一種懸掛式助力機械手的制作方法
本技術涉及生產輔助設備,具體涉及機械手。
背景技術:
1、車間內短距離搬運產品,產品較重。人工搬運,連續作業,耗費體力,工人在工作時間內需要多次休息,工作效率不高。采用自動化的機器人搬運,雖然省時省力,但是使用成本高昂。
技術實現思路
1、本實用新型所解決的技術問題:短距離搬運較重產品,采用人工搬運,耗費體力,工作效率不高;采用機器人搬運,機器人使用成本高昂。
2、為解決上述技術問題,本實用新型提供如下技術方案:一種懸掛式助力機械手,包括滑行座、與滑行座連接的下垂臂、與下垂臂連接的夾具,滑行座活動配合在天軌上,下垂臂位于滑行座的下方,下垂臂包括與滑行座固定連接的固定臂、與固定臂插接的活動臂,固定臂與下垂臂用氣缸鉸接,下垂臂用氣缸的活塞桿與活動臂連接,在下垂臂用氣缸的驅動下,活動臂能夠相對固定臂升降;下垂臂用氣缸通過鉸接座安裝在固定臂上,鉸接座設有第一夾板,第一夾板與第二夾板配合使用,螺紋連接件連接第一夾板與第二夾板,第一夾板與第二夾板夾緊在固定臂上。
3、工人推動或拉動下垂臂,使滑行座沿天軌滑行,下垂臂及夾具隨之平移。夾具位移至上料工位,夾持產品,產品為軸類或筒類產品。之后,下垂臂用氣缸收縮,驅動活動臂沿固定臂上升,夾具及產品上升。工人推動或拉動下垂臂,使滑行座沿天軌滑行,產品隨之平移至下料工位。所述下垂臂用氣缸伸展,產品下降,落在下料工位上。
4、相比于自動化的機器人,本實用新型的助力機械手,結構簡單,成本低廉,但能夠輔助工人方便地搬運較重的物品。
5、需要調整下垂臂的最大長度時,工人松動螺紋連接件,調整第一夾板與第二夾板夾持在固定臂上的位置,再擰緊螺紋連接件,使第一夾板與第二夾板夾緊在固定臂上。下垂臂用氣缸的伸展與復位幅度是固定的,將下垂臂用氣缸的位置上調,活動臂伸出固定臂的長度變短,下垂臂的最大長度變短;將下垂臂用氣缸的位置下調,活動臂伸出固定臂的長度變長,下垂臂的最大長度變長。如此,使下垂臂及其上的夾具適應不同的工作情況,例如,夾具所要夾取的產品高度變高或變低。
6、固定臂的橫截面為方形,活動臂的橫截面為方形,兩者均中空,活動臂在固定臂的中空腔中升降,方形的中空腔對活動臂起到導向作用。另外,固定臂的橫截面為方形,利于鉸接座的第一夾板與第二夾板夾緊在固定臂上。
7、活動臂的底端焊接有連接部,下垂臂用氣缸的活塞桿通過第一螺栓與連接部連接。下垂臂用氣缸的缸體與固定臂鉸接,該鉸接方式能夠吸收下垂臂用氣缸與下垂臂之間的平行誤差,使下垂臂及下垂臂用氣缸均能正常伸展或收縮。
8、活動臂的底端連接有延伸臂,延伸臂頂端的延伸臂法蘭與所述連接部通過第二螺栓連接,延伸臂上焊接有夾具安裝座,夾具通過第三螺栓與夾具安裝座連接。
9、所述夾具包括固定在夾具安裝座上的框形支架、安裝在框形支架中的夾具氣缸、鉸接在框形支架上的一對夾爪,夾具氣缸的活塞桿上設有連接塊,夾爪與連接塊通過連桿連接。夾具氣缸動作,驅動連桿,連桿驅動一對夾爪打開或合攏,一對夾爪合攏時,夾持零件,一對夾爪打開時,釋放零件。
10、夾爪上安裝有防滑板塊。夾爪夾緊產品時,防滑板塊與產品直接接觸,防滑板塊上的防滑條紋能夠防止產品相對夾爪滑動。
11、延伸臂上安裝有把手架,把手架的兩端設有連接片狀結構,第四螺栓連接一對連接片狀結構,一對連接片狀結構夾緊在延伸臂上,夾具位于延伸臂的前方而把手架位于延伸臂的后方。把手架上可以安裝控制器,控制器對下垂臂用氣缸及夾具氣缸進行控制。工人握持把手架,能夠拉動或推動下垂臂,使滑行座沿天軌位移。
