一種兩側同步防墜換電機器人的制作方法
本技術涉及新能源重卡換電,尤其涉及一種兩側同步防墜換電機器人。
背景技術:
1、換電重卡在換電過程中需要把重卡上的虧電電池吊裝下來,再由提升機把虧電送到相應的倉儲位,并從倉儲位上吊裝一個滿電電池運送至重卡上。電池提升過程中通常采用鏈條進行升降傳動,但鏈條容易出現疲勞磨損,隨著使用壽命的增加,存在鏈條斷裂的風險,一旦出現鏈條斷裂的情況,將會引發安全事故,造成人員財產損失,如2024年4月19日公告的中國實用新型專利第cn?220811721u號以及2022年1月7日公開的中國發明專利申請第cn113895282a號,均揭示的一種具有防墜功能的換電提升裝置,但并未披露當一個升降機構上具有多個防墜裝置時,如何實現多個防墜裝置之間的同步防墜問題,例如當一側的鏈條失效,而另一側的鏈條未失效時,鑒于此,有必要開發一種兩側同步防墜換電機器人來進一步提升換電安全性。
技術實現思路
1、針對現有技術中的缺陷,本實用新型的目的在于提供兩側同步防墜換電機器人,使換電作業過程中的防墜系統運行更加合理可靠。
2、為實現上述目的,本實用新型采用以下技術方案:
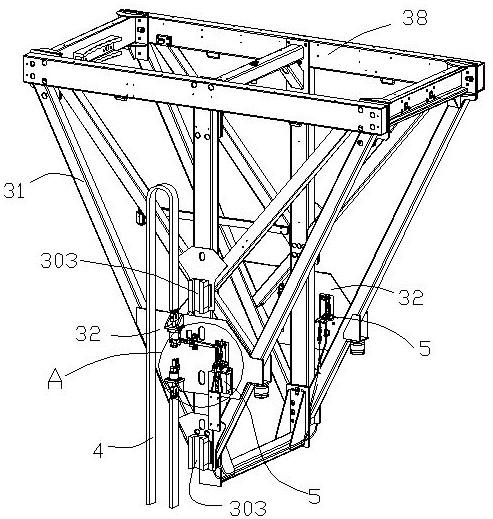
3、提供一種兩側同步防墜換電機器人,包括兩側沿豎直方向分別延伸設有滑動導軌的固定部及與固定部滑動連接的升降部,所述升降部包括與滑動導軌滑動配合的一對升降臂及安裝于各升降臂上的安裝部,所述安裝部上分別設有夾緊裝置,位于不同安裝部上的兩個夾緊裝置之間通過拉線互相連接以實現同步防墜。
4、進一步地,所述固定部的兩側還分別設有沿豎直方向延伸的制動導軌,所述夾緊裝置包括相對設于制動導軌兩側的鎖緊塊以及固定安裝于安裝部上同樣位于制動導軌兩側的導槽,所述導槽沿制動導軌對稱設置并與制動導軌形成夾角,所述鎖緊塊上設有限位柱,所述限位柱至少部分位于對應的導槽中。
5、進一步地,所述夾緊裝置包括同步杠桿,所述同步杠桿通過轉軸樞接于安裝部,所述同步杠桿包括同時連接位于制動導軌兩側的鎖緊塊的施力端及與拉線連接的傳力端。
6、進一步地,所述施力端具有與轉軸平行設置的提拉桿,位于制動導軌兩側的鎖緊塊分別通過螺栓連接于提拉桿的兩端。
7、進一步地,所述安裝部上連接有傳動鏈并安裝有聯動桿,所述聯動桿包括與傳動鏈連接的聯動一端及與夾緊裝置上的同步杠桿的施力端連接的聯動二端,所述聯動桿可轉動地安裝于安裝部。
8、進一步地,所述拉線的一端與位于升降部一側的安裝部上的同步杠桿的傳力端連接,另一端與位于升降部另一側的安裝部上的聯動桿的聯動二端連接。
9、進一步地,所述聯動桿的聯動一端與傳動鏈之間設有第一彈性件,所述聯動桿的聯動二端與夾緊裝置的同步杠桿的施力端之間設有第二彈性件。
10、進一步地,所述拉線的至少一端設有第三彈簧。
11、進一步地,所述固定部包括底座及自底座的相對兩側向上延伸設置的兩個支撐壁,所述滑動導軌設于支撐壁上,兩個支撐壁上分別沿豎直方向上對齊設有驅動齒輪及傳動齒輪,所述傳動鏈分別與傳動齒輪及驅動齒輪嚙合,所述底座上設有驅使驅動齒輪轉動的驅動單元。
12、進一步地,所述安裝部設置于所述滑動導軌及與該滑動導軌匹配的升降壁之間。
13、通過采用前述技術方案,本實用新型的有益效果是:
14、采用拉線將位于兩側的防墜系統互相關聯,當一側的防墜系統啟動時,另一側的防墜系統同步響應,使得換電過程更加安全可靠。
技術特征:
1.一種兩側同步防墜換電機器人(100),包括兩側沿豎直方向分別延伸設有滑動導軌(23)的固定部(2)及與固定部(2)滑動連接的升降部(3),所述升降部(3)包括與滑動導軌(23)滑動配合的一對升降壁(31)及安裝于各升降壁(31)上的安裝部(32),所述安裝部(32)上分別設有夾緊裝置(5),其特征在于,位于不同安裝部(32)上的兩個夾緊裝置(5)之間通過拉線互相連接以實現同步防墜。
