基于可視化牽張設備的智能放線裝備的制作方法
本發明屬于輸電線路施工,具體涉及基于可視化牽張設備的智能放線裝備。
背景技術:
1、傳統輸電線路施工過程中,且張力放線過程中,一般采用全過程張力使導線保持一定張力而脫離地面,張力放線一般為8千米左右,張力放線過程中使用的施工機具多、需要監控的風險點也較多,重要關鍵部位都需要人員在現場,投入的人員和施工強度較大,且現場協同性不強,不具備全局管控的條件;目前輸電線路施工均采用傳統抱桿組立及張力放線的方式,傳統施工過程中,存在著較大安全隱患,同時消耗較大人力和物力,亟待解決和改進;因此,提供一種結構合理、實現全局管控、易于安裝懸掛、降低風險的基于可視化牽張設備的智能放線裝備是非常有必要的。
技術實現思路
1、本發明的目的是為了克服現有技術的不足,而提供一種結構合理、實現全局管控、易于安裝懸掛、降低風險的基于可視化牽張設備的智能放線裝備。
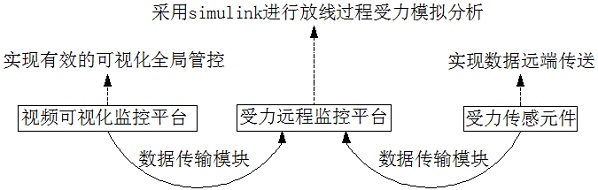
2、本發明的目的是這樣實現的:基于可視化牽張設備的智能放線裝備,它包括視頻可視化監控平臺、受力遠程監控平臺和受力傳感元件,所述的視頻可視化監控平臺和受力傳感元件分別通過數據傳輸模塊與受力遠程監控平臺建立無線通訊連接,所述的受力傳感元件包括受力傳感模組和可視化模組;所述的視頻可視化監控平臺內置有可視化及受力分析模型模塊,所述的視頻可視化監控平臺與受力傳感模組、可視化模組配合實現遠程觀看放線過程中各處現場情況及桿塔、工器具、材料受力情況,實現有效的可視化全局管控;所述的受力傳感元件安裝在桿塔、滑車或其他放線關鍵部位,用于采集現場受力數據,能夠精準測量各種不同施工作業點和作業工器具的受力情況,能使用與吊裝、支撐、懸掛各類連接方式;所述的受力遠程監控平臺采用simulink進行放線過程受力模擬分析,結合現場采集的受力數據超,過限制值時實時告警。
3、所述的受力遠程監控平臺由兩部分組成:上層的監控中心系統和下層的各個可視化牽張設備單片機子系統;所述的監控中心完成人機交互工作,為用戶提供一個可視化的監控界面,可隨時監聽各單個可視化牽張設備的工作狀態,分析、診斷各單機的運行狀態,并向現場可視化牽張設備操作者發出指令,對設備的工作狀態進行及時調整控制;所述的下層滿足現場操作者要求,實時監聽各個可視化牽張設備工作中的運行狀態,發生異常情況時向操作者發出警報信號,接收監控中心發出的調節指令或建議;所述的上層和下層之間的通訊連接采用gprs接入internet來實現。
4、所述的受力遠程監控平臺采用單片機安裝在可視化牽張設備的每個牽引機、張力機上,對牽引機、張力機的工作信號進行實時采集,采集到的數據通過gprs無線網卡以無線形式發射到基站bs,gprs將分從基站發送到服務支持節點sgsn,sgsn與網關支持節點ggsn進行通訊,ggsn對接收到的分組數據進行相應處理,再發送到目的地網絡internet;來自internet的標識有移動臺地址的ip包由ggsn接收,接著再轉發到sgsn,再傳送到移動臺上,從而實現了gprs與internet兩者的相互通訊;擁有固定ip地址的監控中心直接與internet連接,從而實現了牽引機、張力機單機系統與監控中心之間的通訊。
5、所述的受力傳感元件的可視化模組安裝在受力傳感模組上方,所述的受力傳感模組包括氣缸,所述的氣缸左側內部設置有滑板,所述的氣缸左側上下兩側均設置有移動板,所述的移動板均為“l”形結構且呈上下對稱設置,所述的移動板右側端部均通過滑座與滑板滑動連接,所述的移動板通過固定螺栓與滑座連接;所述的移動板上方設置有無線數據收發器,所述的移動板左側端部內部均設置有吸附吸嘴,所述的吸附吸嘴均通過吸嘴安裝軸與移動板連接,所述的移動板內側均設置有懸掛夾爪,所述的懸掛夾爪均通過旋轉盤與移動板活動連接。
6、所述的氣缸右側設置有安裝板,所述的安裝板右側設置有受力傳感器元件,所述的氣缸上方設置有“t”形結構的安裝柱,所述的可視化模組通過安裝柱與受力傳感模組連接。
7、所述的可視化模組包括穩定板,所述的穩定板外側設置有連接板,所述的連接板外側設置有與安裝柱連接的開口夾環,所述的開口夾環一側內部設置有鎖緊螺孔;所述的連接板上方設置有固定板,所述的固定板內側設置有可視化模塊裝置。
8、所述的視頻可視化監控平臺采用基于空間信息模型構建輸電線路三維可視化平臺,具體包括以下步驟:
9、步驟1:構建輸電線路三維可視化框架體系結構;
10、步驟2:基于遺傳算法的坐標轉換方法;
11、步驟3:算例分析。
