用于復位至少一個線路的復位裝置的制作方法
本發明涉及一種復位裝置,用于復位并且優選地引導至少一個線路,特別是在關節臂機器人處復位并且優選地引導至少一個線路。該發明還涉及具有這種復位裝置的關節臂機器人。
背景技術:
1、例如,關節臂機器人用于引導施工人員將施加材料施加到部件上,例如機動車車身和/或其附件。這種施加器通常連接到線路,例如流體管路和用于能源和信息傳輸的線纜。沿著關節臂機器人鋪設線路是一項特別的挑戰。一方面,線路不應限制關節臂機器人的靈活性。另一方面,這些線路不應在關節臂機器人處產生明顯的干擾輪廓,特別是在機械手部處。
2、可以使用諸如圈夾、夾子等將線路固定到關節臂機器人上。然而,在這里,問題是由機器人的運動引起的。特別是,這樣做的原因是線路必須執行補償運動,因為它們不能總是鋪設在所謂的中性纖維中。根據機器人的位置,這種補償運動有時需要或多或少的線路長度。
3、在一個簡單的例子中,可以通過提供“環”來實現必要的線路長度變化,然后根據機器人的位置關閉(延長)或打開(縮短)。然而,這樣做的缺點是,由于線路的運動未被限定,其會出現不可預測的干擾輪廓。在具有指定工作區域的施加過程中,這可能會導致與施加部件(例如車身)發生意外碰撞。
4、通常會妥協采用只有一維長度補償的一維引導裝置,因為這通常會導致將高負載作用在線路上。其中一個原因特別是補償線路方向變化的能力有限,因為這種引導裝置只作用于一個方向。這會對線路的壽命產生負面影響。在某些情況下,甚至無法實現機器人軸的某些運動組合。
5、例如,wo2008037276a1公開了一種用于引導軟管的裝置,該軟管包括至少一個供應線路,所述裝置包括具有至少三個引導桿的引導元件,其中,所述軟管可抵抗所述復位元件的復位力地被引導,其中,所述引導元件的在縱向方向上彼此相反地定位的端側由形成軟管入口的前置保持環和后保持元件形成,引導桿被夾持在它們之間,其中,在每種情況下,兩個相鄰的引導桿之間形成用于至少一個供應線路的多個側向出口開口。然而,wo2008037276a1中示出的裝置會產生相對較大的干涉輪廓,特別是在機械手部和承載機械手部的機械臂處。此外,該裝置在設計上相對復雜,通常會在軟管上產生相對較高的拉伸載荷。此外,該裝置僅產生一維長度補償,這與現代關節臂機器人的運動可能性不相符。
技術實現思路
1、本發明的目的是提供一種替代的和/或改進的復位裝置,用于復位、特別是引導至少一個線路,優選地是具有有利的輕質性的復位裝置,該復位裝置包括低設計復雜性和/或能夠提高施加器相對于施加部件(例如,機動身和/或其附件)的可接近性,特別是通過最小化沿機械手部和/或機械臂的干涉輪廓、特別是在機械手側的干涉輪廓來提高可接近性。
2、該目的可以通過獨立權利要求的特征來解決。本發明的有利的進一步實施例公開在從屬權利要求中或來自以下對本發明的優選實施例的描述中。
3、本發明涉及一種復位裝置,用于復位并且優選地引導至少一個線路。
4、所述復位裝置包括特別是彈性的(優選為條形的,例如桿狀的)復位元件,該復位元件用于復位至少一個線路,例如用于對所述至少一個線路進行長度補償和/或(特別是多維的)方向補償。
5、所述復位裝置還包括安裝裝置,該安裝裝置用于(例如,不可滑動和/或不可旋轉)地安裝、特別是支撐復位元件,優選地在關節臂機器人處安裝、特別是支撐。
