一種三角升降控制結構的制作方法
本技術涉及手套機領域,特指一種三角升降控制結構。
背景技術:
1、現在市面上常規手套機結構基本只有兩種,第一種:只具備正向起針功能,其反向起針僅用于封口。在正向起針過程中,織針針腳的運行軌跡是:先沿橡筋起針三角的軌道面上升和下降,接著沿正向起針三角的軌道面上升至最高點,之后沿軌道下降至正向密度三角的底部,以完成一個單向先織入橡筋后織入紗線的編織。
2、第二種:同時具備正向起針和反向起針功能,這種針織手套機業內稱為提花手套機或電腦橫機。如若在同一針織橫列中,在正向起針后還要進行反向起針,則織針針腳的運行軌跡是:在通過橡筋密度三角的底部后還要通過反向密度三角的底部進行運動。該方式可以實現反向起針,但是對橡筋線的吃入造成嚴重干擾,加大了正反向密度三角控制的難度。
3、在先申請“cn116623353a”(對比文件1),設計了一種可在單面編織、集圈編織和雙向同步編織的切換的三角裝置,但是由于其只在一側設置了橡筋三角(其圖1、4中為右側),因此在進行橡筋編織時,編織效率較低,且其橡筋走針通道借用了右側的密度三角,因此需采用右密度三角與橡筋三角聯動的控制,其控制結構較為復雜。
4、申請人本身的在先申請“2024208475421”中,設計了一種雙向異步編織的三角裝置,雖然簡化了一部分的傳動結構,但是其仍舊采用了一體式多作用臂結構(也即對比文件1中的左密度推腳53、右密度推腳54、第一弧形延伸部21、第二弧形延伸部22)來進行各自三角的控制。但是該部件為不規則結構,需要做到對多個功能三角進行控制,因此其在加工難度上較大,且一旦磨損需要整個更換。
5、因此,本發明人對此做進一步研究,研發出一種三角升降控制結構,本案由此產生。
技術實現思路
1、本實用新型的目的在于提供一種三角升降控制結構,降低三角控制結構的加工難度,便于維護更換。
2、為了實現上述目的,本實用新型的技術方案如下:
3、一種三角升降控制結構,包括
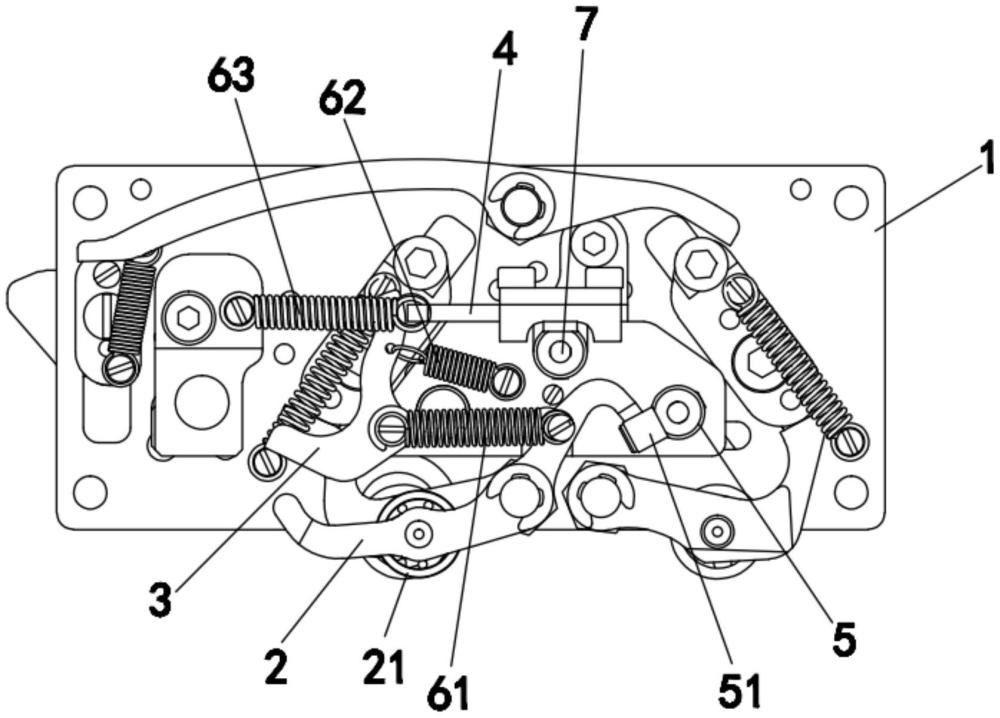
4、作用臂,作用臂通過軸承受導桿驅動而擺動,作用臂的一端與轉接臂聯動,另一端與起針三角聯動,同時,作用臂通過第一拉簧復位;
5、轉接臂位于作用臂上方,轉接臂的上端與升降滑塊聯動,升降滑塊用于控制中三角,轉接臂上設置有第二拉簧使轉接臂和升降滑塊緊貼;
6、升降滑塊與第三拉簧連接用于復位。
7、上述結構設置于三角底板之上,位于各種功能三角的背面;
8、作用臂受導桿驅動為現有技術,導桿通過對軸承施壓使作用臂沿其樞接軸擺動,從而使另一面的起針三角抬升;起針三角對應對比文件1的起針三角,中三角對應對比文件1的中間三角,作用臂與起針三角的聯動方式與對比文件1一致。