12、所述的步驟1中的構建輸電線路三維可視化框架體系結構具體為:平臺結構的數據層建立三維模型庫和地理信息庫兩個獨立數據庫,通過統一的信息數據模型,實現空間信息數據模型與三維模型的數據的共享與交互,能夠完成不同系統間的通信。
13、所述的步驟2中的基于遺傳算法的坐標轉換方法具體為:桿塔實際gps空間坐標在三維引擎定義的統一世界坐標系中進行渲染首先轉換到平面坐標中,然而,目前的坐標轉化算法會導致轉換過程中的病態問題,引起轉換誤差偏大的缺陷,因此,采用基于遺傳算法的坐標轉換方法,具體包括以下步驟:
14、步驟2.1:病態問題分析:采用布爾莎模型進行坐標轉換,其表達式為:在使用布爾莎模型坐標轉換過程中δx、δy、δz、εx、εy、εz、k七個參數值的選擇決定了轉換精度,理論上講,運用坐標基準轉換和坐標系轉換,在數據量足夠多且精確的條件下,就可以實現任意兩個坐標基準之間不同坐標形式的轉換,但由于模型參數選擇、觀測誤差、計算數值處理問題導致數據微小的變化會引起解的巨大變化,導致轉換后數值很不穩定,使得一部分桿塔很難在地形中實現準確定位;將gps坐標轉換成地方坐標時誤差不可避免,首先設備接收到的gps坐標不是真實的坐標,而是按照加密算法進行加偏以后的坐標,并且地圖坐標加偏值是非線性的,不同地區的偏移值也有所不同;其次用來求解七參數的參考點很難分布轉換范圍的不同區域,如果參考點分布范圍太小,其旋轉參數與平移參數之間的相關性非常大,必然導致公式(1)具有比較大的條件數,使得最小二乘法求得的轉換參數誤差明顯偏大,且不穩定,難于滿足系統定位精度的要求;
15、步驟2.2:遺傳算法:遺傳算法ga是學習自然選擇和遺傳學機理的生物進化過程通過模擬自然進化過程搜索最優解的方法,選擇交叉和變異構成了遺傳操作,遺傳算法包括染色體編碼、設定初始群體、設計適應度函數、交叉變異操作以及設定控制參數五個基本要素,利用遺傳算法求解問題時需要將解非線性方程組求七個參數的問題轉化為求最優解問題的形式,首先建立如下目標函數:min?f(x)=min||v2-δv+(1+k)v1+rv1||(2),其中,
16、所述的步驟2.2中的遺傳算法具體包括以下步驟:
17、步驟2.21:染色體編碼:確定解空間的范圍為[m,n],按照下式進行二進制編碼:式中,gk為二進制數字串的第k位值;m、n的取值由具體坐標位置、采樣數據的特點決定;
18、步驟2.22:初始群體設定:初始群體的分布應盡量布滿整個解空間,避免算法陷入局部最優;
19、步驟2.23:適應度評價:采用將目標函數直接映射成為適應度函數,定義適應度函數為f(v)=1/f(v),個體適應度值越大,表示個體越優秀,從而有更多的機會繁殖后代;
20、步驟2.24:個體選擇:在進化選擇過程中,希望早期選擇的約束力小一些,以便一些是適應度較差的個體有機會參與遺傳迭代;相反在后期時段,則增大選擇約束力,加快算法的收斂速度,個體的選擇概率公式為:
21、
22、步驟2.25:交叉算子:采用了二點交叉法,以交叉概率pc選取某對雙親二進制數字串交叉,把兩個附帶個體的部分結構加以替換充足,而生成新個體的操作;
23、步驟2.26:變異算子:假設子代個體為s=a1a2...am,并設定合適的個體的變異概率pm,按照下式進行變異操作:
24、步驟2.27:按流程進化迭代,最終得到優化問題的最優解。
25、本發明的有益效果:本發明為基于可視化牽張設備的智能放線裝備,在使用中,本發明的視頻可視化監控平臺通過內置的可視化及受力分析模型模塊遠程觀看桿塔受力情況,實現有效的可視化全局管控,減少各處人員使用數量,大幅度節約人工費用,從而有效節省施工經費;本發明的受力遠程監控平臺采用simulink進行放線過程受力模擬分析,結合現場采集受力數據,通過平臺端或手機端可以實時觀看桿塔組立及放線過程中各處現場情況及工器具、材料受力情況,超過限制值時實施告警至工作負責人及稽查人員,工作負責人和稽查人員及時對現場違章情況進行制止,避免安全事故發生;本發明的受力傳感元件能夠精準測量各種不同施工作業點和作業工器具的受力情況并易于懸掛,能使用與吊裝、支撐、懸掛等各類連接方式,有效實現各部件受力精準測量及遠端傳送;本發明在可視化牽張機基礎上,加入桿塔、滑車等放線關鍵部位受力感知元件,遠程收集各處放線關鍵部位受力情況,收集數據,開展全過程張力放線模擬分析,實現放線全過程、全通道可視;本發明能夠減少傳統張力放線施工中人員投入,降低傳統張力放線施工中的風險,實現放線施工全過程管控;本發明具有結構合理、實現全局管控、易于安裝懸掛、降低風險的優點。
- 還沒有人留言評論。精彩留言會獲得點贊!