一種無人機單發(fā)失效控制方法、系統(tǒng)、設(shè)備以及介質(zhì)與流程
本發(fā)明涉及飛行控制,具體涉及一種無人機單發(fā)失效控制方法、系統(tǒng)、設(shè)備以及介質(zhì)。
背景技術(shù):
1、雙發(fā)無人機是一種配備有兩個發(fā)動機的無人駕駛飛行器,這種無人機具有較大的載重能力,在各種復(fù)雜地形和惡劣環(huán)境下都能快速、準確地將物資送達目的地,適用于各種物流運輸任務(wù),其較長的航程也能夠執(zhí)行遠距離任務(wù)。具有大載重能力、長航程、適應(yīng)性強等優(yōu)點。而雙發(fā)無人機可能會由于發(fā)動機自身故障、燃油系統(tǒng)故障、電氣系統(tǒng)故障、外部因素(如雷擊、鳥擊、惡劣天氣)以及人為操作等原因?qū)е聝H單側(cè)發(fā)動機出現(xiàn)故障。單發(fā)失效問題是雙發(fā)無人機存在的安全隱患,當雙發(fā)無人機出現(xiàn)單發(fā)失效問題時,兩個發(fā)動機產(chǎn)生的推力不再平衡,嚴重影響飛行穩(wěn)定性和安全性。
2、現(xiàn)有的無人機單發(fā)失效控制技術(shù)大多僅針對在空中發(fā)生單側(cè)發(fā)動機失效的情況,缺少對任務(wù)剖面的全流程分析。且在空中直接采用方向舵補償?shù)姆椒殚_環(huán)控制,無法完全抵消空中單發(fā)失效帶來的不對稱推力影響,從而影響飛機橫航向穩(wěn)定性,造成一定程度上的經(jīng)濟損失。
3、因此,需要提供一種無人機單發(fā)失效控制方法、系統(tǒng)、設(shè)備以及介質(zhì)以解決上述問題。
技術(shù)實現(xiàn)思路
1、本發(fā)明提供一種無人機單發(fā)失效控制方法、系統(tǒng)、設(shè)備以及介質(zhì),以解決現(xiàn)有的在空中直接采用方向舵補償?shù)姆椒殚_環(huán)控制,無法完全抵消空中單發(fā)失效帶來的不對稱推力影響,從而影響飛行安全的問題,保證飛機橫航向穩(wěn)定,順利完成回收。
2、本發(fā)明的一種無人機單發(fā)失效控制方法采用如下技術(shù)方案,包括:
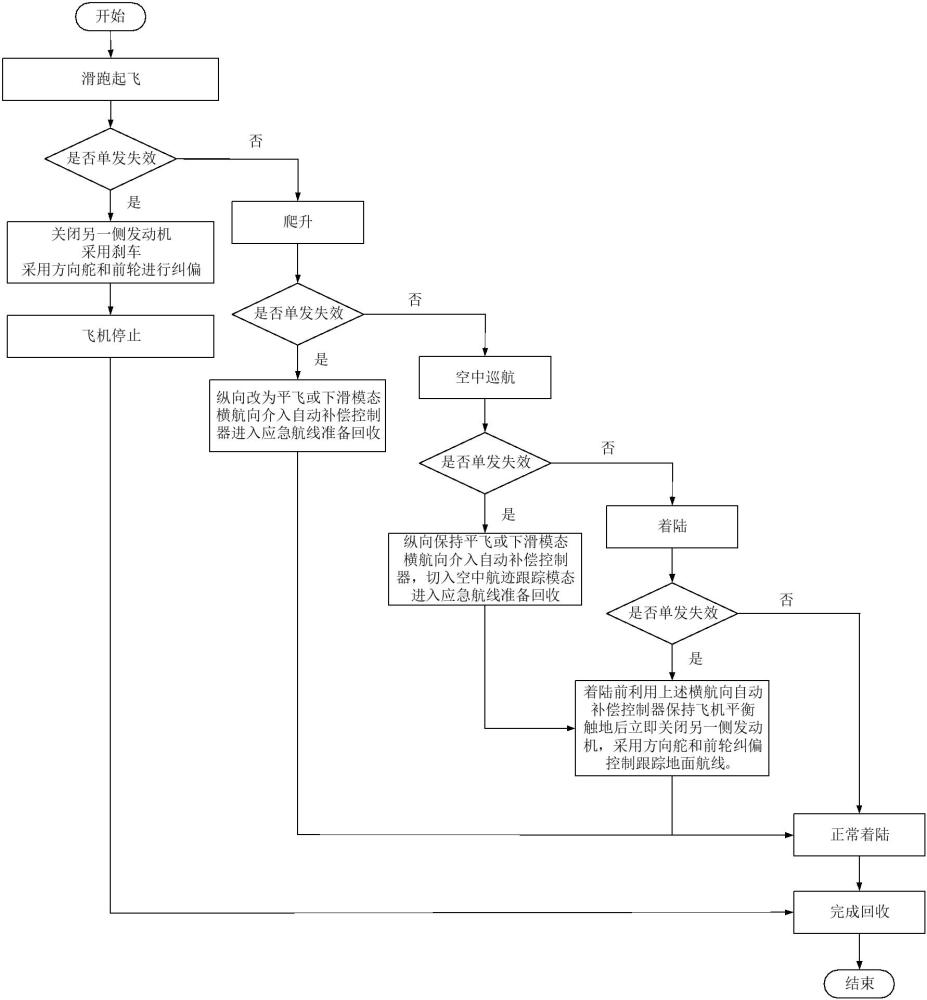
3、無人機起飛階段的單發(fā)失效控制、空中巡航階段的單發(fā)失效控制以及著陸階段的單發(fā)失效控制;
4、其中,無人機起飛階段的單發(fā)失效控制包括:中斷起飛,并關(guān)閉另一側(cè)發(fā)動機,使用剎車,采用方向舵和前輪對無人機進行糾偏控制;
5、無人機空中巡航階段的單發(fā)失效控制包括:通過橫航向自動補償控制器與飛行控制系統(tǒng)共同對單側(cè)發(fā)動機帶來的附加偏航力矩進行補償,使飛機達到平衡狀態(tài),并將無人機航向調(diào)整到設(shè)計的應(yīng)急航線,完成回收;