6、所述復位裝置還包括引導裝置,該引導裝置用于適宜地引導并且優選地(特別是至少部分地)容納至少一個線路。
7、例如,安裝裝置可以包括(優選地是平坦的或彎曲的)安裝板。
8、例如,引導裝置可以是環形的和/或設計為環形夾結構。
9、例如,至少一個線路可以被容納在引導裝置中(適宜地以無間隙的方式或以有間隙的方式)和/或被引導通過引導裝置(適宜地以無間隙的方式或以有間隙的方式)。
10、該復位裝置的突出之處在于,該復位元件被設計為彈性擺動元件(例如擺動、樞轉和/或彎曲臂)。
11、擺動元件可以設計為例如相對于安裝裝置特別是彈性地(例如自由)可擺動、可彎曲和/或可樞轉。
12、復位元件可以適宜地彈性變形,優選在其縱向方向上。替代地或附加地,所述復位元件可以在其側向方向上適宜地彈性變形,優選地在其側向方向上易于在空間中自由地變形和/或運動。因此,復位元件優選地可以設計為在軸向和/或側向彈性地變形。
13、安裝裝置優選地形成樞轉基座,并且引導裝置優選地形成可繞樞轉基座(特別是橫向和/或側向于復位元件的縱向方向)擺動的引導頭。例如,引導頭可以在此自由地擺動。
14、復位元件可用于對至少一個線路進行長度補償和/或(例如側向)方向補償。
15、例如,引導裝置可以設計為引導頭和/或形成復位裝置的自由端。
16、所述復位元件可以在所述安裝裝置和所述引導裝置之間特別是軸向地延伸,和/或所述安裝裝置和所述引導裝置形成并優選地安裝在所述復位元件的軸向相反兩端。
17、例如,特別是彈性的復位元件可以包括其力圖復位的基礎位置和/或其基本上沿直線延伸的基礎位置(例如原始形狀)。因此,例如,在取消或減少由至少一個線路產生的力后,復位元件可以適宜地力圖復位到基礎位置。
18、復位元件可以配置為可自由擺動(例如,橫向和/或側向于復位元件的縱向方向)。
19、復位元件、進而引導裝置可配置為可自由擺動(特別是相對于安裝裝置和/或彈性地)和/或設計用于至少一個線路在多個(優選地在所有三個)空間方向上的多維(特別是彈性)復位。替代地或附加地,引導裝置(特別是通過復位元件)例如可以自由地在空間中自由運動,特別是彈性地運動,和/或可以在多個(優選在所有三個)空間方向上運動,特別是彈性地運動。
20、所述復位元件優選地為彈簧,例如螺旋彈簧。
21、例如,彈簧可以設計為壓簧和/或拉簧,例如壓縮螺旋彈簧和/或拉伸螺旋彈簧。
22、復位元件可以(特別是復位至少一個線路)是彈性變形的,例如在其縱向方向和/或側向方向上。
23、所述引導裝置可配置為引導至少一個線路經過所述復位元件(特別是在外部),優選地橫向地、特別是基本上正交地經過所述復位元件。因此,復位元件可以優選地布置在至少一個線路的外部,例如,使得至少一個線路不延伸到例如,進入或穿過復位元件,和/或不延伸到例如,進入或穿過安裝裝置。
24、例如,引導裝置可以限定用于至少一個線路的引導軸線(特別是通道軸線),其中,例如,引導軸線可以定向為橫向于、特別是基本上正交于復位元件的縱向軸線。
25、例如,可以將復位元件設計為通過至少一個線路而適宜地彎曲(特別是在多個空間方向上,優選地在所有三個空間方向上),從而經受彎曲力,例如,彎曲產生的復位力可以橫向地產生到復位元件的縱向延伸尺度上。替代地或附加地,例如,可以將復位元件設計為通過至少一個線路適宜地被拉動,從而承受拉應力,例如,可以在復位元件的縱向尺度上通過張力產生復位力。替代地或附加地,例如,可以將復位元件設計為通過至少一個線路而適宜地扭曲,從而受到扭轉,例如,可以產生通過扭轉產生的復位力。