2.根據權利要求1所述的兩側同步防墜換電機器人(100),其特征在于:所述固定部(2)的兩側還分別設有沿豎直方向延伸的制動導軌(24),所述夾緊裝置(5)包括相對設于制動導軌(24)兩側的鎖緊塊(51)以及固定安裝于安裝部(32)上同樣位于制動導軌(24)兩側的導槽(52),所述導槽(52)沿制動導軌(24)對稱設置并與制動導軌(24)形成夾角,所述鎖緊塊(51)上設有限位柱(510),所述限位柱(510)至少部分位于對應的導槽(52)中。
3.根據權利要求2所述的兩側同步防墜換電機器人(100),其特征在于:所述夾緊裝置(5)包括同步杠桿(54),所述同步杠桿(54)通過轉軸(56)樞接于安裝部(32),所述同步杠桿(54)包括同時連接位于制動導軌(24)兩側的鎖緊塊(51)的施力端(541)及與拉線連接的傳力端(542)。
4.根據權利要求3所述的兩側同步防墜換電機器人(100),其特征在于:所述施力端(541)具有與轉軸(56)平行設置的提拉桿(543),位于制動導軌(24)兩側的鎖緊塊(51)分別通過螺栓連接于提拉桿(543)的兩端。
5.根據權利要求3所述的兩側同步防墜換電機器人(100),其特征在于:所述安裝部(32)上連接有傳動鏈(4)并安裝有聯動桿(6),所述聯動桿(6)包括與傳動鏈(4)連接的聯動一端(61)及與夾緊裝置(5)上的同步杠桿(54)的施力端(541)連接的聯動二端(62),所述聯動桿(6)可轉動地安裝于安裝部(32)。
6.根據權利要求5所述的兩側同步防墜換電機器人(100),其特征在于:所述拉線的一端與位于升降部(3)一側的安裝部(32)上的同步杠桿(54)的傳力端(542)連接,另一端與位于升降部(3)另一側的安裝部(32)上的聯動桿(6)的聯動二端(62)連接。
7.根據權利要求5所述的兩側同步防墜換電機器人(100),其特征在于:所述聯動桿(6)的聯動一端(61)與傳動鏈(4)之間設有第一彈性件(71),所述聯動桿(6)的聯動二端(62)與夾緊裝置(5)的同步杠桿(54)的施力端(541)之間設有第二彈性件(72)。
8.根據權利要求1至7任意一項所述的兩側同步防墜換電機器人(100),其特征在于:所述拉線的至少一端設有第三彈簧(73)。
9.根據權利要求5至7任意一項所述的兩側同步防墜換電機器人(100),其特征在于:所述固定部(2)包括底座(12)及自底座(12)的相對兩側向上延伸設置的兩個支撐壁(21),所述滑動導軌(23)設于支撐壁(21)上,兩個支撐壁(21)上分別沿豎直方向上對齊設有驅動齒輪(211)及傳動齒輪(212),所述傳動鏈(4)分別與傳動齒輪(212)及驅動齒輪(211)嚙合,所述底座(12)上設有驅使驅動齒輪(211)轉動的驅動單元(120)。
10.根據權利要求1至7任意一項所述的兩側同步防墜換電機器人(100),其特征在于:所述安裝部(32)設置于所述滑動導軌(23)及與該滑動導軌(23)匹配的升降壁(31)之間。
技術總結
本技術公開了一種兩側同步防墜換電機器人(100),包括兩側沿豎直方向分別延伸設有滑動導軌(23)的固定部(2)及與固定部(2)滑動連接的升降部(3),所述升降部(3)包括與滑動導軌(23)滑動配合的一對升降壁(31)及分別安裝于升降壁(31)上的安裝部(32),所述安裝部(32)上設有夾緊裝置(5),位于不同安裝部(32)上的兩個夾緊裝置(5)之間通過拉線互相連接以實現同步防墜,提高了換電機器人的可靠性。
技術研發人員:李立國,張玉良
受保護的技術使用者:四川智鋰智慧能源科技有限公司
技術研發日:20240531
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!