6、無人機著陸階段的單發(fā)失效控制包括:在著陸前利用橫航向自動補償控制器保持飛機平衡,觸地后立即另側(cè)關(guān)閉另一側(cè)發(fā)動機,并采用方向舵和前輪糾偏控制跟蹤地面航線。
7、優(yōu)選地,在滑跑起飛階段、著陸階段采用方向舵和前輪糾偏控制跟蹤地面航線時,均以地速方向航向角控制回路作為內(nèi)回路,以地面航跡跟蹤控制回路作為外回路,以實際的地速方向航向角反饋量作為被控量,以預(yù)定的地面航向解算出來的第一目標航向角作為目標量,獲取方向舵與前輪對應(yīng)的糾偏控制量。
8、優(yōu)選地,方向舵的糾偏控制量的表達式為:
9、
10、式中,為方向舵的糾偏控制量;為實際的地速方向航向角反饋量;為地速方向航向角速率;為方向舵地速方向航向角控制的比例系數(shù);為方向舵地速方向航向角控制的微分系數(shù);為方向舵地面航跡跟蹤控制的比例系數(shù);為方向舵地面航跡跟蹤控制的積分系數(shù);為第一目標航向角;為預(yù)定的地面航向;為地面?zhèn)认蚓嚯x目標值;為當前地面?zhèn)认蚓嚯x反饋值;為方向舵糾偏控制的慣性環(huán)節(jié)時間常數(shù);為復(fù)數(shù)變量。
11、優(yōu)選地,前輪的糾偏控制量的表達式為:
12、
13、其中,為前輪的糾偏控制量;為實際的地速方向航向角反饋量;為地速方向航向角速率;為第一目標航向角;為預(yù)定的地面航向;是地面?zhèn)认蚓嚯x目標值;是當前地面?zhèn)认蚓嚯x反饋值;為前輪地速方向航向角控制的比例系數(shù);為前輪地速方向航向角控制的微分系數(shù);為前輪地面航跡跟蹤控制的比例系數(shù);為前輪糾偏控制的慣性環(huán)節(jié)時間常數(shù)。
14、優(yōu)選地,在無人機空中巡航階段的單發(fā)失效控制中,橫航向自動補償控制器以偏航角控制回路作為內(nèi)回路,以航跡跟蹤控制作為外回路,以實際的偏航角反饋量作為被控量,以預(yù)定的飛機航向解算得到的第二目標航向角作為目標量,獲取方向舵的補償控制量,根據(jù)補償控制量補償單側(cè)發(fā)動機失效帶來的偏航力矩。
15、優(yōu)選地,方向舵的補償控制量的表達式為:
16、
17、式中,為方向舵的補償控制量;為實際的偏航角反饋量;為以預(yù)定的飛機航向解算出來的第二目標航向角; r為實際的偏航角速率;為自動補償控制律的比例系數(shù);為自動補償控制律的積分系數(shù);為自動補償控制律的微分系數(shù); t為自動補償控制的慣性環(huán)節(jié)時間常數(shù)。
18、優(yōu)選地,以預(yù)定航線解算得到的第二目標航向角的步驟為:
19、
20、式中,為以預(yù)定的飛機航向解算出來的第二目標航向角;為預(yù)定的飛機航向;為側(cè)向距離目標值; y為當前側(cè)向距離反饋值;為側(cè)向距離控制的比例系數(shù);為側(cè)向距離控制的積分系數(shù)。