26、因此,至少一個線路的所有旋轉運動、縱向運動和/或扭轉運動都可以由復位元件有利地開啟、特別是完全控制。這是復位裝置的主要優點之一。
27、復位元件可以設計為彎曲、特別是彈性彎曲和/或側向彈性偏轉例如至少(或大于)20°、30°、40°、50°、60°、70°、80°、90°、100°、110°、120°、130°、140°、150°、160°、170°、180°、190°或200°。優選地,復位元件被允許可至少在半圓弧或更大范圍內發生彈性變形。
28、復位元件可以形成為支撐在安裝裝置上和/或從安裝裝置伸出的懸臂,例如,以便通過復位元件的縱向延伸尺度將引導裝置、進而至少一個線路與安裝裝置、進而關節臂機器人保持距離。因此,復位元件可以有利地形成(適宜地足夠長的)杠桿臂,優選地用于復位至少一個線路和/或用于將至少一個線路與安裝裝置、進而特別是與關節臂機器人(例如,下面進一步描述的第二機械臂)保持距離。
29、例如,復位元件可以相對于復位元件的縱向軸線橫向彈性彎曲和/或可以相對于復位元件的縱向軸線進行側向彈性偏轉。替代地或附加地,例如,引導裝置可以限定用于至少一個線路的引導軸線,其中,復位元件可以配置為橫向于、特別是基本上正交于引導裝置的引導軸軸線(有利地彈性地)運動。
30、例如,引導裝置可以設計為(可敞開或可閉合的)引導環。例如,環可以設計為可打開和/或可關閉的方式,以便能夠有利地容納至少一個線路。
31、例如,引導裝置可以配置為(至少部分地)容納和/或引導至少一個線路。
32、例如,至少一個線路可以以無間隙或有間隙的方式被容納在引導裝置中,和/或被引導穿過引導裝置。
33、引導裝置可以配置為容納和/或支撐在軸向上(特別是基本上自由地)可滑動和/或可旋轉的至少一個線路。例如,這使得至少一個線路可以在引導裝置中軸向運動和/或旋轉。
34、因此,引導裝置可以配置為限制至少一個線路在至少一個線路的(優選地僅)徑向上的運動(適宜地以無間隙方式或以有間隙方式),但允許例如至少一個線路的軸向運動和/或旋轉運動。
35、例如,復位元件的最小長度基本上為15cm、20cm、25cm、30cm或35cm。
36、至少一個線路可以包括例如用于流體傳輸(例如,用于傳輸施加材料和/或空氣,特別是壓縮空氣)的至少一個流體線路和/或特別是用于能源和/或信息傳輸的至少一個線纜(例如,控制線纜、接地線纜、數據線纜和/或用于電流傳輸的線纜)。例如,至少一個線路可以是施加軟管或包含施加軟管。
37、至少一個線路可以包括例如引導軟管(例如包絡軟管)和/或引導鏈,優選地用于容納用于流體傳輸(例如,用于傳輸施加材料和/或空氣,特別是壓縮空氣)的至少一個流體線路和/或特別是用于能源和/或信息傳輸的至少一個線纜(例如,控制線纜、接地線纜、數據線纜和/或用于電流傳輸的線纜)。
38、例如,引導軟管可以設計為波紋軟管。
39、復位元件可以用于對至少兩個特別是獨立的線路(例如,引導軟管和/或引導鏈)進行復位,例如長度補償和/或(優選地是多維的,特別是側向的)方向補償。
