基于雙目線激光的在線高反光物料三維測量方法與流程
本發(fā)明涉及相機檢測,具體是指一種基于雙目線激光的在線高反光物料三維測量方法。
背景技術:
1、刀具工業(yè)生產(chǎn)過程中金屬棒料加工是必不可少的,加工后的金屬棒料長度和直徑是否控制在誤差范圍內(nèi)是工業(yè)檢測的重要環(huán)節(jié)。現(xiàn)有工業(yè)生產(chǎn)過程中多采人工去測量,費時、費力、費錢;接觸式檢測技術如三坐標測量機,不僅造價高,且需人工操作,檢測效率低;非接觸式測量方法如正弦結構光三維測量技術和線激光測量技術,但兩者對反光材料的測量效果均不理想;其中,基于線結構光的三維測量系統(tǒng)因其具有結構簡明、非接觸、高精度的特性,其解決很多諸如視場不足、異物遮擋造成的點云缺失問題,因此,在產(chǎn)品檢測和逆向工程等多個方向上得到廣泛應用,但是在高反光物體的三維重建中存在很多問題,如過曝區(qū)域點云數(shù)據(jù)缺失、定向反光的工件在特定角度下反光弱造成的數(shù)據(jù)缺失問題;其中,線激光檢測設備對于高反光件測量多采用降低曝光時間的方法,但是降低曝光時間的方法并不能應用同時存在高反和低反射的測量場景中,
2、在定向反光工件的測量中,雙目相機結合線激光來從不同角度進行拍攝,再將點云融合也能一定程度上消除反光帶來的影響,如cn202210648000.7?一種基于線激光振鏡掃描的雙目三維重建方法及系統(tǒng)中,提出了通過多個角度的單條線激光投射和雙目相機采集圖像對,提取激光光條圖像中的激光中心線,利用立體視覺的極線約束與激光中心線之間的特征搜索出激光光條圖像對中的對應匹配點;基于激光光條圖像對中的對應匹配點實現(xiàn)三維重建,該重建方法一定程度上減少測量過程中的測量信息損失,但是操作繁瑣,重建效率低,融合誤差大,準確度不足。
3、因此,如何準確和快速的測量反光金屬棒料長度和直徑問題關乎自動化產(chǎn)線的生產(chǎn)效率,研究能夠應用于生產(chǎn)線的在線高反光物料高度與直徑檢測技術的意義重大。
技術實現(xiàn)思路
1、本發(fā)明的目的在于克服現(xiàn)有技術中的缺陷,提供一種基于雙目線激光的在線高反光物料三維測量方法,以在一定程度上克服由于相關技術的限制和缺陷而導致的一個或者多個問題。
2、為了實現(xiàn)上述目的,本發(fā)明的技術方案如下:
3、一種基于雙目線激光的在線高反光物料三維測量方法,基于帶有雙目線激光三維掃描系統(tǒng)的測量系統(tǒng),三維測量方法包括以下步驟:
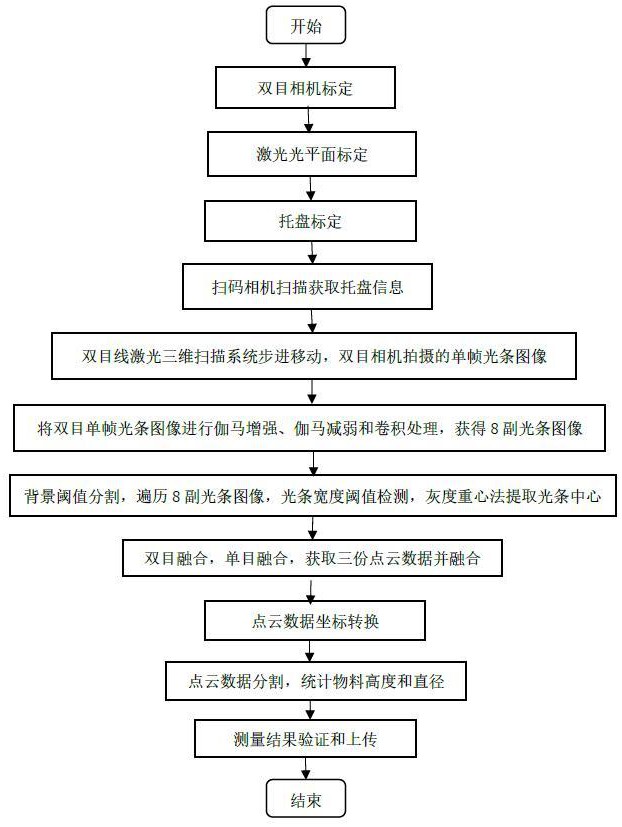
4、步驟一:首次在測量系統(tǒng)上搭建雙目線激光三維掃描系統(tǒng)時,建立世界坐標系,對雙目線激光三維掃描系統(tǒng)進行標定;
5、步驟二:將雙目線激光三維掃描系統(tǒng)定位至物料的正上方,雙目線激光三維掃描系統(tǒng)的雙目相機同時拍攝,分別獲得左激光條圖像和右激光條圖像;
6、步驟三:將左激光條圖像和右激光條圖像分別進行伽馬增強、伽馬減弱和卷積處理,分別獲得三幅左變換圖像和三幅右變換圖像;
7、步驟四:對左激光條圖像、左變換圖像、右變換圖像和右激光條圖像分別進行閥值分割,獲得閥值分割圖,遍歷8幅閥值分割圖,使用灰度重心法提取滿足光條寬度閥值的光條中心點,獲得8幅圖像的光條中心點數(shù)據(jù);
8、步驟五:將8幅圖像的光條中心點數(shù)據(jù)融合和坐標轉換,獲取物料在世界坐標系下的單幀三維數(shù)據(jù);
9、步驟六:統(tǒng)計和計算物料的三維結構尺寸。
