動臂解耦液壓系統(tǒng)的控制方法、裝置、挖機及存儲介質與流程
本發(fā)明涉及挖機,尤其涉及一種動臂解耦液壓系統(tǒng)的控制方法、裝置、挖機及存儲介質。
背景技術:
1、在液壓挖掘機作業(yè)過程中,動臂進行著周期性的提臂與下臂動作,動臂勢能大多以熱能的形式消耗在多路閥口上,不僅能量浪費嚴重造成油耗高,還易引起液壓系統(tǒng)的振動噪聲和發(fā)熱,降低系統(tǒng)的可靠性和壽命。
2、對此,如申請?zhí)枮閏n202110914796.1的前期專利中提供一種挖掘機勢能回收控制方法,在檢測到挖掘機的動臂處于下降工作狀態(tài)時確定挖掘機能量消耗函數(shù),通過最小加權偏差法計算耗能最低場景對應的最優(yōu)工作點,進而按照上述最優(yōu)工作點對挖掘機動臂的勢能進行回收,以實現(xiàn)挖掘機勢能的高效回收,保證勢能回收系統(tǒng)回收率的最大化,該控制方法過于復雜,且僅適用于開式液壓系統(tǒng),不適于在閉式液壓系統(tǒng)中進行應用。
技術實現(xiàn)思路
1、本發(fā)明的目的在于:提供一種動臂解耦液壓系統(tǒng)的控制方法、裝置、挖機及存儲介質,以簡化能量回收的控制方法,且能夠應用于閉式液壓系統(tǒng)中。
2、第一方面,本發(fā)明提供一種動臂解耦液壓系統(tǒng)的控制方法,動臂解耦液壓系統(tǒng)包括電池、與所述電池電連接的電機,與所述電機同時傳動連接的第一油泵和第二油泵,以及動臂油缸,所述動臂油缸具有無桿腔和有桿腔,所述第一油泵的兩端分別通過管路連接所述有桿腔和所述無桿腔,所述第二油泵的兩端分別通過管路連接補油油路和所述無桿腔,所述第一油泵和所述第二油泵均能夠正轉和反轉,該動臂解耦液壓系統(tǒng)的控制方法包括:
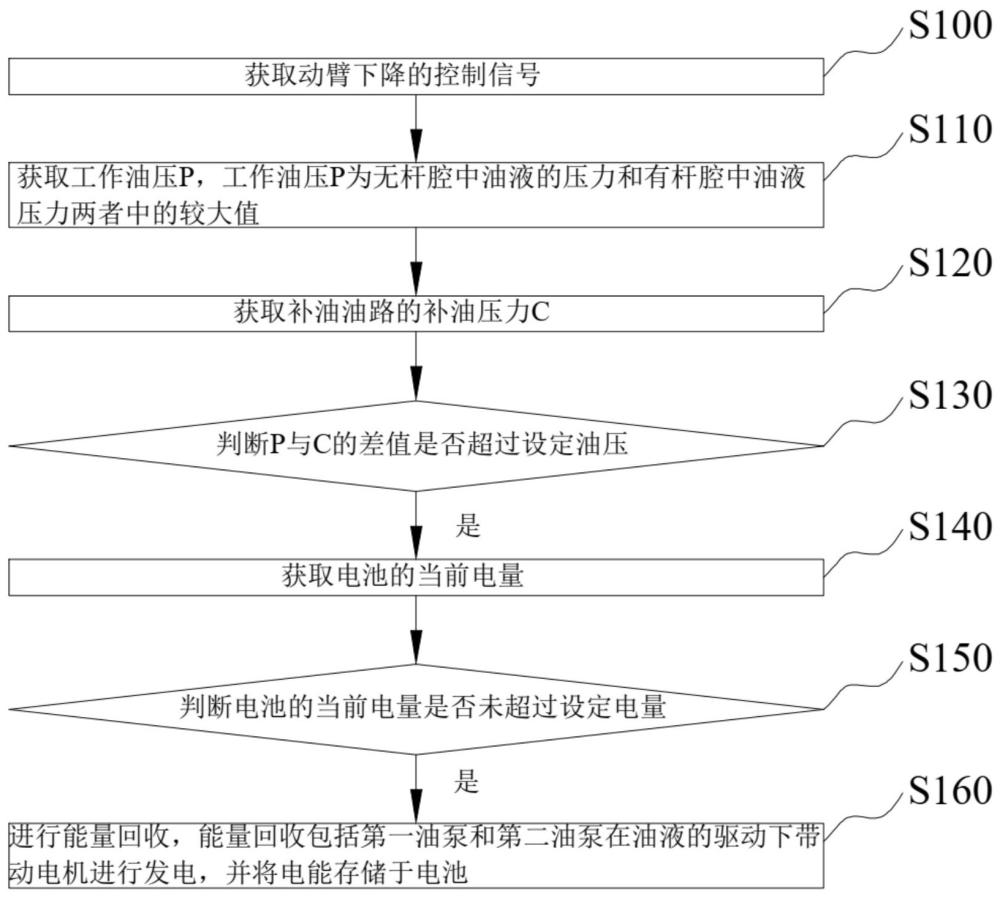
3、s100:獲取動臂下降的控制信號;
4、s110:獲取工作油壓p,所述工作油壓p為所述無桿腔中油液的壓力和所述有桿腔中油液壓力兩者中的較大值;
5、s120:獲取補油油路的補油壓力c;
6、s130:判斷p與c的差值是否超過設定油壓;
7、若是,則執(zhí)行s140;
8、s140:獲取電池的當前電量;
9、s150:判斷電池的當前電量是否未超過設定電量;
10、若是,則執(zhí)行s160;
11、s160:進行能量回收,能量回收包括所述第一油泵和所述第二油泵在油液的驅動下帶動所述電機進行發(fā)電,并將電能存儲于電池。
12、作為動臂解耦液壓系統(tǒng)的控制方法的優(yōu)選技術方案,進行能量回收之后,所述動臂解耦液壓系統(tǒng)的控制方法還包括:
13、s170:獲取操縱手柄的位置;
14、s180:基于所述操縱手柄的位置確定電機的需求轉速;
15、s190:獲取電機的當前轉速;
16、s200:基于所述電機的當前轉速與所述電機的需求轉速的差值確定附加扭矩,所述電機輸出所述附加扭矩。
17、作為動臂解耦液壓系統(tǒng)的控制方法的優(yōu)選技術方案,所述動臂解耦液壓系統(tǒng)還包括平衡閥,平衡閥用于連通所述有桿腔和所述無桿腔兩者中油壓較小的一者與所述補油油路;
18、在步驟s200中,當所述電機輸出所述附加扭矩之后,所述動臂解耦液壓系統(tǒng)的控制方法還包括;
19、s210:使所述有桿腔和所述無桿腔兩者中油壓較小的一者與所述補油油路進行油液置換。
20、作為動臂解耦液壓系統(tǒng)的控制方法的優(yōu)選技術方案,所述動臂解耦液壓系統(tǒng)的控制方法還包括:
21、s220:獲取動臂提升的控制信號;
22、s230:獲取所述工作油壓p;