9、進一步,第一拉簧的一端設置在轉接臂的樞接軸上,另一端設置在作用臂的樞接軸上方。
10、進一步,升降滑塊中設置有滑槽,滑槽中設置有軸銷,軸銷與中三角聯動。
11、通過轉接臂推動升降滑塊,使軸銷在滑槽中移動時,相對三角底板的位置發生改變,從而使中三角相對三角底板產生移動。
12、進一步,第二拉簧與升降滑塊位于轉接臂的同一側。
13、由于升降滑塊通過轉接臂推動,因此通過第二拉簧的設置可以保證其與轉接臂緊貼。
14、進一步,第三拉簧與升降滑塊位于轉接臂的兩側。
15、由于第三拉簧起對升降滑塊的復位作用,因此其施加的拉力需要與轉接臂的推力相反。
16、進一步,升降滑塊與作用臂接觸的部位開設有限位槽。
17、限位槽用于限制作用臂使其不容易在垂直三角底板的方向上滑動。
18、采用上述方案后,本實用新型與現有技術相比,具有以下優點:
19、通過將原有的多作用臂分別用作用臂、轉接臂、升降滑塊等替代,在保證原有功能的同時,使各部件的結構得到簡化,且各部件可單獨拆卸安裝,降低了維護成本。
技術特征:
1.一種三角升降控制結構,其特征在于:包括
2.根據權利要求1所述的一種三角升降控制結構,其特征在于:第一拉簧的一端設置在轉接臂的樞接軸上,另一端設置在作用臂的樞接軸上方。
3.根據權利要求1所述的一種三角升降控制結構,其特征在于:升降滑塊中設置有滑槽,滑槽中設置有軸銷,軸銷與中三角聯動。
4.根據權利要求1所述的一種三角升降控制結構,其特征在于:第二拉簧與升降滑塊位于轉接臂的同一側。
5.根據權利要求1所述的一種三角升降控制結構,其特征在于:第三拉簧與升降滑塊位于轉接臂的兩側。
6.根據權利要求1所述的一種三角升降控制結構,其特征在于:升降滑塊與作用臂接觸的部位開設有限位槽。
技術總結
本技術涉及手套機領域,特指一種三角升降控制結構,包括作用臂,作用臂通過軸承受導桿驅動而擺動,作用臂的一端與轉接臂聯動,另一端與起針三角聯動,同時,作用臂通過第一拉簧復位;轉接臂位于作用臂上方,轉接臂的上端與升降滑塊聯動,升降滑塊用于控制中三角,轉接臂上設置有第二拉簧使轉接臂和升降滑塊緊貼;升降滑塊與第三拉簧連接用于復位。采用上述方案后,降低了三角控制結構的加工難度,便于維護更換。
技術研發人員:婁月鋒,單向海,胡偉江,繆利明
受保護的技術使用者:浙江高騰機電制造股份有限公司紹興分公司
技術研發日:20240718
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!