21、一種無人機單發(fā)失效控制系統(tǒng)采用如下技術(shù)方案,包括:控制模塊,控制模塊用于無人機起飛階段的單發(fā)失效控制、空中巡航階段的單發(fā)失效控制以及著陸階段的單發(fā)失效控制;其中,無人機起飛階段的單發(fā)失效控制包括:中斷起飛,并關(guān)閉另一側(cè)發(fā)動機,使用剎車,采用方向舵和前輪對無人機進行糾偏控制;無人機空中巡航階段的單發(fā)失效控制包括:通過橫航向自動補償控制器與飛行控制系統(tǒng)共同對單側(cè)發(fā)動機帶來的附加偏航力矩進行補償,使飛機達到平衡狀態(tài),并將無人機航向調(diào)整到設(shè)計的應(yīng)急航線,完成回收;無人機著陸階段的單發(fā)失效控制包括:在著陸前利用橫航向自動補償控制器保持飛機平衡,觸地后立即關(guān)閉另一側(cè)發(fā)動機,并采用方向舵和前輪糾偏控制跟蹤地面航線。
22、一種電子設(shè)備采用如下技術(shù)方案,包括處理器、存儲器以及存儲在存儲器上的計算機程序,計算機程序被處理器執(zhí)行時實現(xiàn)本發(fā)明的所述的一種無人機單發(fā)失效控制方法的步驟。
23、一種存儲介質(zhì)采用如下技術(shù)方案,其上存儲有計算機程序,該計算機程序被運行時,用于執(zhí)行本發(fā)明的所述的一種無人機單發(fā)失效控制方法的步驟。
24、本發(fā)明的有益效果是:
25、通過在起飛階段,通過中斷起飛,并關(guān)閉另一側(cè)發(fā)動機,使用剎車,采用方向舵和前輪對無人機進行糾偏控制防止飛機發(fā)生側(cè)翻或從側(cè)向沖出跑道,避免無人機機體損傷,延長無人機的使用壽命;在空中巡航階段,通過橫航向自動補償控制器與飛行控制系統(tǒng)共同對單側(cè)發(fā)動機帶來的附加偏航力矩進行補償,使飛機達到平衡狀態(tài),并將無人機航向調(diào)整到設(shè)計的應(yīng)急航線,完成回收,從而防止由于推力不對稱導(dǎo)致飛機姿態(tài)出現(xiàn)大的偏航和滾轉(zhuǎn),提高無人機在空中的安全性;在空中,防止由于推力不對稱引起的側(cè)滑角不斷增大,升阻特性惡化,導(dǎo)致飛機失速,避免發(fā)生更加嚴重的飛行事故。在著陸階段,在著陸前利用橫航向自動補償控制器保持飛機平衡,觸地后立即關(guān)閉另一側(cè)發(fā)動機,并采用方向舵和前輪糾偏控制跟蹤地面航線,防止由于橫航向平衡遭到破壞導(dǎo)致的著陸失敗問題,一定程度上避免飛機損失。對于執(zhí)行特定任務(wù)的無人機,有助于確保無人機在出現(xiàn)單發(fā)失效情況時仍能完成任務(wù),提高無人機任務(wù)完成率,綜上,本發(fā)明保障無人機執(zhí)行任務(wù)全過程中的飛行安全,提高無人機單發(fā)失效應(yīng)急處理能力。
- 還沒有人留言評論。精彩留言會獲得點贊!