一種機械設備用機械臂結構的制作方法
本技術涉及機械臂,具體為一種機械設備用機械臂結構。
背景技術:
1、機械臂是指高精度,多輸入多輸出、高度非線性、強耦合的復雜系統,因其獨特的操作靈活性,已在工業裝配、安全防爆等領域得到廣泛應用,機械臂是一個復雜系統,存在著參數攝動、外界干擾及未建模動態等不確定性,因而機械臂的建模模型也存在著不確定性,對于不同的任務,需要規劃機械臂關節空間的運動軌跡,從而級聯構成末端。
2、請參閱公告號為cn114454209a的一種機械設備用機械臂結構,包括底板,所述底板的頂部靠近右側固定安裝有右立柱,右立柱的頂部固定安裝有頂板,底板的頂部靠近左側固定安裝有左立柱,底板的頂部安裝有工件升降機構,左立柱和右立柱均與工件升降機構連接,左立柱的外側活動安裝有活動板,通過把手和滑塊以及橫桿之間的配合,能夠使得滑塊向左移動,從而使得第二彈簧壓縮,并通過轉動桿和連接套以及三角塊之間的配合,能夠使得三角塊向下移動,并通過側桿和導向桿以及導向槽之間的配合,繼而能夠使得三個夾板轉動并相互遠離,而當第二彈簧復位時能夠使得三個夾板轉動并相互靠近,從而能夠對工件進行夾持,從而方便實現對工件的固定。
3、但是,在該專利中,利用彈簧的彈力使夾板完成對工件進行夾持,沒有對進行限位,造成彈簧不穩定,在受到震動時,容易造成彈簧伸縮,造成夾板對工件夾持不牢固,影響機械臂對工件的夾持和移動效果,降低了機械臂結構的實用性。
技術實現思路
1、針對現有技術的不足,本實用新型提供了一種機械設備用機械臂結構,具備方便調節、自鎖等優點,解決了利用彈簧的彈力使夾板完成對工件進行夾持,沒有對進行限位,造成彈簧不穩定,在受到震動時,容易造成彈簧伸縮,造成夾板對工件夾持不牢固,影響機械臂對工件的夾持和移動效果,降低機械臂結構實用性的問題。
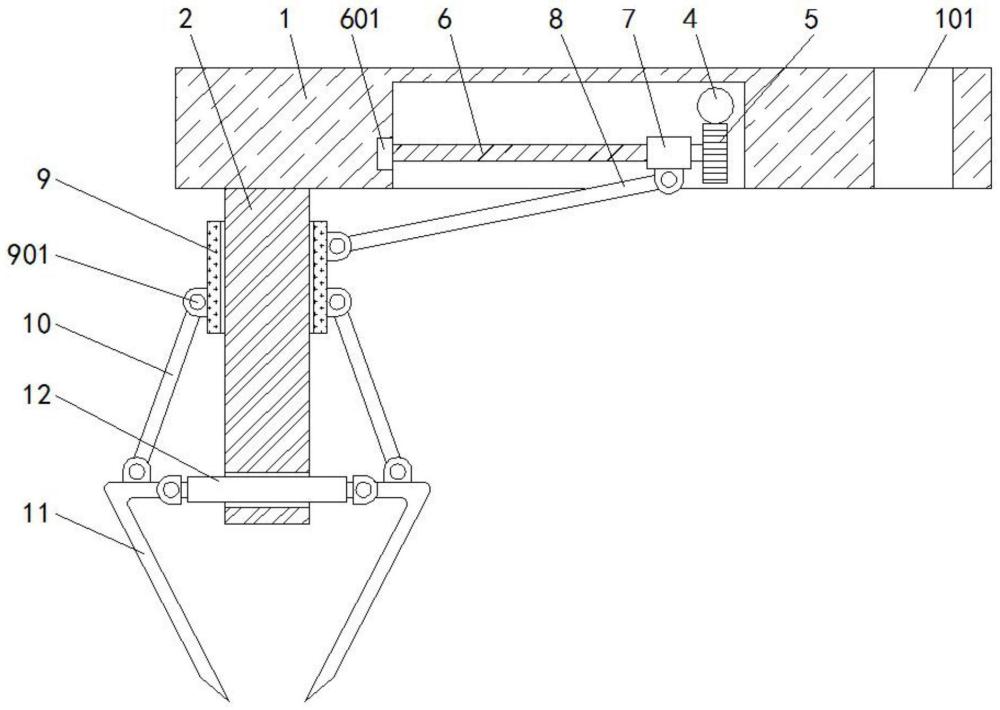
2、為實現上述目的,本實用新型提供如下技術方案:一種機械設備用機械臂結構,包括安裝板和固定柱,所述安裝板的外部設置有調節機構;
3、所述調節機構包括與固定板固定連接的驅動電機,所述驅動電機的輸出端固定連接有與安裝板轉動連接的蝸桿,所述蝸桿的底部嚙合有蝸輪,所述蝸輪的內部固定連接有絲桿,所述絲桿的外部螺紋連接有滑動座,所述滑動座的底部鉸接有拉桿,所述拉桿的另一端鉸接有與固定柱套接的連接筒,所述連接筒的左右兩側均鉸接有連桿,所述連桿的另一端鉸接有夾持板,兩個所述夾持板相對的一側鉸接有與固定柱固定連接的雙頭伸縮桿。
4、進一步,所述安裝板的內部開設有安裝孔,所述安裝孔靠近安裝板的右側。
5、進一步,所述安裝板的內部開設有轉孔,所述蝸桿通過轉孔與安裝板轉動連接,所述蝸桿位于安裝板的內部。
6、進一步,所述絲桿遠離蝸輪的一端固定連接有軸承,所述軸承與安裝板固定連接。