10、進一步地,步驟五中的融合包括以下內(nèi)容:雙目融合:將4幅左側圖像的光條中心點數(shù)據(jù)融合,將4幅右側圖像的光條中心點數(shù)據(jù)融合,獲取左融合點數(shù)據(jù)和右融合點數(shù)據(jù),利用雙目線激光三維掃描系統(tǒng)的標定數(shù)據(jù)結合極線約束,將左融合點數(shù)據(jù)和右融合點數(shù)據(jù)進行匹配,生成世界坐標下下的點云數(shù)據(jù)p1;
11、單目融合:利用雙目線激光三維掃描系統(tǒng)的標定數(shù)據(jù),根據(jù)激光三角法使用左融合點數(shù)據(jù)生成左融合點云數(shù)據(jù)并進行坐標轉換,獲得世界坐標系下的點云數(shù)據(jù)p2,同樣地,使用右融合點數(shù)據(jù)生成右融合點云數(shù)據(jù)并進行坐標轉換,獲得世界坐標系下的點云數(shù)據(jù)p3;
12、單幀三維數(shù)據(jù):將p1、p2和p3直接融合獲得。
13、進一步地,測量系統(tǒng)包括運動裝置以及托盤,托盤上設置有若干物料定位孔,雙目線激光三維掃描系統(tǒng)設置于運動裝置上,運動裝置驅動雙目線激光三維掃描系統(tǒng)相對于托盤平移。
14、進一步地,雙目線激光三維掃描系統(tǒng)的標定包括相機標定和光平面標定;標定步驟包括:
15、s1、建立世界坐標系,激光光平面垂直于托盤平面并平行于托盤邊緣,靶標位于托盤平面上,以靶標位置建立世界坐標系,激光光平面平行于靶標的x向;
16、s2、相機標定,采用張正友標定法標定雙目相機,確定雙目相機的畸變參數(shù)、內(nèi)參和外參,并修正相機畸變;
17、s3、打開雙目線激光三維掃描系統(tǒng)的線激光器,雙目相機拍攝靶標,利用靶標的世界坐標系和步驟s2中的標定結果,結合極線約束生成靶標的三維數(shù)據(jù),變換靶標姿態(tài),獲取多組三維數(shù)據(jù),通過多組三維數(shù)據(jù)擬合平面方程,即為世界坐標系下的光平面方程。
18、進一步地,托盤更換后,步驟一中還包括托盤標定,建立光條在世界坐標系下的三維信息數(shù)據(jù)與托盤坐標的轉換關系。
19、進一步地,伽馬增強處理中的γ1取0.7,伽馬減弱處理中的γ2取1.53。
20、進一步地,測量系統(tǒng)還包括掃碼相機,托盤上設置有二維碼,用于標記托盤上各個定位孔信息和測量系統(tǒng)還包括掃碼相機,托盤上設置有二維碼,用于標記托盤上各個物料定位孔的分布信息和物料信息,步驟六中還包括將單幀三維數(shù)據(jù)轉換成托盤坐標系下的結構三維數(shù)據(jù),根據(jù)物料定位孔的分布信息對結構三維數(shù)據(jù)進行數(shù)據(jù)分割,統(tǒng)計和計算物料的三維結構尺寸。
21、進一步地,還包括驗證步驟,其包含以下內(nèi)容:根據(jù)物料定位孔的分布信息和物料信息,判斷物料擺放順序是否正確;根據(jù)物料信息,判斷物料加工后的測量結果是否滿足結構尺寸要求。
22、與現(xiàn)有技術相比,本發(fā)明的基于雙目線激光的在線高反光物料三維測量方法具有以下的有益效果:
23、1、通過雙目線激光三維掃描系統(tǒng)拍攝單幀激光條圖像,分別進行伽馬增強、伽馬減弱和卷積圖像增強變換,來獲取高亮度、低亮度、線條增強圖片,有助于獲取更多的高反光區(qū)域和低反射區(qū)域的點云數(shù)據(jù),高反光和低反射場景下物料三維結構的重建效果更好,高反射區(qū)域的點云數(shù)據(jù)缺失更少,測量精度更高,與三坐標測量方法對比結果證明,該測量方法的測量精度滿足尺寸測量精度要求;
24、2、中心提取算法結合了閥值分割和寬度閥值約束,對于高反光區(qū)域不進行中心提取,利于獲得精確度更高的光條中心數(shù)據(jù),融合8幅圖像的光條中心的點云數(shù)據(jù),兼顧提取精度和點云數(shù)據(jù)完整度;