12、所述滑行座包括滑行座頂板、焊接在滑行座頂板左右兩側的拱形支架,每一拱形支架的前后兩端鉸接有三角形支座,三角形支座上設有滾輪,滾輪配合在橫截面呈方形狀的天軌中。固定臂的頂部法蘭與滑行座頂板通過第五螺栓連接。天軌的底面開設條形槽,條形槽與天軌的內腔連通。滾輪安裝在滾輪架上,滾輪架焊接在三角形支座上。滾輪架配合在所述條形槽中,三角形支座位于天軌的下方,滾輪位于天軌的內腔中,抵壓在天軌內腔的底面上。如此,滑行座能夠活動配合在天軌上。
技術特征:
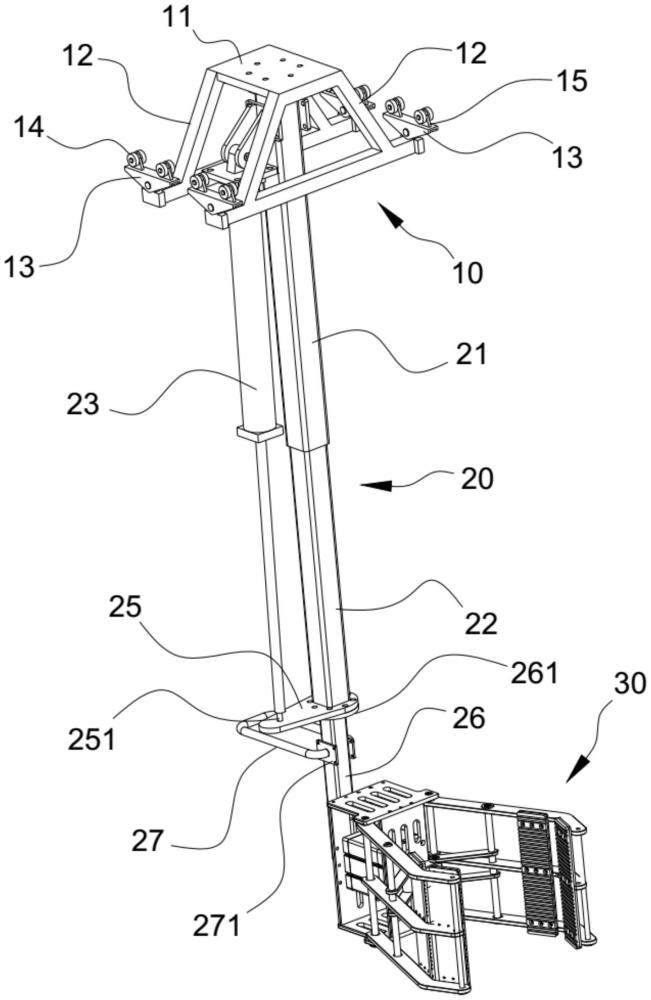
1.一種懸掛式助力機械手,包括滑行座(10)、與滑行座連接的下垂臂(20)、與下垂臂連接的夾具(30),其特征在于:滑行座活動配合在天軌(40)上,下垂臂位于滑行座的下方,下垂臂包括與滑行座固定連接的固定臂(21)、與固定臂插接的活動臂(22),固定臂與下垂臂用氣缸(23)鉸接,下垂臂用氣缸的活塞桿與活動臂連接,在下垂臂用氣缸的驅動下,活動臂能夠相對固定臂升降;下垂臂用氣缸(23)通過鉸接座(24)安裝在固定臂上,鉸接座設有第一夾板(241),第一夾板與第二夾板(242)配合使用,螺紋連接件連接第一夾板與第二夾板,第一夾板與第二夾板夾緊在固定臂(21)上。
2.如權利要求1所述的懸掛式助力機械手,其特征在于:固定臂(21)的橫截面為方形,活動臂(22)的橫截面為方形。
3.如權利要求1所述的懸掛式助力機械手,其特征在于:活動臂(22)的底端焊接有連接部(25),下垂臂用氣缸(23)的活塞桿通過第一螺栓(251)與連接部連接。
4.如權利要求3所述的懸掛式助力機械手,其特征在于:活動臂(22)的底端連接有延伸臂(26),延伸臂頂端的延伸臂法蘭(261)與所述連接部(25)通過第二螺栓連接,延伸臂上焊接有夾具安裝座(262),夾具(30)通過第三螺栓與夾具安裝座連接。
5.如權利要求4所述的懸掛式助力機械手,其特征在于:所述夾具(30)包括固定在夾具安裝座(262)上的框形支架(31)、安裝在框形支架中的夾具氣缸(32)、鉸接在框形支架上的一對夾爪(33),夾具氣缸的活塞桿上設有連接塊(34),夾爪與連接塊通過連桿(35)連接。
6.如權利要求5所述的懸掛式助力機械手,其特征在于:夾爪(33)上安裝有防滑板塊(36)。
7.如權利要求4所述的懸掛式助力機械手,其特征在于:延伸臂(26)上安裝有把手架(27),把手架的兩端設有連接片狀結構(271),第四螺栓連接一對連接片狀結構,一對連接片狀結構夾緊在延伸臂(26)上,夾具(30)位于延伸臂的前方而把手架(27)位于延伸臂的后方。
8.如權利要求1所述的懸掛式助力機械手,其特征在于:所述滑行座(10)包括滑行座頂板(11)、焊接在滑行座頂板左右兩側的拱形支架(12),每一拱形支架的前后兩端鉸接有三角形支座(13),三角形支座上設有滾輪(14),滾輪配合在橫截面呈方形狀的天軌(40)中。
技術總結
本技術公開了一種懸掛式助力機械手,包括滑行座、與滑行座連接的下垂臂、與下垂臂連接的夾具,滑行座活動配合在天軌上,下垂臂包括與滑行座固定連接的固定臂、與固定臂插接的活動臂,固定臂與下垂臂用氣缸鉸接,下垂臂用氣缸的活塞桿與活動臂連接。工人推動或拉動下垂臂,使滑行座沿天軌滑行。夾具位移至上料工位,夾持產品。之后,下垂臂用氣缸收縮,驅動活動臂沿固定臂上升,夾具及產品上升。工人推動或拉動下垂臂,使滑行座沿天軌滑行,產品隨之平移至下料工位。所述下垂臂用氣缸伸展,產品下降,落在下料工位上。相比于自動化的機器人,本發明的助力機械手,結構簡單,成本低廉,但能夠輔助工人方便地搬運較重的物品。
技術研發人員:張永俊
受保護的技術使用者:蘇州海駿自動化機械有限公司
技術研發日:20240704
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!