7、進一步,所述安裝板的內部開設有貫穿槽,所述拉桿通過貫穿槽貫穿安裝板與連接筒鉸接。
8、進一步,所述連接筒的左右兩側均固定連接有鉸接座,所述連接筒通過鉸接座與連桿鉸接。
9、與現有技術相比,本申請的技術方案具備以下有益效果:
10、該機械設備用機械臂結構,通過設置調節機構,方便對機械臂結構進行調節,便于機械臂結構對工件的夾持限位,為機械臂結構增加及自鎖功能,解決了利用彈簧的彈力使夾板完成對工件進行夾持,沒有對進行限位,造成彈簧不穩定,在受到震動時,容易造成彈簧伸縮,造成夾板對工件夾持不牢固,影響機械臂對工件的夾持和移動效果,降低機械臂結構實用性的問題。
技術特征:
1.一種機械設備用機械臂結構,包括安裝板(1)和固定柱(2),其特征在于:所述安裝板(1)的外部設置有調節機構;
2.根據權利要求1所述的一種機械設備用機械臂結構,其特征在于:所述安裝板(1)的內部開設有安裝孔(101),所述安裝孔(101)靠近安裝板(1)的右側。
3.根據權利要求1所述的一種機械設備用機械臂結構,其特征在于:所述安裝板(1)的內部開設有轉孔,所述蝸桿(4)通過轉孔與安裝板(1)轉動連接,所述蝸桿(4)位于安裝板(1)的內部。
4.根據權利要求1所述的一種機械設備用機械臂結構,其特征在于:所述絲桿(6)遠離蝸輪(5)的一端固定連接有軸承(601),所述軸承(601)與安裝板(1)固定連接。
5.根據權利要求1所述的一種機械設備用機械臂結構,其特征在于:所述安裝板(1)的內部開設有貫穿槽,所述拉桿(8)通過貫穿槽貫穿安裝板(1)與連接筒(9)鉸接。
6.根據權利要求1所述的一種機械設備用機械臂結構,其特征在于:所述連接筒(9)的左右兩側均固定連接有鉸接座(901),所述連接筒(9)通過鉸接座(901)與連桿(10)鉸接。
技術總結
本技術涉及一種機械設備用機械臂結構,屬于機械臂技術領域,包括安裝板和固定柱,所述安裝板的外部設置有調節機構,所述調節機構包括與固定板固定連接的驅動電機,所述驅動電機的輸出端固定連接有與安裝板轉動連接的蝸桿,所述蝸桿的底部嚙合有蝸輪,所述蝸輪的內部固定連接有絲桿。該機械設備用機械臂結構,通過設置調節機構,方便對機械臂結構進行調節,便于機械臂結構對工件的夾持限位,為機械臂結構增加及自鎖功能,解決了利用彈簧的彈力使夾板完成對工件進行夾持,沒有對進行限位,造成彈簧不穩定,在受到震動時,容易造成彈簧伸縮,造成夾板對工件夾持不牢固,影響機械臂對工件的夾持和移動效果,降低機械臂結構實用性的問題。
技術研發人員:劉懿萱
受保護的技術使用者:劉懿萱
技術研發日:20240407
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!