40、具有至少兩個(例如,基本平行或非平行設置)本文公開的復位裝置的實施例也是可能的,其復位元件可以例如地彼此基本平行或非平行地延伸。
41、應該提到的是,引導裝置優選地設計為容納和/或通過至少一個線路(適宜地以無間隙方式或以有間隙方式)通過,例如,使得至少一個線路可以軸向滑動和/或可旋轉地容納在引導裝置中。然而,在實施例中,至少一個線路可以不可滑動和/或不可旋轉地容納在引導裝置中。
42、應該再次提到的是,復位元件可以是擺動元件,其優選地在其縱向方向和/或側向方向上彈性變形。復位元件優選地為軸向和/或側向彈性變形的擺動元件。
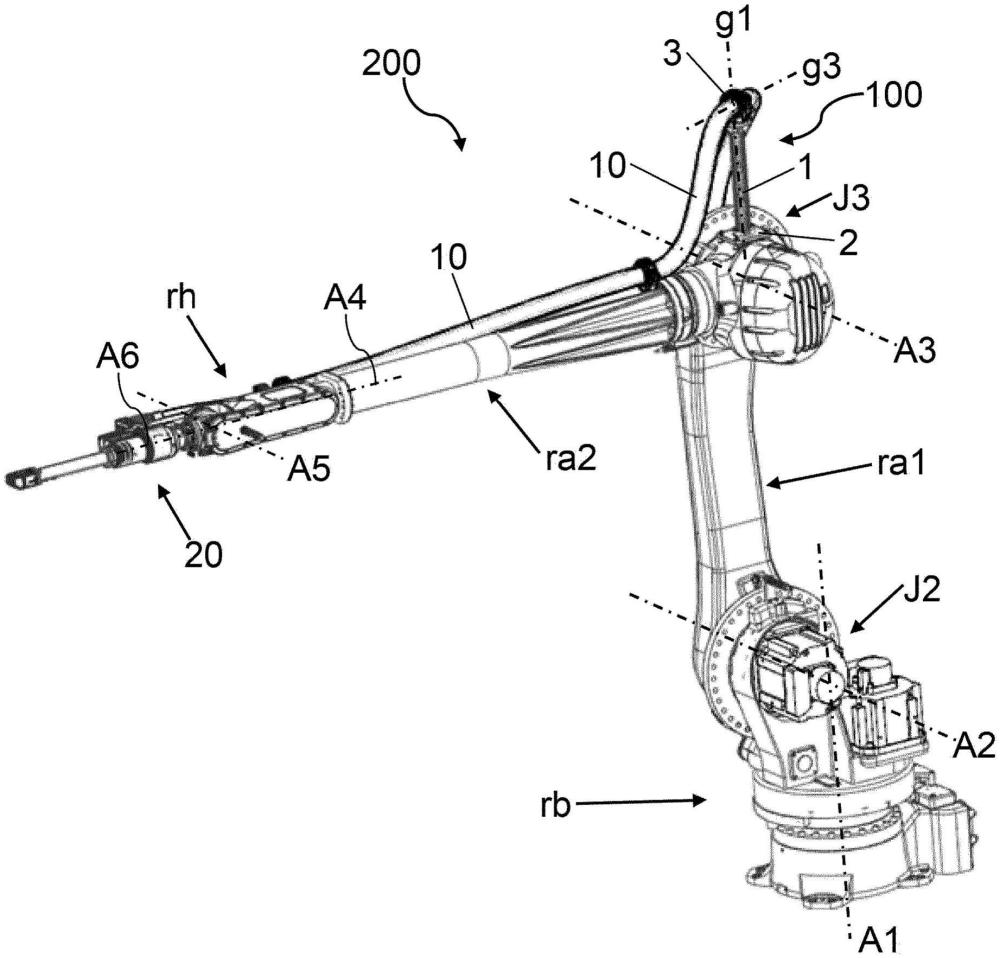
43、本發明還涉及一種關節臂機器人,優選地用于將施加材料施加于部件(例如,機動車車身和/或其附件),具有至少一個如本文公開的復位裝置。
44、關節臂機器人可以包括例如機器人基座、第一(例如近端和/或接近機器人基座)機械臂、第二(例如遠端和/或遠離機器人基座)機械臂以及例如機械手部。
45、例如,機械手部可以包含至少兩個、優選地是三個(特別是可旋轉)運動軸線。
46、例如,關節臂機器人可以包含至少4個、至少5個或至少6個(優選地是可旋轉)運動軸線。
47、復位元件可從關節臂機器人伸出,以便通過復位元件的縱向延伸尺度將引導裝置、進而至少一個線路與關節臂機器人保持距離。因此,所述復位元件可以有利地形成(適宜地足夠長的)杠桿臂,優選地用于復位至少一個線路和/或用于將至少一個線路與安裝裝置、進而特別是與關節臂機器人保持距離。
48、第二機械臂可以通過機器人鉸接部繞運動軸線可樞轉地支撐在第一機械臂處,其中優選地,機器人鉸接部可以適宜地布置在第一機械臂和第二機械臂之間。
49、例如,安裝裝置可以附接至第二機械臂和/或機器人鉸接部。
50、例如,安裝裝置和復位元件可以與第二機械臂一起樞轉(優選地是繞第二機械臂的運動軸線)。
51、例如,復位元件可以從第二機械臂和/或機器人鉸接部伸出,特別是以懸臂形狀的方式伸出。
52、例如,復位元件可以包含復位元件力圖復位的基礎位置(特別是原始形狀)。替代地或附加地,復位元件可以在基礎位置(特別是原始形狀)大致沿直線延伸。
53、因此,例如,復位元件可以取消或減少通過至少一個線路產生的力之后適宜地力圖復位基礎位置。
54、在基礎位置,引導裝置可以包括例如到關節臂機器人的最小距離,特別是到第二機械臂和/或到機器人鉸接部的最小距離,其至少為15cm、20cm、25cm、30cm或35cm,以便優選地能夠形成足夠長的杠桿臂。
55、所述復位元件(例如在基礎位置)可定向為橫向于、優選地大致正交于第二機械臂的運動軸線;可定向為橫向于、優選地大致正交于第二機械臂的縱向軸線;可定向為基本平行于第一機械臂的縱向軸線,和/或特別是定向為從安裝裝置開始遠離關節臂機器人(例如,第二機械臂和/或第一機械臂)。
56、將至少一個線路可以通過引導裝置被(優選地橫向,特別是大致正交地)引導穿過復位元件,因此,優選地,例如,至少一個線路不伸入或穿過復位元件和/或不伸入或穿過安裝裝置。
57、例如,至少一個線路可以穿過引導裝置和/或適宜地安裝在引導裝置中。
58、例如,至少一個線路可以以弧形方式被引導到引導裝置中和/或以弧形方式從引導裝置中引出。
