基于改進粒子群算法的路徑規劃方法及存儲介質與流程
本發明涉及路徑規劃,尤其涉及一種基于改進粒子群算法的路徑規劃方法及存儲介質。
背景技術:
1、自動引導車(automated?guided?vehicle,agv)具有高度靈活、自動化程度高等優點,在制造業、倉儲物流、港口碼頭等領域的需求不斷增長。路徑規劃技術作為agv規劃調度的關鍵一環,能夠讓agv小車更快完成任務,在節約運輸成本、提高用戶滿意度、增加企業利潤等方面發揮重要作用,受到了眾多科研機構、企業、高校的關注。
2、路徑規劃是機器人領域中的關鍵技術,旨在尋找從起點到終點的無碰撞最優路徑。根據已有信息的不同,路徑規劃可分為全局路徑規劃與局部路徑規劃。前者是在全局環境已知狀態下,規劃機器人的運動路線,而后者更側重于考慮機器人當前所處位置的局部信息,讓機器人具有良好的避障能力。因此,在實際應用中常將兩者結合使用,以獲取最佳路徑。
3、傳統的路徑規劃算法包括幾何搜索算法、基于采樣的路徑規劃算法等。dijkstra算法、算法等幾何搜索算法雖然能夠保證獲取最短路徑,但在實際應用中受環境范圍影響可能出現計算成本高、效率低下、難以適應動態環境等問題。基于采樣的路徑規劃算法,如快速搜索隨機數(rrt)、算法、prm算法等,能以較快速度生成起點與終點之間的可行路徑,但可能不是最優路徑。
4、此外,智能算法也被應用于路徑規劃。其中,遺傳算法具備較好地收斂性和全局搜索能力,但局部搜索能力較差,并容易陷入局部最優。粒子群算法結構簡單、容易實現,但也較易陷入局部最優。蟻群算法面對較為復雜的狀態空間時容易陷入局部最優,并且實時性難以保證。
技術實現思路
1、本發明所要解決的技術問題是:提供一種基于改進粒子群算法的路徑規劃方法及存儲介質,能夠提高路徑規劃的計算效率,且能夠應用于具有移動障礙物的環境。
2、為了解決上述技術問題,本發明采用的技術方案為:一種基于改進粒子群算法的路徑規劃方法,包括:
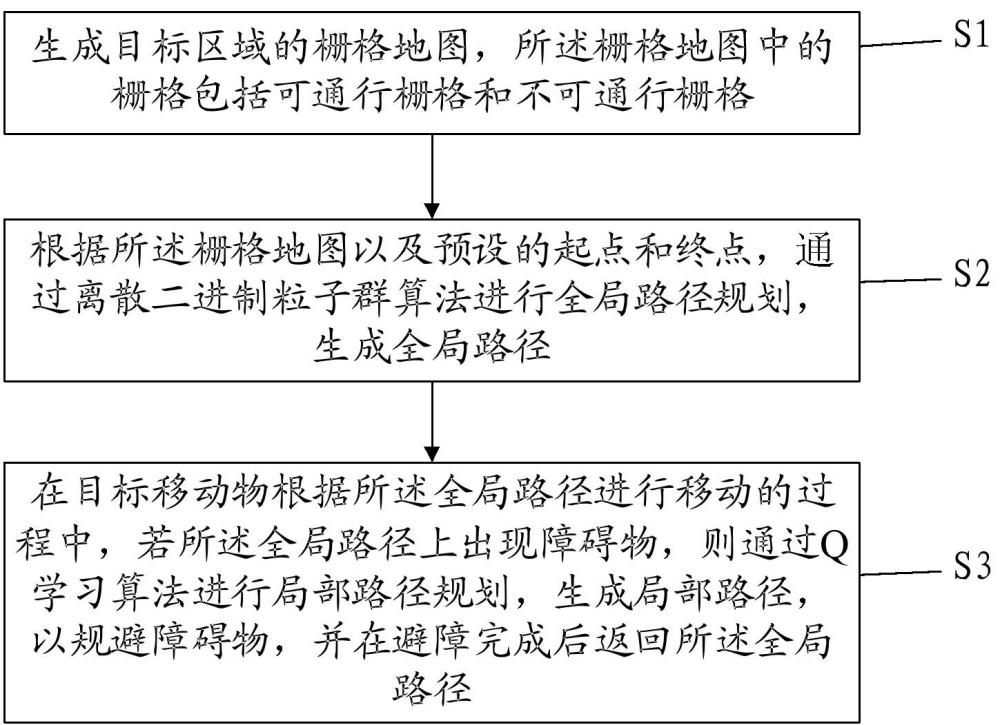
3、生成目標區域的柵格地圖,所述柵格地圖中的柵格包括可通行柵格和不可通行柵格;
4、根據所述柵格地圖以及預設的起點和終點,通過離散二進制粒子群算法進行全局路徑規劃,生成全局路徑;
5、在目標移動物根據所述全局路徑進行移動的過程中,若所述全局路徑上出現障礙物,則通過q學習算法進行局部路徑規劃,生成局部路徑,以規避障礙物,并在避障完成后返回所述全局路徑。