25、3、使用光平面與左右相機構成兩套單目線激光系統(tǒng)生成兩份單目點云數(shù)據(jù),左右相機構成的雙目線激光系統(tǒng)來生成一份雙目點云數(shù)據(jù),點云融合后獲取物料的單幀高動態(tài)三維數(shù)據(jù),提高數(shù)據(jù)融合精度,利于統(tǒng)計計算獲得高精度尺寸數(shù)據(jù)。
技術特征:
1.基于雙目線激光的在線高反光物料三維測量方法,其特征在于,基于帶有雙目線激光三維掃描系統(tǒng)的測量系統(tǒng),所述三維測量方法包括以下步驟:
2.根據(jù)權利要求1所述的基于雙目線激光的在線高反光物料三維測量方法,其特征在于:步驟五中的融合包括以下內(nèi)容:
3.根據(jù)權利要求2所述的基于雙目線激光的在線高反光物料三維測量方法,其特征在于:所述測量系統(tǒng)包括運動裝置和托盤,所述托盤上設置有若干物料定位孔,所述雙目線激光三維掃描系統(tǒng)設置于所述運動裝置上,所述運動裝置驅動所述雙目線激光三維掃描系統(tǒng)相對于所述托盤平移。
4.根據(jù)權利要求3所述的基于雙目線激光的在線高反光物料三維測量方法,其特征在于:所述雙目線激光三維掃描系統(tǒng)的標定包括相機標定和激光光平面標定;標定步驟包括:
5.根據(jù)權利要求4所述的基于雙目線激光的在線高反光物料三維測量方法,其特征在于:所述托盤更換后,步驟一中還包括托盤標定,建立激光光條在世界坐標系下的三維信息數(shù)據(jù)與托盤坐標的轉換關系。
6.根據(jù)權利要求5中所述的基于雙目線激光的在線高反光物料三維測量方法,其特征在于:伽馬增強處理中的γ1取0.7,伽馬減弱處理中的γ2取1.53。
7.根據(jù)權利要求6中所述的基于雙目線激光的在線高反光物料三維測量方法,其特征在于:所述測量系統(tǒng)還包括掃碼相機,所述托盤上設置有二維碼,用于標記所述托盤上各個所述物料定位孔的分布信息和物料信息,步驟六中還包括將單幀三維數(shù)據(jù)轉換成托盤坐標系下的結構三維數(shù)據(jù),根據(jù)所述物料定位孔的分布信息對結構三維數(shù)據(jù)進行數(shù)據(jù)分割,統(tǒng)計和計算物料的三維結構尺寸。
8.根據(jù)權利要求7所述的基于雙目線激光的在線高反光物料三維測量方法,其特征在于:還包括驗證步驟,其包含以下內(nèi)容:根據(jù)所述物料定位孔的分布信息和物料信息,判斷物料擺放順序是否正確;根據(jù)物料信息,判斷物料的測量結果是否滿足結構尺寸要求。
技術總結
本發(fā)明公開了基于雙目線激光的在線高反光物料三維測量方法,包括:建立世界坐標系,標定系統(tǒng);拍攝獲得左激光條圖像和右激光條圖像;對圖像進行伽馬增強、伽馬減弱和卷積處理;閥值分割,灰度重心提取滿足光條寬度閥值的光條中心點;融合8幅圖像光條中心的點云數(shù)據(jù);統(tǒng)計計算物料三維結構尺寸;該測量方法通過雙目線激光三維掃描系統(tǒng)拍攝單幀激光條圖像,經(jīng)圖像處理獲取高亮度、低亮度、線條增強圖片,有助于獲取更多的高反光區(qū)域和低反射區(qū)域的點云數(shù)據(jù),測量精度更高;結合閥值分割和寬度閥值約束進行光條中心提取,不提取高反光區(qū)域的中心,利于獲得精確度更高的光條中心數(shù)據(jù),融合8條光條中心的點云數(shù)據(jù),兼顧提取精度和點云數(shù)據(jù)完整度。
技術研發(fā)人員:衡思迎,常青,張忠選,羅振,王遠振
受保護的技術使用者:天津汽車模具股份有限公司
技術研發(fā)日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!