一種永磁同步電機(jī)雙霍爾電流傳感器采樣的電流重構(gòu)方法
本發(fā)明涉及一種電流重構(gòu)方法,屬于共直流母線型開繞組永磁同步電機(jī)控制。
背景技術(shù):
1、共直流母線型開繞組永磁同步電機(jī)相比于比普通永磁同步電機(jī)具有高功率密度高效率、硬件成本低、可靠性強(qiáng)耐用性高等優(yōu)點(diǎn),在電動汽車,航空航天、艦船推進(jìn)等領(lǐng)域得到廣泛研究。在高性能交流電機(jī)驅(qū)動系統(tǒng)中,常常需要對電壓源型pwm逆變器進(jìn)行閉環(huán)控制,以獲得高精度的三相正弦波電流,進(jìn)而保證快速準(zhǔn)確的的電磁轉(zhuǎn)矩控制。
2、典型電壓源型pwm逆變器至少設(shè)置兩個霍爾電流傳感器,以提供相電流反饋信號。但是由于共直流母線開繞組永磁同步電機(jī)存在零序電路,傳統(tǒng)方法需要采用三個霍爾電流傳感器進(jìn)行電流采樣,使控制系統(tǒng)的成本和容量增加,并且導(dǎo)致外圍電路更加復(fù)雜。同時,受傳感器精度影響零序電流采樣結(jié)果可能存在偏置和比例誤差,降低零序電流抑制能力。因為共直流母線型開繞組永磁同步電機(jī)對于控制精度有更高的要求,所以對電流信息要求更高。對傳統(tǒng)永磁同步電機(jī)的電流重構(gòu)方法以獲得電流信息不適用于含有零序電流的共直流母線型開繞組永磁同步電機(jī)。
3、為了降低系統(tǒng)硬件成本以及系統(tǒng)復(fù)雜程度,本方法設(shè)計一種基于兩個霍爾電流傳感器的共直流母線開繞組永磁同步電機(jī)驅(qū)動器的相電流重構(gòu)技術(shù),避免了復(fù)雜的調(diào)制算法的同時,又能更好的適用于低成本的應(yīng)用場合。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明為解決傳統(tǒng)方法需要采用三個霍爾電流傳感器進(jìn)行電流采樣,使控制系統(tǒng)的成本和容量增加,并且導(dǎo)致外圍電路更加復(fù)雜的問題,進(jìn)而提出一種永磁同步電機(jī)雙霍爾電流傳感器采樣的電流重構(gòu)方法。
2、本發(fā)明為解決上述問題采取的技術(shù)方案是:本發(fā)明的步驟包括:
3、步驟1、安裝霍爾電流傳感器h1和霍爾電流傳感器h2;
4、步驟2、設(shè)置霍爾電流傳感器h1和霍爾電流傳感器h2的采樣時刻;
5、步驟3、設(shè)置霍爾電流傳感器h1和霍爾電流傳感器h2的最小采樣時間;
6、步驟4、根據(jù)霍爾電流傳感器h1和霍爾電流傳感器h2在采樣獲得的電流值is1、is2、i0進(jìn)行電流重構(gòu),并獲得a、b、c三相的各相電流值。
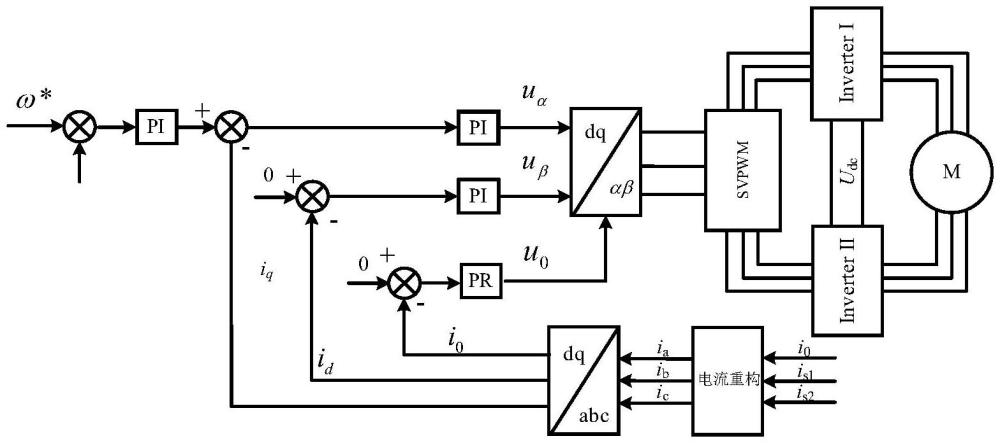
7、進(jìn)一步的,步驟1中霍爾電流傳感器的安裝方式為:共直流母線開繞組永磁同步電機(jī)為雙逆變器結(jié)構(gòu),左右兩個逆變器分別為逆變器1和逆變器2;霍爾電流傳感器h1采樣逆變器1上橋臂s11和s13之間正母線電流和逆變器1下橋臂s14和s16之間負(fù)母線電流,霍爾電流傳感器h2設(shè)置在電機(jī)三相繞組采樣處,采樣三相電流之和,即直接獲得零序電流中三倍的零序電流。
8、進(jìn)一步的,零序電流的表達(dá)式為:
9、
10、公式(1)中,i0表示零序電路中的零序電流值,ia、ib、ic分別表示表示電機(jī)繞組中a、b、c三相的相電流值。
11、進(jìn)一步的,步驟2中采樣時刻與pwm的關(guān)系為:將霍爾電流傳感器h1和霍爾電流傳感器h2的采樣時刻分別設(shè)置在pwm載波的波峰和波谷處;定義ts1和ts2為霍爾電流傳感器h1的采樣時刻,定位t0為霍爾電流傳感器h2的采樣時刻;其中ts1、ts2分別為pwm載波波峰和載波波谷的時刻,t0為pwm的載波波峰時刻,載波波峰和載波波谷分別處于兩個逆變器1和逆變器2產(chǎn)生的空間電壓矢量v77、v00組合作用時間內(nèi)。
12、進(jìn)一步的,步驟3中最小采樣時間大于電流振鈴時間、a/d數(shù)模轉(zhuǎn)換時間、死區(qū)時間和延時時間之和,最小采樣時間的表達(dá)式為:
13、tmin>tdead+tdelay+tset+tadc(2),
14、公式(2)中tmin表示最小采樣時間,tdead表示死區(qū)時間,tdelay表示延時時間,tset表示電流振鈴時間,tadc表示a/d數(shù)模轉(zhuǎn)換時間;
15、設(shè)置空間的電壓矢量組合最小作用時間大于等于最小采樣時間,即:
16、min(tvij)≥tmin(3),
17、公式(3)中,tvij為空間電壓矢量組合最小作用時間。vij分別為逆變器1、逆變器2產(chǎn)生空間電壓矢量組合,(i,j=1、2......8)。
18、進(jìn)一步的,步驟4中在單個pwm中載波波峰時刻,兩個霍爾電流傳感器h1、h2同時進(jìn)行采樣,載波波峰時刻對應(yīng)零空間電壓矢量組合v77作用,正母線電流通過逆變器1上橋臂s11、s13、s15流入電機(jī)三相繞組,通過逆變器2上橋臂s21、s23、s25流出電機(jī)三相繞組,返回直流母線端;霍爾電流傳感器h1采樣開關(guān)器件s11、s13之間的電流值;根據(jù)基爾霍夫電流定律,s11、s13處正母線電流被開關(guān)器件s13、s15分流之后注輸入電機(jī)b、c兩相繞組,則s11、s13電流值為b、c兩相電流之和,采樣電流值為is1;則有:
19、is1=ib+ic
20、ib和ic分別為電機(jī)三相繞組中b相、c相的相電流值;
21、零空間電壓矢量組合v77作用時,逆變器1、逆變器2上橋臂開關(guān)器件s11、s13、s15、s21、s23、s25全部導(dǎo)通,正母線電流經(jīng)過逆變器1的三個上橋臂分流輸入電機(jī)繞組a、b、c三相;霍爾電流傳感器h2采樣中兩個逆變器1、2之間a1、a2,b1、b2、c1、c2六個電位中間的電流,即采樣開繞組永磁同步電機(jī)三相繞組電流,采樣電流值為三相電流之和;共直流母線開繞組永磁同步電機(jī)存在零序電路,零序電流通過三相繞組被霍爾電流傳感器h2采樣;零序電流值為三相電流之和的三分之一;霍爾電流傳感器h2采樣電流值為i0;則有:
22、io=(ia+ib+ic)
23、i0為零序電流值,ia、ib、ic分別為a、b、c三相各相電流值;
24、根據(jù)載波與pwm波的調(diào)制關(guān)系,載波波谷時刻,零空間電壓矢量組合v00作用,母線電流通過逆變器1下橋臂s12、s14、s16流入電機(jī)三相繞組,通過逆變器2下橋臂s22、s24、s26流出電機(jī)三相繞組,返回直流母線端;霍爾電流傳感器h1采樣開關(guān)器件s14、s16之間的電流值;根據(jù)基爾霍夫電流定律,母線電流分流后通過s16輸入電機(jī)c相繞組,則s14、s16之間的電流值為c相電流值,采樣電流值為is2;則有:
25、is2=ic
26、ic為c相相電流值;
27、通過霍爾電流傳感器h1、h2在不同時刻的采樣電流值進(jìn)行重構(gòu),獲得電機(jī)繞組三相電流信息;重構(gòu)表達(dá)式為:
28、
29、is1為b、c相電流之和,is2采樣獲得的電流值為c相電流,is1減去is2為b相電流值;i0為采樣獲得的三相電流值的和,i0減去is1為a相電流值。
30、本發(fā)明的有益效果是:本發(fā)明利用霍爾電流傳感器h2直接采樣三相電流之和,避免了零序電流產(chǎn)生的采樣誤差累積,進(jìn)一步減少了因零序電流產(chǎn)生的速度、轉(zhuǎn)矩紋波。并且本發(fā)明采用兩個霍爾電流傳感器采樣逆變器橋臂間母線電流以及三相電流之和的方法相較于傳統(tǒng)采用三個霍爾電流傳感器直接采樣電機(jī)各相電流的方法具有外圍電路復(fù)雜程度低、硬件成本低的優(yōu)點(diǎn)。通過設(shè)置兩個霍爾電流傳感器的采樣時刻,避免了復(fù)雜的調(diào)制算法、相移操作,減少了系統(tǒng)控制成本。本發(fā)明設(shè)置霍爾電流傳感器的采樣時刻,將兩個霍爾電流傳感器h1、h2的采樣時刻設(shè)置在單個pwm中的載波波峰和載波波谷時刻。避免了復(fù)雜的盲區(qū)補(bǔ)償策略,不具有傳統(tǒng)方法中的周期性盲區(qū)。
- 還沒有人留言評論。精彩留言會獲得點(diǎn)贊!