6、本發明還提出一種計算機可讀存儲介質,其上存儲有計算機程序,所述程序被處理器執行時實現如上所述的方法。
7、本發明的有益效果在于:通過bpso算法(離散二進制粒子群算法)進行全局路徑規劃,并當在移動過程中遇到障礙物時通過q-learning算法(q學習算法)進行局部路徑規劃,可以幫助機器人在復雜環境中找到從起點到終點的最優路徑,且能夠應用于具有移動障礙物的環境,同時保證計算效率的高效性。
技術特征:
1.一種基于改進粒子群算法的路徑規劃方法,其特征在于,包括:
2.根據權利要求1所述的路徑規劃方法,其特征在于,所述生成目標區域的柵格地圖,包括:
3.根據權利要求1所述的路徑規劃方法,其特征在于,所述離散二進制粒子群算法包括:
4.根據權利要求3所述的路徑規劃方法,其特征在于,所述目標函數為:
5.根據權利要求3所述的路徑規劃方法,其特征在于,粒子的速度更新公式為:
6.根據權利要求1所述的路徑規劃方法,其特征在于,所述在目標移動物根據所述全局路徑進行移動的過程中,若所述全局路徑上出現障礙物,則通過q學習算法進行局部路徑規劃,生成局部路徑,以規避障礙物,并在避障完成后返回所述全局路徑,包括:
7.根據權利要求1所述的路徑規劃方法,其特征在于,所述q學習算法包括:
8.根據權利要求7所述的路徑規劃方法,其特征在于,所述q值更新公式為:
9.根據權利要求7所述的路徑規劃方法,其特征在于,所述獎勵函數為:
10.一種計算機可讀存儲介質,其上存儲有計算機程序,其特征在于,所述程序被處理器執行時實現如權利要求1-9任一項所述的方法。
技術總結
本發明公開了一種基于改進粒子群算法的路徑規劃方法及存儲介質,方法包括:生成目標區域的柵格地圖,所述柵格地圖中的柵格包括可通行柵格和不可通行柵格;根據所述柵格地圖以及預設的起點和終點,通過離散二進制粒子群算法進行全局路徑規劃,生成全局路徑;在目標移動物根據所述全局路徑進行移動的過程中,若所述全局路徑上出現障礙物,則通過Q學習算法進行局部路徑規劃,生成局部路徑,以規避障礙物,并在避障完成后返回所述全局路徑。本發明能夠提高路徑規劃的計算效率,且能夠應用于具有移動障礙物的環境。
技術研發人員:楊鴻武,林詩薇,盧嘉祺,吳新星
受保護的技術使用者:廈門通士達有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!