技術(shù)方案如下:
16、獲取模塊用于:獲取套管-接箍子系統(tǒng)的最大卸扣扭矩;
17、確定模塊用于:確定套管-接箍子系統(tǒng)的基礎(chǔ)參數(shù),并根據(jù)所述基礎(chǔ)參數(shù)建立有限元模型,根據(jù)所述有限元模型初步確定所述套管-接箍子系統(tǒng)的激勵(lì)點(diǎn)的位置以及激勵(lì)加速度;
18、校準(zhǔn)模塊用于:采用儀器進(jìn)行套管-接箍子系統(tǒng)的固有頻率的測(cè)定,根據(jù)測(cè)定結(jié)果對(duì)初步確定的激勵(lì)點(diǎn)的位置以及初步確定的激勵(lì)加速度進(jìn)行校準(zhǔn),得到校準(zhǔn)后的激勵(lì)點(diǎn)的位置以及校準(zhǔn)后的激勵(lì)加速度;
19、處理模塊用于:根據(jù)所述校準(zhǔn)后的激勵(lì)點(diǎn)的位置以及校準(zhǔn)后的激勵(lì)加速度對(duì)所述套管-接箍子系統(tǒng)進(jìn)行共振松扣處理。
20、在上述方案的基礎(chǔ)上,本發(fā)明還可以做如下改進(jìn)。
21、進(jìn)一步,所述獲取套管-接箍子系統(tǒng)的最大卸扣扭矩的方式為:
22、通過(guò)所述套管-接箍子系統(tǒng)的上扣扭矩確定所述套管-接箍子系統(tǒng)的最大卸扣扭矩。
23、進(jìn)一步,所述基礎(chǔ)參數(shù)包括:所述套管-接箍子系統(tǒng)的套管的鋼級(jí)、所述套管-接箍子系統(tǒng)的接箍處的扣型、所述套管-接箍子系統(tǒng)的套管的內(nèi)直徑以及所述套管-接箍子系統(tǒng)的套管的外直徑。
24、進(jìn)一步,采用儀器進(jìn)行套管-接箍子系統(tǒng)的固有頻率的測(cè)定,根據(jù)測(cè)定結(jié)果對(duì)初步確定的激勵(lì)點(diǎn)的位置以及初步確定的激勵(lì)加速度進(jìn)行校準(zhǔn),得到校準(zhǔn)后的激勵(lì)點(diǎn)的位置以及校準(zhǔn)后的激勵(lì)加速度具體包括:
25、通過(guò)激勵(lì)錘對(duì)所述套管-接箍子系統(tǒng)進(jìn)行測(cè)試,得到所述套管-接箍子系統(tǒng)的多階固有頻率,將所述多階固有頻率輸入至所述有限元模型,校準(zhǔn)并確定所述套管-接箍子系統(tǒng)的精確激勵(lì)點(diǎn)的位置以及精確激勵(lì)加速度,將校準(zhǔn)后獲得的所述精確激勵(lì)點(diǎn)的位置作為所述激勵(lì)點(diǎn)的位置,將校準(zhǔn)后獲得的所述精確激勵(lì)加速度作為激勵(lì)加速度進(jìn)行共振松扣處理。
26、需要說(shuō)明的是,本發(fā)明的第二方面的技術(shù)方案及對(duì)應(yīng)的可能的實(shí)現(xiàn)方式所取得的有益效果,可以參見(jiàn)上述對(duì)第一方面及其對(duì)應(yīng)的可能的實(shí)現(xiàn)方式的技術(shù)效果,此處不再贅述。
技術(shù)特征:
1.一種套管-接箍子系統(tǒng)的共振松扣方法,其特征在于,包括:
2.根據(jù)權(quán)利要求1所述的一種套管-接箍子系統(tǒng)的共振松扣方法,其特征在于,所述獲取套管-接箍子系統(tǒng)的最大卸扣扭矩的方式為:
3.根據(jù)權(quán)利要求1所述的一種套管-接箍子系統(tǒng)的共振松扣方法,其特征在于,所述基礎(chǔ)參數(shù)包括:所述套管-接箍子系統(tǒng)的套管的鋼級(jí)、所述套管-接箍子系統(tǒng)的接箍處的扣型、所述套管-接箍子系統(tǒng)的套管的內(nèi)直徑以及所述套管-接箍子系統(tǒng)的套管的外直徑。
4.根據(jù)權(quán)利要求1-3任一項(xiàng)所述的一種套管-接箍子系統(tǒng)的共振松扣方法,其特征在于,采用儀器進(jìn)行套管-接箍子系統(tǒng)的固有頻率的測(cè)定,根據(jù)測(cè)定結(jié)果對(duì)初步確定的激勵(lì)點(diǎn)的位置以及初步確定的激勵(lì)加速度進(jìn)行校準(zhǔn),得到校準(zhǔn)后的激勵(lì)點(diǎn)的位置以及校準(zhǔn)后的激勵(lì)加速度具體包括:
5.一種套管-接箍子系統(tǒng)的共振松扣系統(tǒng),其特征在于,包括:
6.根據(jù)權(quán)利要求5所述的一種套管-接箍子系統(tǒng)的共振松扣系統(tǒng),其特征在于,所述獲取套管-接箍子系統(tǒng)的最大卸扣扭矩的方式為:
7.根據(jù)權(quán)利要求5所述的一種套管-接箍子系統(tǒng)的共振松扣系統(tǒng),其特征在于,所述基礎(chǔ)參數(shù)包括:所述套管-接箍子系統(tǒng)的套管的鋼級(jí)、所述套管-接箍子系統(tǒng)的接箍處的扣型、所述套管-接箍子系統(tǒng)的套管的內(nèi)直徑以及所述套管-接箍子系統(tǒng)的套管的外直徑。
8.根據(jù)權(quán)利要求5-7任一項(xiàng)所述的一種套管-接箍子系統(tǒng)的共振松扣系統(tǒng),其特征在于,采用儀器進(jìn)行套管-接箍子系統(tǒng)的固有頻率的測(cè)定,根據(jù)測(cè)定結(jié)果對(duì)初步確定的激勵(lì)點(diǎn)的位置以及初步確定的激勵(lì)加速度進(jìn)行校準(zhǔn),得到校準(zhǔn)后的激勵(lì)點(diǎn)的位置以及校準(zhǔn)后的激勵(lì)加速度具體包括:
技術(shù)總結(jié)
本發(fā)明涉及工裝技術(shù)領(lǐng)域,尤其涉及一種套管?接箍子系統(tǒng)的共振松扣方法及系統(tǒng)。該方法包括:獲取套管?接箍子系統(tǒng)的上扣扭矩,根據(jù)所述上扣扭矩確定最大松扣扭矩;確定套管?接箍的基礎(chǔ)參數(shù),并根據(jù)所述基礎(chǔ)參數(shù)建立有限元模型,根據(jù)所述有限元模型開(kāi)展模態(tài)仿真分析和試驗(yàn)測(cè)試,確定所述套管?接箍子系統(tǒng)的固有頻率、激勵(lì)點(diǎn)的位置以及激勵(lì)加速度;根據(jù)所述激勵(lì)點(diǎn)以及激勵(lì)加速度,采用中/高頻激振設(shè)備對(duì)所述套管?接箍子系統(tǒng)施加所述固有頻率下的振動(dòng)激勵(lì),在套管?接箍子系統(tǒng)中激發(fā)出較大的共振振幅和共振加速度,使接箍處產(chǎn)生劇烈的橫向或縱向擺動(dòng),產(chǎn)生松扣的效果,顯著降低套管?接箍子系統(tǒng)的松扣扭矩,保障高效率的卸扣。
技術(shù)研發(fā)人員:黨寧,楊尚諭,韓禮紅,王建軍,李方坡,牟易升
受保護(hù)的技術(shù)使用者:中國(guó)石油天然氣集團(tuán)有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!