59、至少一個線路可以從引導裝置(例如基本上以s形方式)被引導至第二機械臂,并且優選地適宜地固定在第二機械臂上。
60、例如,所述至少一個線路可以基本上以s形方式從所述引導裝置被引導至所述第二機械臂。例如,s形可以在二維或三維中延伸。因此,s形可以是平面的,也可以是空間的。
61、例如,在關節臂機器人操作期間,復位元件可以設計為彈性彎曲和/或側向彈性偏轉例如至少(或大于)20°、30°、40°、50°、60°、70°、80°、90°、100°、110°、120°、130°、140°、150°、160°、170°、180°、190°或200°。優選地,復位元件可以彈性變形至少達到半圓弧或更大。
62、例如,在關節臂機器人操作期間,復位元件可以設計為相對于第二機械臂的縱向軸線橫向彎曲(特別是彈性彎曲)和/或相對于第二機械臂的運動軸線橫向彎曲(特別是彈性彎曲)。
63、機械手部的運動可能會導致復位元件特別是彈性彎曲和/或側向偏轉。
64、例如,機械手部的運動可作用于復位元件、例如在朝向機械手部的方向上,使其優選地在朝向機械手部的方向上彎曲,其中,替代地或附加地,機械手部的運動可以作用于復位元件,例如,在遠離機械手部的方向上,使其優選地在遠離機械手部的方向上彎曲。
65、可以,至少一個線路可以適宜地固定至第二機械臂和/或機械手部,特別是為了有利地減少關節臂機器人的干涉輪廓。
66、至少一個線路可以例如通過至少一個保持器(例如環形引導元件、夾具和/或環夾結構等)適宜地可軸向滑動或不可滑動和/或可旋轉或不可旋轉地固定在第二機械臂上。
67、替代地或附加地,至少一個線路可以例如通過至少一個保持器(例如環形引導元件、夾具和/或環夾結構等)適宜地可軸向滑動或不可滑動和/或可旋轉或不可旋轉地固定在機械手部上。
68、例如,第二機械臂和/或機械手部可以相對于引導裝置可運動,例如,第二機械臂和/或機械手部通過至少一個線路的運動導致復位元件的變形。
69、例如,第一機械臂可以是近端的,特別是靠近機器人基座的機械臂和/或在機器人基座處被可樞轉地支撐。
70、例如,第二機械臂可以是遠端(特別是遠離機器人基座的)機械臂和/或在第一機械臂處被可樞轉地支撐。
71、第二機械臂可以適宜地承載機械手部。
72、第二機械臂優選設置在所述第一機械臂與所述機械手部之間。
73、所述至少一個線路與所述第二機械臂之間的凈距離(例如,沿所述第二機械臂縱向延伸尺度的至少30%、40%、50%、60%、70%或80%)優選地小于5cm、4cm、3cm、2cm或1cm。替代地或者附加地,至少一個線路與機械手部之間的凈距離(例如,沿機械手部縱向延伸尺度的至少30%、40%、50%、60%、70%或80%)可以優選地小于5cm、4cm、3cm、2cm或1cm。例如,凈距離至少部分地可以為大致0cm。
74、例如,機械手部可以攜帶施加器,用于將施加材料施加到部件(例如,機動車車身和/或其附件)上。
75、至少一個流體線路和/或至少一個線纜可以適宜地連接到施加器。
76、應該提到的是,本發明優選地可用于機動車車身的內部施加(例如內部噴漆、內部涂層或內部密封等),特別是因為可以通過本發明有利地實現低干擾輪廓。
77、例如,施加材料可以是光澤涂料、粘合劑、絕緣劑、密封劑或底漆,此處僅舉幾個示例。
- 還沒有人留言評論。精彩留言會獲得點贊!