23、s240:基于所述工作油壓p確定油泵的驅動扭矩t;
24、s250:獲取電機的額定扭矩a;
25、s260:比較t與a/2的大小;
26、若t大于a/2,則執(zhí)行s270;若t不大于a/2,則執(zhí)行s280;
27、s270:僅所述第一油泵輸出;
28、s280:所述第一油泵和所述第二油泵同時輸出。
29、作為動臂解耦液壓系統(tǒng)的控制方法的優(yōu)選技術方案,判讀p與c的差值是否超過設定油壓時,若否,則執(zhí)行s240;
30、判斷電池的當前電量是否未超過設定電量時,若超過;則執(zhí)行s240。
31、作為動臂解耦液壓系統(tǒng)的控制方法的優(yōu)選技術方案,當僅所述第一油泵輸出之后,以及當所述第一油泵和所述第二油泵同時輸出之后,所述動臂解耦液壓系統(tǒng)的控制方法還包括:
32、s290:獲取操縱手柄的位置;
33、s300:基于所述操縱手柄的位置確定電機的需求轉速;
34、s310:所述電機以所述需求轉速運行。
35、作為動臂解耦液壓系統(tǒng)的控制方法的優(yōu)選技術方案,當所述電機以所述需求轉速運行之后,所述動臂解耦液壓系統(tǒng)的控制方法還包括;
36、s320:使所述有桿腔和所述無桿腔兩者中油壓較小的一者與所述補油油路進行油液置換。
37、第二方面,本發(fā)明提供一種動臂解耦液壓系統(tǒng)的控制裝置,所述動臂解耦液壓系統(tǒng)電池、與所述電池電連接的電機,與所述電機同時傳動連接的第一油泵和第二油泵,以及動臂油缸,所述動臂油缸具有無桿腔和有桿腔,所述第一油泵的兩端分別通過管路連接所述有桿腔和所述無桿腔,所述第二油泵的兩端分別通過管路連接補油油路和所述無桿腔,所述第一油泵和所述第二油泵均能夠正轉和反轉,該動臂解耦液壓系統(tǒng)的控制裝置包括:
38、動臂下降信號獲取模塊,用于獲取動臂下降的控制信號;
39、工作油壓獲取模塊,用于獲取工作油壓p,所述工作油壓p為所述無桿腔中油液的壓力和所述有桿腔中油液壓力兩者中的較大值;
40、補油壓力獲取模塊,用于獲取補油油路的補油壓力c;
41、第一判斷模塊,用于判斷p與c的差值是否超過設定油壓;
42、當前電量獲取模塊,用于當p與c的差值超過設定油壓時,獲取電池的當前電量;
43、第二判斷模塊,用于判斷電池的當前電量是否未超過設定電量;
44、能量回收模塊,用于當電池的當前電量未超過設定電量時進行能量回收,能量回收包括所述第一油泵和所述第二油泵在油液的驅動下帶動所述電機進行發(fā)電,并將電能存儲于電池。
45、第三方面,本發(fā)明提供一種挖機,該挖機包括:
46、一個或多個處理器;
47、存儲裝置,用于存儲一個或多個程序;
48、當所述一個或多個程序被所述一個或多個處理器執(zhí)行,使得所述一個或多個處理器控制挖機實現(xiàn)如任一上述方案中所述的動臂解耦液壓系統(tǒng)的控制方法。
49、第四方面,本發(fā)明提供一種存儲介質,其上存儲有計算機程序,該程序被處理器執(zhí)行時使得挖機實現(xiàn)如任一上述方案中所述的動臂解耦液壓系統(tǒng)的控制方法。
50、本發(fā)明的有益效果如下:
51、本發(fā)明提供一種動臂解耦液壓系統(tǒng)的控制方法、裝置、挖機及存儲裝置,該動臂解耦液壓系統(tǒng)的控制方法,通過獲取動臂下降的控制信號,獲取工作油壓p,獲取補油油路的補油壓力c,判斷p與c的差值是否超過設定油壓,當p與c的差值超過設定油壓的時候,獲取電池的當前電量,并判斷電池的當前電量是否未超過設定電量,當電池的當前電量未超過設定電量時,進行能量回收,控制方法簡單,且適合閉式液壓系統(tǒng)。
- 還沒有人留言評論。精彩留言會獲得點贊!